

מגננה היא מרכיב פסיבי נפוץ לאחסון אנרגיה במעגלים, שמשתתף בתפקידי סינון, הגברת וירידה של מתחים בעיצוב של מקורות כוח מתחלפים. בשלב המוקדם של תכנון הסכימה, מהנדסים אינם צריכים רק לבחור את ערכי המגננות המתאימים, אלא גם לקחת בחשבון את הזרם שהמגננה יכולה לסבול, את ה-DCR של הסליל, מימדים מכניים, אובדנים ועוד. אם הם אינם מוכרים מספיק לתפקידי המגננה, הם יכלו להיות פעמים רבות פסיביים בעיצוב ולבזבז הרבה זמן.
הבנת התפקודים של מגננות
מגננה היא האלמנט "L" במעגל הסינון LC ביציאה של מקור כוח מתחלף. בהמרה למטה (Buck), אחד הקצוות של המגננה מחובר למתח היציאה ה-DC, בעוד הקצה השני מתחלף בין המתח הקלט לבין GND לפי תדר ההחלפה.
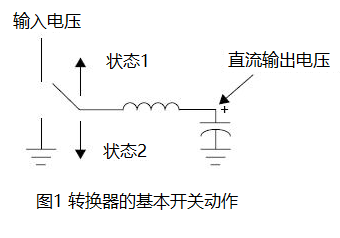
במצב 1, המגננה מחוברת למתח הקלט דרך ה-MOSFET. במצב 2, המגננה מחוברת ל-GND.
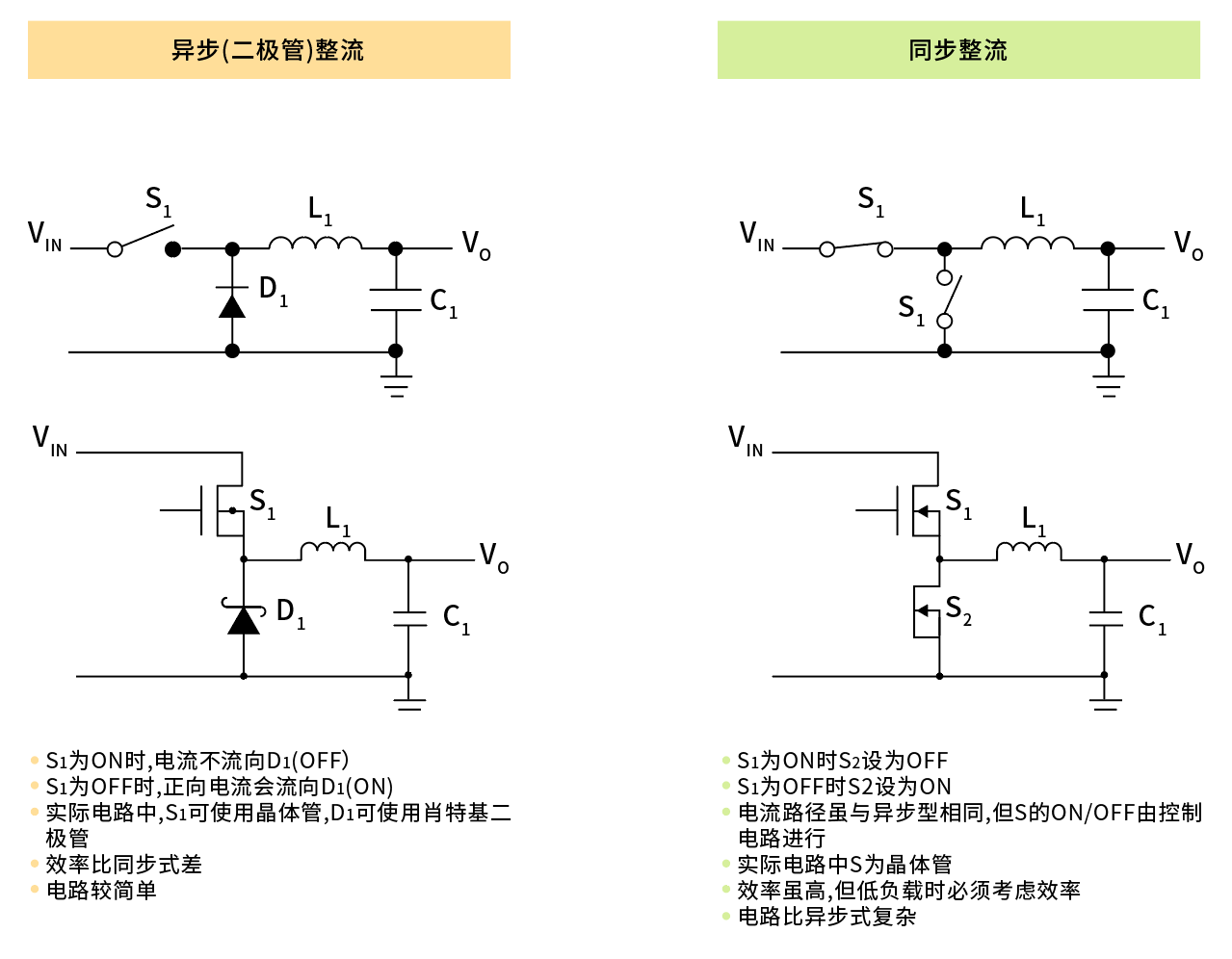
בגלל השימוש בסוג של מנהל זה, יש שתי דרכים להאריך את האינדוקטור: הארחה דרך דיאוד או דרך מוספט. אם מתבנת השיטה הראשונה, הממיר נקרא מצב אסינכרוני. במקרה השני, הממיר נקרא במצב סינכרוני.
במצב 1, אחד הקצוות של האינדוקטור מחובר למתח הקלט, והקצה השני מחובר למתח הפלט. עבור ממיר בק, מתח הקלט חייב להיות גבוה יותר ממתח הפלט, כך שנוצר ירידה במתח קדימה על פני האינדוקטור.
