

Induktor je běžnou energeticky úložnou pasivní součástí v obvodech, která hraje role jako filtrování, zvyšování a snižování v návrhu přepínacích zdrojů. V počáteční fázi návrhu musí inženýři nejen vybrat vhodné hodnoty indukce, ale také zvážit proud, který může induktor unést, DCR spirály, mechanické rozměry, ztráty atd. Pokud nejsou dostatečně obeznámeni s funkcemi induktorů, často budou v návrhu pasivní a spotřebují spoustu času.
Porozumění funkcím induktorů
Induktor je 'L' ve filtru LC na výstupu přepínacího zdroje. V konverzi typu buck je jedno konce induktoru připojeno k výstupnímu DC napětí, zatímco druhý konec se přepíná mezi vstupním napětím a GND podle frekvence přepínání.
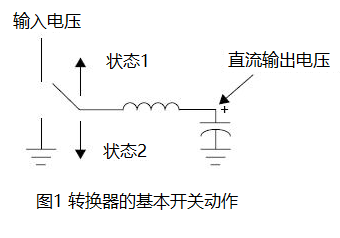
V stavu 1 je induktor připojen k vstupnímu napětí prostřednictvím MOSFETu. V stavu 2 je induktor připojen k GND.
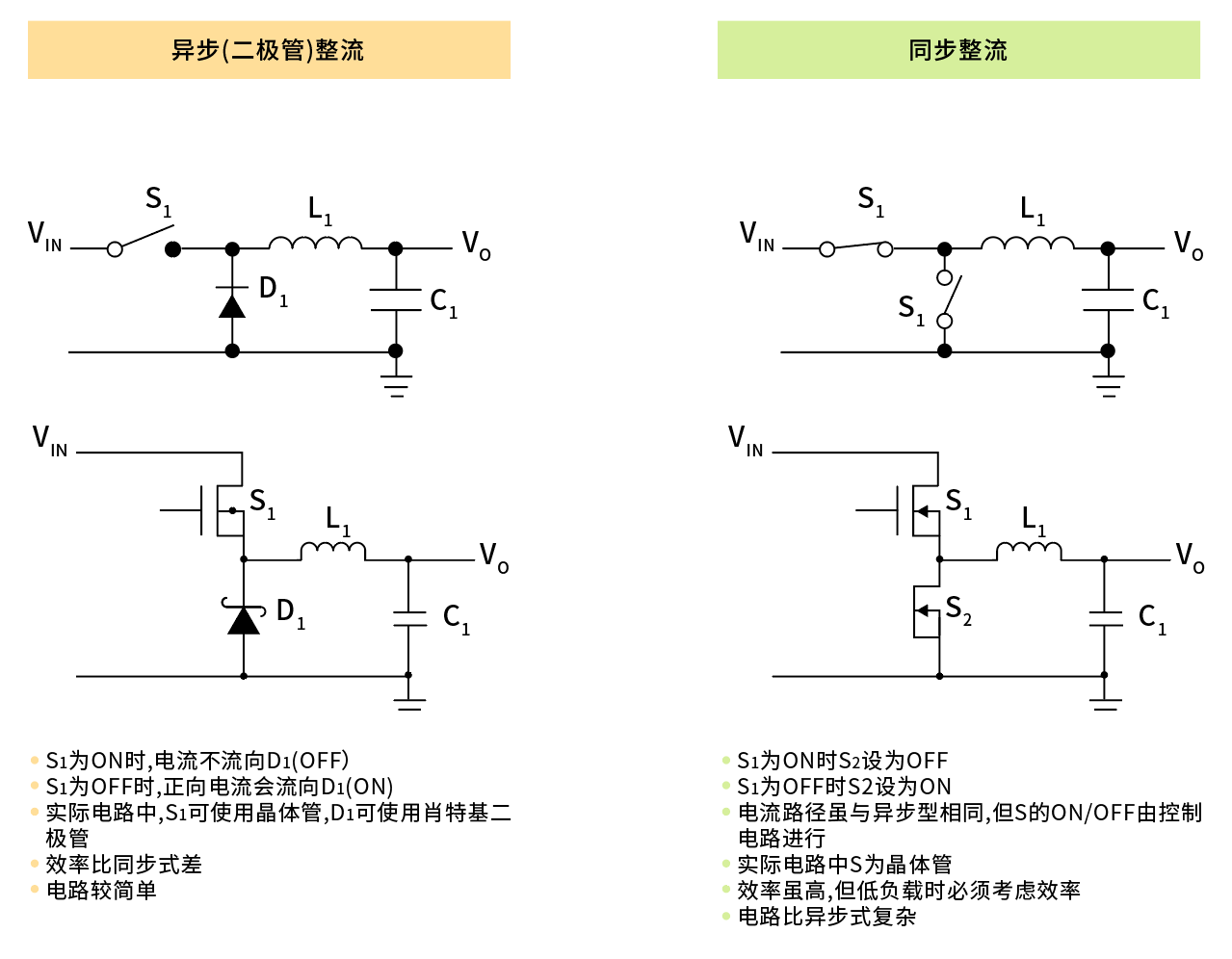
Díky použití tohoto typu regulátoru existují dva způsoby zakotvení induktance: zakotvení prostřednictvím diodu nebo prostřednictvím MOSFET. Pokud je použita první metoda, nazývá se převodník asynchronním režimem. V druhém případě se převodník označuje jako synchronní režim.
