

Rostoucí poptávka po automatizaci v průmyslových a služebních odvětvích podporuje rychlý vývoj humanoidních robotů. S nárůstem počtu stupňů volnosti (DOF) a zlepšováním rychlosti reakce na prostředí se humanoidní roboty stávají sofistikovanějšími, což jim umožňuje více realisticky napodobovat lidské pohyby. Vyšší počet stupňů volnosti znamená, že humanoidní roboty vyžadují více pohonů motorů, a tlumivky hrají důležitou roli v systémech řízení motorů, správy energie a zpracování signálů humanoidních robotů.

1- Hlavní aplikace tlumivek v humanoidních robotech
Tlumivky jsou v humanoidních robotech používány hlavně v pohonech motorů, správě energie a zpracování signálů.
Pohon motoru: Na trhu se vyšší třídy humanoidních robotů obvykle vyznačují 40 až 50 článkovými motory, které určují volnost a pružnost pohybu robota. Induktor pohání motor hladké rotace prostřednictvím akumulace energie a vyrovnání proudu, čímž pomáhá řídicímu systému motoru humanoidního robota dosáhnout pohybu kloubů, úpravy polohy a dynamické rovnováhy. Pohony motorů a zátěže s vysokým výkonem vyžadují induktory s vysokými charakteristikami nasycení proudem a vysokou nosností proudů, aby zvládly okamžité kolísání proudu. Současně je nutné snížit ztráty, aby se zvýšila účinnost systému a prodloužila životnost baterie.
Správa energie: Indukčnosti jsou základními součástkami DC-DC měničů (například buck a boost obvody) v systémech správy energie, které poskytují stabilní napájení při různých napětích pro AI procesory, senzory, komunikační moduly atd., a optimalizují distribuci a účinnost přeměny energie. Vyžadují se nízký odpor stejnosměrného proudu (DCR), vysoká účinnost přeměny za účelem snížení ztrát energie, vysoký nasycovací proud a dobrá teplotní stabilita.
Zpracování signálu: V systémech zpracování signálů se indukčnosti primárně používají k potlačení šumu ve vysokých frekvencích a elektromagnetické interference (EMI), čímž zajišťují čistotu signálu. Například v percepčním systému pomáhají realizovat vnímání a interaktivní odezvu humanoidních robotů na okolní prostředí. V komunikačních a řídicích systémech indukčnosti využívají EMI návrh k zajištění odolnosti proti rušení radarových, kamerových, bezdrátových komunikačních a dalších modulů a tím zvyšují provozní stabilitu zařízení.
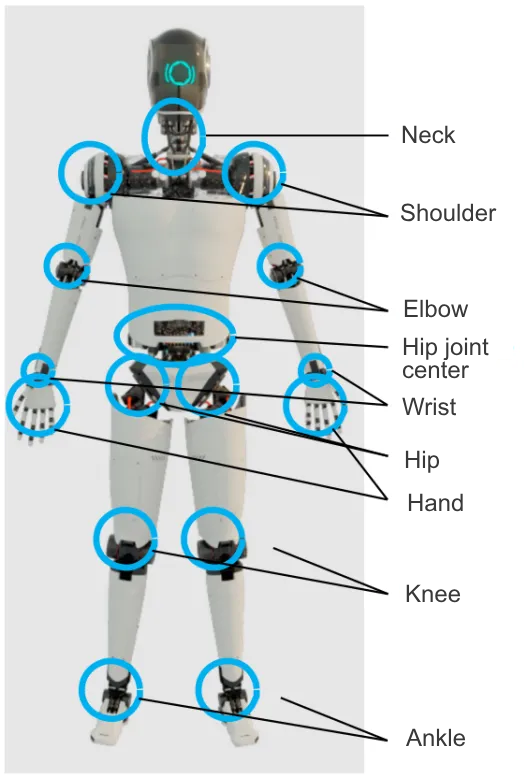
Obrázek 1: Hlavní umístění společného motoru humanoidního robota (obrázek od TI)
2 – Poptávka po cívkách pro humanoidní roboty
Elektronický systém humanoidních robotů je složitý a pro dosažení přesného řízení pohybu a spolehlivé komunikace není možné obejít se bez podpory základních komponent, jako jsou cívky. Technické vlastnosti humanoidních robotů také určují jejich vysoké nároky na výkon a konstrukční uspořádání produktů cívek. Tyto požadavky jsou hlavně následující:
2.1 Miniaturizace a vysoká hustota výkonu
Vnitřní prostor humanoidních robotů je extrémně kompaktní, integruje velké množství motorů, výpočetních jednotek (CPU/GPU), senzorů atd., a proto musí být deska napájecího obvodu (např. POL, konvertor bodu zatížení) miniaturizována. Cívky musí být malé a lehké, aby odpovídaly kompaktním konstrukčním řešením, a zároveň musí mít vysokou hustotu výkonu, aby dosáhly vysokého výkonu při malé ploše. Cívky s odlévanou nebo stíněnou konstrukcí vykazují velké proudy nasycení a teplotní zvýšení proudů při malých rozměrech, což je nezbytné pro dosažení vysokého výkonu v omezeném prostoru.