במצב 2, הקצה של האינדוקטור שהיה מחובר למתח הקלט מחובר לאדמה. עבור ממיר בק, מתח הפלט הוא בהכרח הטור הפוזיטיבי, כך שנוצר ירידה במתח שלילי על פני האינדוקטור.
נוסחת חישוב מתח אינדוקטור
V=L(dI/dt). מכיוון שהזרם דרך האינדוקטור גדל כאשר המתח על האינדוקטור חיובי (מצב 1) ויורד כאשר המתח שלילי (מצב 2), תצוגת הזרם של האינדוקטור מופיעה בתרשים 2:
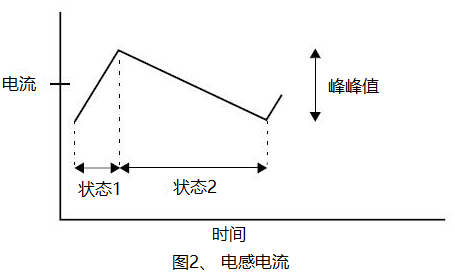
מהתרשים לעיל, ניתן לראות שהזרם המקסימלי דרך האינדוקטור הוא הזרם הקבוע ועוד חצי מהזרם הפיק-לפיק בהחלפת המצבים. התרשים גם מראה את זרם ההפרעה. לפי הנוסחה שצוינה לעיל, הזרם המקסימלי יכול להיחשב כדלקמן: כאשר ton הוא הזמן במצב 1, T הוא מחזור ההחלפה, ו-DC הוא אורך זמן פעולתו של מצב 1.
מעגל המרה סינכרוני

מעגל המרה א-סינכרוני
Rs: התנגדות המשולבת של התנגדות חיישן הזרם וההתנגד התנגדות לווית של האינדוקטור. Vf: ירידת המתח הקדימה של הדיאוד השוטקי. R: התנגדות הכוללת בדרך הפעילה, מחושבת כ-R=Rs+Rm, כאשר היא התנגדות מצב הפעולה של המוספט.

השכנת גרעין אינדוקטור
מגזר הזרם המאודף של האינדוקטור שנחשב, אנו יודעים שאם הזרם דרך האינדוקטור גדל, האינדוקטיוויטי שלו תרד. זה נקבע על ידי התכונות הפיזיות של החומר של הגרעין. מידה של ירידה באינדוקטיוויטי קריטית: אם הירידה תהיה קשה מדי, הממיר לא יפעל בצורה תקינה. הזרם בו האינדוקטור נכשל בגלל זרם מופרז נקרא הזרם של השכבה, פרמטר בסיסי של האינדוקטור.