Ve stavu 1 je jedno konce induktance připojeno k vstupnímu napětí a druhý konce je připojeno k výstupnímu napětí. Pro snižovací převodník musí být vstupní napětí vyšší než výstupní napětí, takže se mezi indukcí vytvoří dopravní rozdíl napětí.
Ve stavu 2 je konec induktance původně připojený k vstupnímu napětí připojen k masivu. Pro snižovací převodník je nutně výstupní napětí kladným poledníkem, takže se mezi indukcí vytvoří záporný rozdíl napětí.
Vzorec pro výpočet napětí na induktanci
V=L(dI/dt). Protože proud tekoucí induktorem roste, když je napětí na induktoru kladné (Stav 1) a klesá, když je napětí záporné (Stav 2), je průběh proudu induktoru znázorněn na Obrázku 2:
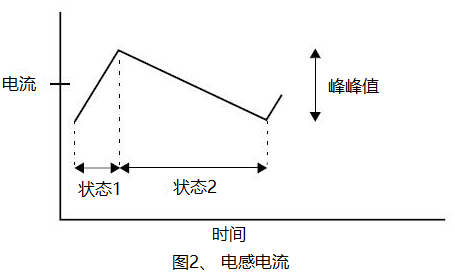
Z výše uvedeného obrázku lze vidět, že maximální proud induktoru je součtem přímého proudu a poloviny vrcholového proudu přepínání. Výše uvedený obrázek také ukazuje pulsační proud. Podle uvedeného vzorce lze vrcholový proud spočítat následovně: kde ton je čas v Stavu 1, T je období přepínání a DC je stupeň využití Stavu 1.
Synchronní konverzní obvod

Asynchronní konverzní obvod
Rs: Kombinovaný odpor proudového senzoru a odporu vodiče induktoru. Vf: Přední propustné napětí Schottkyho diodu. R: Celkový odpor v cestě vedení, který je spočítán jako R=Rs+Rm, kde je odpor MOSFETu ve stavu zapnutí.

Nasytění jádra indukce
Z vypočítaného maximálního proudu induktory víme, že při zvýšení proudu protékajícího induktorem bude klesat jeho indukčnost. Toto je určeno fyzikálními vlastnostmi materiálu jádra. Míra poklesu indukčnosti je kritická: pokud bude pokles příliš velký, převodník nebude normálně fungovat. Proud, při kterém selže induktor kvůli příliš velkému proudovému toku, se nazývá saturace proud, což je základní parametr induktoru.
Křivka nasytění mocných induktorů v obvodech převodníků je důležitá a stojí za pozornost. K porozumění tohoto konceptu můžete sledovat skutečně změřenou křivku L ve funkci DC proudu.
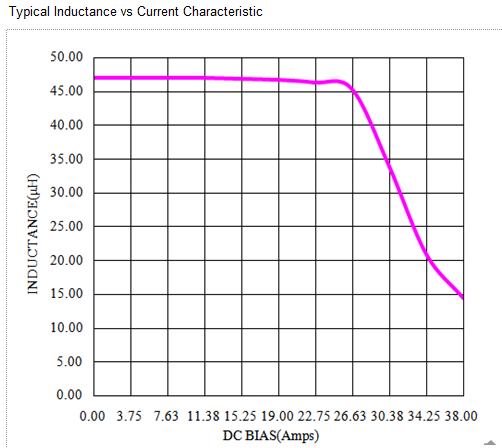
Když proud přesáhne určitou hranici, indukčnost rychle klesá – jev známý jako nasytění. Další zvýšení proudu může vést ke kompletnímu selhání induktoru.
S touto charakteristikou nasycení můžeme pochopit, proč všechny konverze uvedou rozsah změny hodnoty indukce (△L ≤ 20 % nebo 30 %) při proudě DC výstupního proudu a proč je v specifikaci induktivity zahrnut parametr Isat. Protože změna kolísavého proudu nemá významný vliv na indukci, je ve všech aplikacích požadováno minimalizovat kolísavý proud co nejvíce, protože ovlivňuje kolísání výstupního napětí. Proto je vždy velká starost o stupeň oslabení indukce při DC výstupním proudu, zatímco indukce při kolísavém proudu je často v specifikacích opomíjena.