2.2 Silný odpor proti elektromagnetickému rušení
Vnitřní elektromagnetické prostředí robotů je složité, s vysokorychlostními digitálními obvody, silným spínacím šumem od řadičů motorů a citlivými senzory (např. IMU a kamery). Použití nechráněných cívek vygeneruje silné magnetické pole a stane se zdrojem elektromagnetické interference, což vážně ovlivní stabilitu výstupů senzorů a řídicího systému. Chráněné cívky mají minimální únik magnetického toku, čímž efektivně snižují elektromagnetickou interferenci a zajišťují spolehlivý provoz ostatních součástek v systému. Vylisované cívky, výkonové cívky pro vysoké proudy a další výkonové cívky s magneticky stíněnou konstrukcí jsou proto ideálnější volbou.
2.3 Vysoký nasycovací proud
Dynamické zatížení robota se mění výrazně, například při náhlém startu, běhu nebo zvedání těžkých předmětů, kdy okamžitě prudce stoupá proud motoru a výpočetní jednotky. Induktor musí být schopen vyhnout se magnetickému nasycení při vysokých proudech (tj. hodnota indukčnosti se neprudce snižuje), jinak dojde k ztrátě kontroly výkonové smyčky, kolapsu systémového napětí a restartu. Indukčnost proto musí mít charakteristiky „měkkého nasycení“, což znamená, že při přibližování k nasycovacímu proudu se hodnota indukčnosti snižuje postupně, nikoli skokově. To poskytuje výkonovému řídicímu systému určitou rezervu a zvyšuje spolehlivost systému.
2.4 Silné vlastnosti odolnosti proti vibracím a nárazům
Humanoidní roboty se často pohybují, vytvářejí hodně mechanického otřesu a induktor musí být odolný vůči vibracím a nárazům, jeho pájové spoje musí být pevné a skříň i vnitřní cívka musí odolávat mechanickému namáhání. Induktor ve formě odlité konstrukce plně fixuje cívku uvnitř magnetického materiálu, což zajišťuje extrémně vysokou mechanickou pevnost a velmi silnou odolnost vůči nárazům, proto je široce využíván v systémech humanoidních robotů.
2.5 Přizpůsobení se prostředí s vysokou frekvencí a vysokou teplotou
Induktor musí mít dobré vlastnosti při vysokých frekvencích, efektivně potlačovat vysokofrekvenční rušení, snižovat vlnivost a šum a udržovat nízké ztráty energie při vysokých frekvencích, čímž zvyšuje účinnost přeměny.
Kromě toho by měl induktor být schopen udržet hodnotu indukčnosti stabilní ve vysoké teplotě, mít malý pokles hodnoty Q a neměl by se snadno zhoršovat jeho výkon, aby byla zajištěna spolehlivost indukčních vlastností robota při dlouhodobém provozu.