עקום השכנת של אינדוקטורים במעגלי ממירים הוא חשוב וראוי לתשומת לב. כדי להבין את המושג הזה, אתה יכול לצפות בעקום שמדד למעשה של L לעומת זרם DC.
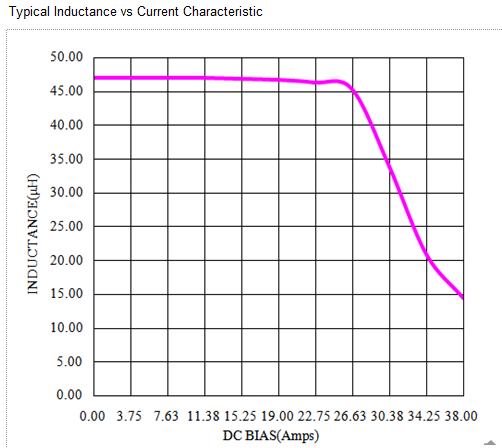
כאשר הזרם עולה מעבר לסף מסוים, האינדוקטיוויטי יורד באופן חדים - תופעה ידועה בשם שכנת. עלייה נוספת בזרם יכולה לגרום לאינדוקטור להיכשל לחלוטין.
עם מאפיין השבעה הזה, אנו יכולים להבין למה כל המ pérdרים מציינים את טווח השינוי של הינדוקטנסית (△L ≤ 20% או 30%) תחת זרם היציאה הקבוע, ולמה מפרט הינדור יש את הפרמטר Isat. מכיוון שהשינוי בזרם הריפל לא משפיע בצורה משמעותית על הינדוקטנסית, מעדיפים בכל התוכניות להקטין את זרם הריפל כמה שיותר, כיוון שהוא משפיע על ריפל המתח היציאה. זה הסיבה שיש תמיד דאגה רבה tentang decree של ההפחתה בהינדוקטנס תחת זרם היציאה הקבוע, בעוד שהינדוקטנס תחת זרם הריפל נעלמת לעתים קרובות מהמפרטים.
בחירת אינדוקטורים מתאימים עבור מזgers חילופיים
אינדוקטורים הם רכיבים נפוצים במעגלים של מזינים חשמליים מתחלפים.因为 יש הפרש פאזה בין הזרם והמתח שלהם, תיאורטית, אובדן האנרגיה הוא אפס. אינדוקטורים מספקים לעתים קרובות את מאגר האנרגיה, ומאופיינים על ידי התכונה של "לעשות מנוגד למשיכת זרם ולשמור על זרם יוצאת", והם נמצאים לעיתים קרובות בשימוש יחד עם קפקרקים במעגלי סינון כניסה ויציאה כדי להישר את הזרם.
כ件 מגנטיים, אינדוקטורים מתקלקלים באופן טבעי בעניין של שפיכת מגנטית. חלק מהיישומים מאפשרים את השפיכה של האינדוקטור, אחרים מאפשרים שפיכה החל מערך תקף מסוים, בעוד שאחרים אוסרים עליה בצורה חמורה, דרושה הבחנה בין מעגלים ספציפיים. ברוב המקרים, האינדוקטורים פועלים ב"אזור הליניארי", שבו ערך האינדוקטיביות נשאר קבוע ולא משתנה עם המתח או הזרם בקצוות. עם זאת, Supplies של כוח מתחלף (switching power) יש להם בעיה לא מבוטלת: הסpiralings של האינדוקטור מביאים לשני פרמטרים מפוזרים (או פרזיטיים). אחד מהם הוא התנגדות הספירלינג בלתי נמנעת והשני הוא הקיבול הפזור הקשור לתהליך הספירלינג ולחומרים. הקיבול הפזור משפיע מעט מאוד בתדרים נמוכים, אך השפעתו נעשית יותר מובהקת ככל שהתדר עולה. כאשר התדר עולה מעל ערך מסוים, האינדוקטור עשוי להראות מאפיינים קיבוליים. אם הקיבול הפזור "נמחש" כאחד קיבול יחיד, המעגל השקול של האינדוקטור חושף את ההתנהגות הקיבולית שלו מעל תדר מסוים.