Výběr vhodných induktorů pro přepínací zdroje
Induktory jsou běžně používané součástky v přepínacích zdrojích napájení. V důsledku fázového rozdílu mezi proudem a napětím je teoreticky ztráta nulová. Induktory často slouží jako prvkyně úložiště energie, mají charakteristiku "odporující přicházejícímu a udržující odcházející" a často se používají společně s kondenzátory ve vstupních a výstupních filtracích k vyhlazení proudu.
Jako magnetické součástky čelí induktory přirozeně problému magnetické nasycení. Některé aplikace umožňují nasycení induktoru, jiné dovolují nasycení od určité hodnoty proudu, zatímco další jej striktně zakazují, což vyžaduje rozlišování v konkrétních obvodech. Ve většině případů působí induktory v „lineárním oblasti“, kde zůstává jejich indukčnost konstantní a nemění se s napětím nebo proudem na terminálech. Nicméně mají převodní zdroje s pulzním regulátorem nepřehlédnutelný problém: spirály induktoru zavádějí dva distribuované (nebo parazitní) parametry. Prvním je nevyhnutelný odpor spirály, druhým pak distribuovaná kapacita spojená s procesem vinutí a materiálem. Parazitní kapacita má minimální vliv na nízkých frekvencích, ale její účinek se stává stále patrnějším s rostoucí frekvencí. Když frekvence překročí určitou hranici, může induktor projevit kapacitní charakteristiky. Pokud je parazitní kapacita „shozena“ jako jediný kondenzátor, ekvivalentní obvod induktoru odhaluje jeho kapacitní chování za určité frekvence.
Při analýze provozního stavu induktance v obvodu je třeba zohlednit následující charakteristiky:
1. Když proud I protéká induktancí L, energie uložená v induktanci je: E=0.5 × L× I2(1)
2. V přepínacím cyklu je vztah mezi změnou proudu v induktanci (hodnota vrcholového kmitočtu proudového kolísání) a napětím na induktanci:
V=(L × di)/dt(2), Což ukazuje, že velikost proudového kolísání je spojena s hodnotou indukce.
3. Induktance také prochází procesy nabíjení a vybíjení. Proud tekoucí induktancí je úměrný integrálu napětí (volt-sekund) přes ni. Stačí změna napětí na induktanci, aby se také změnila rychlost změny proudu di/dt: vpřed směřující napětí způsobí lineární nárůst proudu, zatímco opačné napětí způsobí jeho lineární pokles.
Výběr induktorů pro snižující převodníky napájení
Při výběru induktoru pro snižující převodník napájení je nutné určit maximální vstupní napětí, výstupní napětí, frekvenci přepínání, maximální pulsační proud a cyklus pracovního času. Následující text popisuje výpočet hodnoty indukce pro snižující převodník napájení. Za předpokladu, že frekvence přepínání je 300 kHz, rozsah vstupního napětí je 12 V ± 10%, výstupní proud je 1 A a maximální pulsační proud je 300 mA.
Schéma spojení snižujícího převodníku napájení
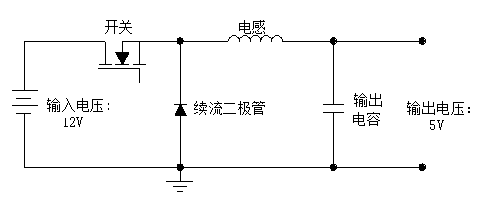
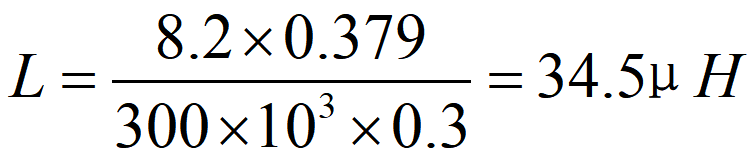
Maximální vstupní napětí je 13,2V a odpovídající stupeň využití je: D=Vo/Vi=5/13,2=0,379(3), kde Vo je výstupní napětí a Vi je vstupní napětí. Když je přepínací tranzistor zapnutý, je napětí na indukční smyčce: V = Vi - Vo = 8,2 V(4). Když je přepínací tranzistor vypnutý, je napětí na indukční smyčce: V=-Vo-Vd=-5,3V(5).dt=D/F(6). Dosazením rovnic (2), (3) a (6) do rovnice (2):
Výběr induktorů pro zvýšovací převodníky s přepínacími zdroji elektrického proudu
Výpočet hodnoty indukčnosti pro boostovací přepínací zdroj napájení, kromě změny vztahového vzorce mezi cyklickou frekvencí a napětím na induktor, jsou ostatní procesy stejné jako u výpočtu metody buck přepínacího zdroje napájení. Předpokládejme, že přepínací frekvence je 300 kHz, rozsah vstupního napětí je 5 V ± 10%, výstupní proud je 500 mA, a účinnost je 80%, maximální pruhový proud je 450 mA, a odpovídající cyklická frekvence je: D=1-Vi/Vo=1-5.5/12=0.542(7).