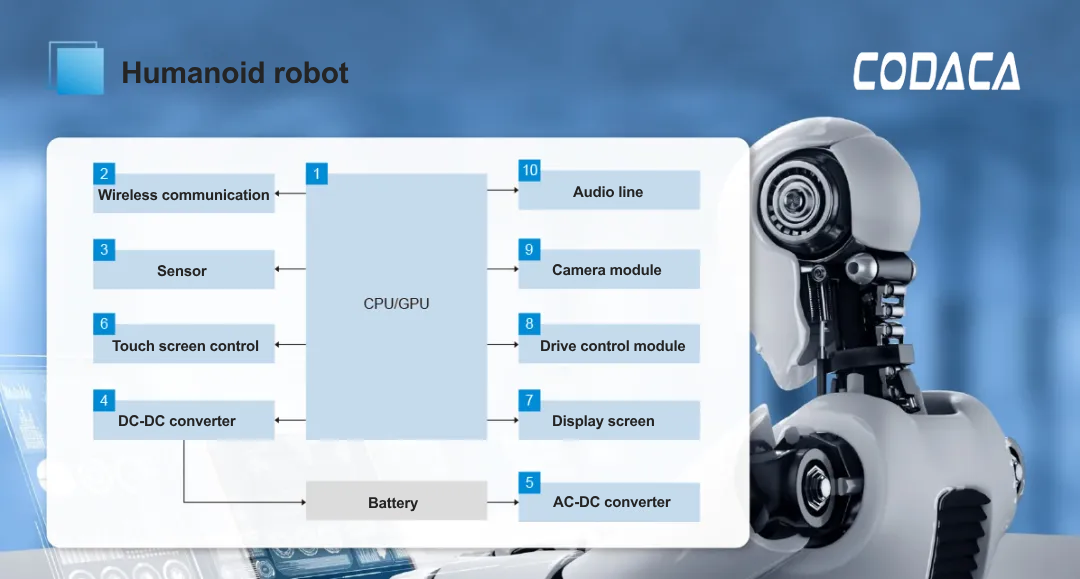
Obr. 2 Využití induktoru v humanoidním robotu
3- Codaca řešení s induktorem pro humanoidní roboty
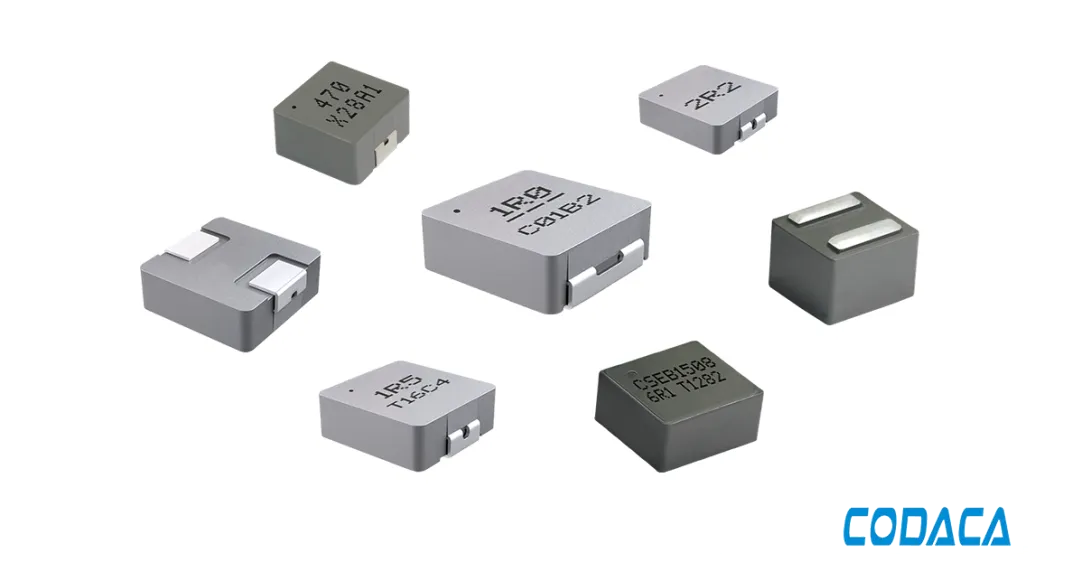
V aplikacích, jako jsou humanoidní roboti, které kombinují vysokou hustotu výkonu, vysokou účinnost, vysokou spolehlivost, komplexní prostředí EMI a náročné mechanické podmínky, se staly induktory s vysokým proudem, stíněné, s jádrem z slitinového prášku nepopiratelnou mainstreamovou volbou v obvodech napájení, zejména v napájecích zdrojích POL pro klíčové výpočetní jednotky a pohony kloubů motorů, díky svým komplexním výhodám výkonu. Jejich návrh dokonale vyvažuje tři klíčové výzvy: výkon, velikost a spolehlivost.