כאשר מanalysing את מצב הפעולה של אינדקטור במעגל, יש להתחשב במאפיינים הבאים:
1. כאשר זרם I זורם דרך אינדקטור L, האנרגיה שמוחזקת באינדקטור היא: E=0.5 × L× I2(1)
2.ICYCLE של התנודות בהזרמה דרך האינדקטור (הערך השיא-לשיאה של הזרם התנודתי) והמתח על האינדקטור קשור ל:
V=(L × di)\/dt(2), זה מראה שהגודל של ההשתנה בהזרם תלוי בערך האינדוקטנס.
3. אינדקטורים גם עוברים תהליכים של מילוי וריקון. הזרם דרך האינדקטור פרופורציונלי לאינטגרל של המתח (וולט-שניות) עליו. כל עוד המתח על האינדקטור משתנה, גם שיעור השתנה של הזרם di\/dt ישתנה: מתח קדימה גורם להעלאת הזרם באופן ליניארי, בעוד מתח הפוך גורם לו לצנוח באופן ליניארי.
בחירת אינדוקטורים עבור מזger חילופי מסוג Buck
בבחירת אינדוקטור עבור מזger חילופי מסוג Buck, יש לקבוע את המתח הקלט המקסימלי, מתח הפלט, תדר החלפת הכוח, זרם הריפל המקסימלי ומחזור העבודה. ההמשך מתאר את חישוב ערך האינדוקטנס עבור מזger חילופי מסוג Buck. ראשית, נניח שהתדר החלפה הוא 300 kHz, טווח המתח הקלט הוא 12 V ± 10%, זרם הפלט הוא 1 A, והזרם של הריפל המקסימלי הוא 300 mA.
תרשים המעגל של מזger חילופי מסוג Buck
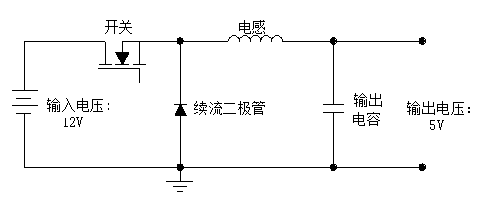
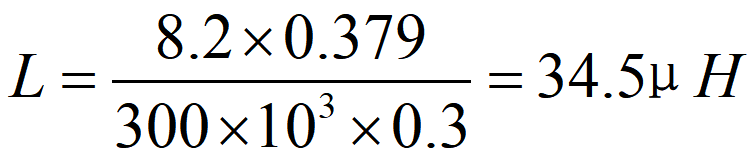
המתח המאксימלי של הכניסה הוא 13.2V, והמחזור המתאים הוא: D=Vo/Vi=5/13.2=0.379(3), כאשר Vo הוא המתח היציאה ו-Vi הוא המתח הכניסה. כאשר טרנזיסטור ההחלפה מופעל, המתח על האינדוקטור הוא: V = Vi - Vo = 8.2 V(4). כאשר טרנזיסטור ההחלפה כבוי, המתח על האינדוקטור הוא: V=-Vo-Vd=-5.3V(5). dt=D/F(6). חילוף משוואות (2), (3) ו-(6) במשוואה (2):
בחירת אינדוקטורים עבור מזgers מסוג העלאה
החשבון של ערך האינדוקטנס עבור מזין חזקה עם מודולציה בדילוג (Boost Switching Power Supply), פרט לשינוי בנוסחה היחסית בין מחזוריות והמתח באינדקטור, כל התהליכים האחרים זהים למתודת החישוב של מזין חזקה מסוג ירידה (Buck Switching Power Supply). נניח שהتردد הדילוגי הוא 300 ק"ה, טווח המתח הקלט הוא 5 וולט ± 10%, הזרם הפלט הוא 500 מ"א, והיעילות היא 80%. הזרם הריפל המקסימלי הוא 450 מ"א, והמחזוריות המתאימה היא: D=1-Vi/Vo=1-5.5/12=0.542(7).