Schéma obvodu boostovacího přepínacího zdroje napájení
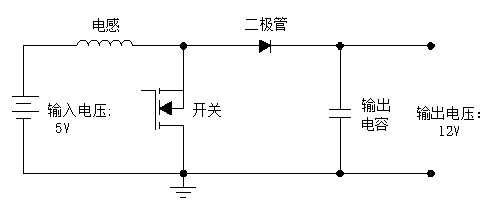
Když je spínač zapnutý, napětí na induktor je: V = Vi = 5.5 V (8), Když je spínač vypnutý, napětí na induktor je: V = Vo + Vd - Vi = 6.8 V (9), Dosazením vzorců 6/7/8 do vzorce 2 dostaneme:

Všimněte si, že na rozdíl od step-down převodníků (buck converters) step-up převodníky (boost converters) nezajišťují nepřetržitý proud do zátěže z induktoru. Když je spínací tranzistor v provozu, proud induktoru protéká přes spínač k zemi, zatímco proud pro zátěž poskytuje výstupní kondenzátor. Proto musí výstupní kondenzátor uchovávat dostatečnou energii na to, aby mohl zásobovat zátěž během tohoto období. Nicméně, když je spínač vypnutý, proud induktoru nejen zásobuje zátěž, ale také nabíjí výstupní kondenzátor.
Obvykle zvýšení hodnoty indukce snižuje výstupní pulsační napětí, ale zhoršuje dynamickou odpověď zdroje. Proto by měla být optimální indukce vybrána na základě konkrétních požadavků aplikace. Vyšší frekvence spínání umožňují nižší hodnoty indukce, což snižuje velikost induktoru a ušetří místo na desce PCB. Důsledně se moderní spínací zdroje staví na vyšší frekvence, aby vyhověly požadavkům na menší elektronické produkty.
Analýza a aplikace přepínačových zdrojů napájení
Pokud jde o Lenzův zákon: V obvodu napájeném proudem s převahou DC je kvůli vlastní indukci spirály vyvolán elektromotorický účinek (EMF), který brání nárůstu proudu. Proto je v okamžiku zapnutí efektivně proudnost obvodu nulová a celé klesnutí napětí probíhá na spirále. Proud pak postupně narůstá, zatímco napětí na spirále klesá na nulu, což označuje konec přechodového stavu. Při provozu přepínačového převodníku musí být induktor udržen mimo saturaci pro efektivní úložení a přenos energie. Saturovaný induktor se chová jako přímá cesta pro DC proud, přičemž ztrácí schopnost úložit energii, což podkopává funkčnost převodníku. Když je přepínací frekvence pevná, hodnota indukce musí být dostatečně velká, aby se zabránilo saturaci za vrcholových proudů.
Určení indukčnosti v přepínacích zdrojích: Při nižších frekvencích přepínání, kdy jsou doby zapnutí/vypnutí delší, je potřeba větší hodnota indukčnosti pro udržení spojitého výstupu. To umožňuje induktorovi uložit více magnetické energie. Navíc, delší období přepínání vedou ke méně častému doplňování energie, což způsobuje relativně menší pulsační proud. Tento princip lze vysvětlit pomocí vzorce: L = (dt/di) * uL, kde D = Vo/Vi (úsek zapnutí), dt = D/F (doba zapnutí), F = frekvence přepínání a di = pulsační proud. Pro snižující převodníky (buck converters) je D = 1 - Vi/Vo; pro zvyšující převodníky (boost converters) je D = Vo/Vi. Po úpravě dostaneme: L = D * uL / (F * di). Když F klesá, musí L narůstat úměrně. Naopak, zvětšení L s ostatními parametry konstantními snižuje di (pulsační proud). Při vyšších frekvencích zvýšení indukčnosti zvyšuje impedanci, což vedlo ke zvýšeným ztrátám výkonu a snížené účinnosti. Obecně platí, že při pevné frekvenci větší L snižuje pulsační výstup, ale zhoršuje dynamickou odezvu (pomalejší přizpůsobení změnám zatížení). Proto by měla být optimální indukčnost vybrána na základě požadavků aplikace pro vyrovnaní snížení pulsačního proudu a dočasné výkonové vlastnosti.