Prostřednictvím nezávislého výzkumu a technologických inovací poskytuje Codaca přizpůsobená řešení cívek pro humanoidní roboty a společnost uvedla na trh více kategorií a modelů produktů, jako jsou cívky s magnetickým stíněním pro vysoký proud, tenké a lehké zalité cívky a beznábojové tlumivky. Může poskytovat různé elektrické vlastnosti, které splňují vysoké požadavky na výkon cívek v různých aplikacích humanoidních robotů, a je široce využívána v komunikačních a navigačních modulech robotů, výkonových modulech, modulech řízení motorů, řídicích deskách robotů a dalších modulech.
3.1 Kompaktní cívka pro vysoký proud
S výkonem nejvýše 50 W se primárně používají v modulech DC-DC pro pohon motorů a systémy správy energie humanoidních robotů. Vysokoproudá cívka využívá nízkoztrátové jádro z kovového magnetického prášku, které bylo nezávisle vyvinuto společností Codaca a které disponuje vlastnostmi vysokého saturace proudu, nízkých ztrát, vysoké účinnosti přeměny a vysoké provozní teploty, čímž zajišťuje výkon a odolnost humanoidních robotů. Vysokoproudá cívka může dosáhnout až 422 A a provozní teplota až 170 °C. Zároveň produkt využívá stíněnou magnetickou konstrukci, která poskytuje silný odpor proti elektromagnetickému rušení. Plně tak splňuje požadavky humanoidních robotů na vysoký saturaci proudu, vysokou provozní teplotu a nízké elektromagnetické rušení.
Doporučené modely: CSBX , CSBA , CSCM , CSUT , CSCIL , atd.

3.2 Tenké a lehké formované cívky
Lité cívky se primárně používají v modulech zobrazování humanoidních robotů, modulu dotykového ovládání, DC-DC modulech atd. Formované výkonové tlumivky využívají nízkou ztrátovou slitinovou moučku nezávisle vyvinutou společností CODACA, která má nízké ztráty, vysokou účinnost, široké frekvenční využití a může snížit hlučnost na extrémně nízkou úroveň. Nabízí tenký a lehký design (minimální velikost 2 mm), šetří místo na desce plošných spojů, je vhodný pro vysokohustotní montáž a má silnou odolnost proti mechanickému rázu a vibracím (odolnost proti vibracím přesahuje 10G), čímž splňuje požadavky humanoidních robotů na vysokou výkonovou hustotu a vysokou stabilitu.
Doporučené modely: CSAG , CSAC , CSAB , CSEB , CSHB , atd.
3,3 SMD výkonová cívka
Codaca SMD výkonové cívky se primárně používají v kamerových modulech, audio modulech, DC-DC modulech atd., a dokáží tak splnit požadavky na malou velikost cívky, velký proud a vysokou účinnost přeměny atd.
Doporučené modely: SPRHS , Česká republika , CRHSM , VCRHS , SPQ , atd.

Jako vedoucí dodavatel v oblasti technologie magnetických komponentů se Codaca Electronics zaměřuje na vývoj cívek po dobu 24 let a inženýři mohou vybrat vhodnou hodnotu indukčnosti, jmenovitý proud, spínací frekvenci, velikost produktu atd. podle konkrétních výkonových požadavků jednotlivých subsystémů humanoidního robota pro cívky. Další podrobné informace poskytne prodejní personál Codaca.