תרשים המעגל של מזין חזקה עם מודולציה בדילוג (Boost Switching Power Supply)
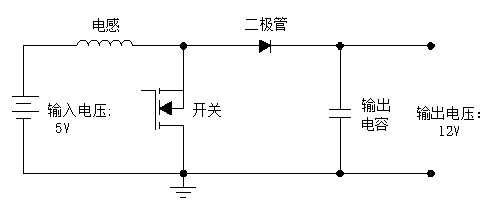
כאשר המفتח מופעל, המתח על האינדקטור הוא: V = Vi = 5.5 וולט (8), כאשר המفتח כבוי, המתח על האינדקטור הוא: V = Vo + Vd - Vi = 6.8 וולט (9), חילוף הנוסחאות 6/7/8 לתוך נוסחה 2 נותן:

שים לב ש, בניגוד למחוללי בק, מחוללי בוסט לא מספקים באופן רציף את זרם העומס מהאינדוקטור. כאשר הטרנזיסטור המחלף מופעל, זרם האינדוקטור זורם דרך המחלף אל הקרקע, בעוד שזרם העומס מסופק על ידי הקפקרת הפלט. לכן, הקפקרת הפלט חייבת לאחסן אנרגיה מספקת כדי להספק את העומס במהלך תקופה זו. עם זאת, כאשר המחלף כבוי, זרם האינדוקטור מספק לא רק את העומס אלא גם מטען את הקפקרת הפלט.
בכלל, עליית ערך האינדוקטיביות מפחיתה את התנודות בפלט אך מדרדרת את התגובה הדינמית של מקור הכוח. לכן, יש לבחור את האינדוקטיביות האופטימלית בהתאם לדרישות היישום הספציפי. תדירויות החלפה גבוהות מאפשרות שימוש בערכים קטנים יותר של אינדוקטיביות, מה שמפחית את גודלו של האינדוקטור ומציל מקום על הלוח PCB. כתוצאה מכך, מקורות כוח חליפה מודרניים נוטים לעלות בתדירויות גבוהות יותר כדי לענות על הביקוש למוצרים אלקטרוניים קטנים יותר.
ניתוח석 ותישארת של מזגנים חשמליים מתחלפים
בנוגע לחוק חוק לנצ': במעגל מופעל על ידי זרם ישר, עקב האינדוקטנס העצמי של הסליל, נוצר מתח אלקטרומוטיבי (EMF) שמנגד את עליית הזרם. לכן, בהתקנת החשמל הראשונה, הזרם במעגל הוא למעשה אפס, וההפרש המתח الكامل קיים על הסליל. הזרם עולה בהדרגה כאשר המתח על הסליל יורד לאפס, מסמן את סיום המצב הזמני. בפעולה של מזגן מתחלף, הסליל לא צריך להכנס למצב שבע כדי לוודא אחסון ומעבר תקין של אנרגיה. סליל בשבע התנהג כמו נתיב ישיר לזרם ישר, מאבד את יכולתו לאחסן אנרגיה, מה שמבטל את פונקציונליות המזגן. כאשר תדירות ההחלפה קבועה, ערך האינדוקטנס חייב להיות גדול מספיק כדי למנוע שבע תחת זרמים שיאים.
קביעת אינדוקטנציה במספקי חשמל מתגברים: בתדרים נמוכים יותר של התחלוקה, מכיוון שזמני ההצבת/הכבות הם ארוכים יותר, נדרש ערך אינדוקטנציה גדול יותר כדי לשמור על יציאה מתמשכת. זה מאפשר לאינדוקטור לאחסן יותר אנרגיה בשדה מגנטי. בנוסף, תקופות החלפה ארוכות יותר גורמות למילוי אנרגיה פחות תכופות, מה שמוביל למגמת זרם קטנה יחסית. העיקרון הזה יכול להסביר על ידי הנוסחה: L = (dt/di) * uL שבו D = Vo/Vi (מחזור עבודה), dt = D/F (על זמן), F = תדירות החלפת, ו di = גליל זרם. עבור ממכפלי בוק, D = 1 - Vi/Vo; עבור ממכפלים דחיפה, D = Vo/Vi. סידור מחדש נותן: L = D * uL / (F * di). כאשר F יורד, L חייב להגדיל באופן פרופורציונלי. לעומת זאת, הגדלת L תוך שמירה על פרמטרים אחרים קבועים מקטין di (גליל זרם). בתדרים גבוהים יותר, הגדלת האינדוקטנציה מגדילה את האימפידנציה, מה שמוביל לעלייה בהפסד כוח ולירידה ביעילות. בדרך כלל, עם תדר קבוע, L גדול יותר מקטין את גלי המוצא אבל מחמיר את התגובה הדינמית (התאמה איטית יותר לשינויים במשקל). לכן, יש לבחור את האינדוקטנציה האופטימלית על בסיס דרישות היישום כדי לאזן את הפחתת הגלישה ואת הביצועים המעבריים.