
Schnelllinks

Die steigende Nachfrage nach Automatisierung in der verarbeitenden Industrie und im Dienstleistungssektor treibt die rasante Entwicklung humanoider Roboter voran. Mit der Zunahme an Freiheitsgraden (DOF) und der Verbesserung der Reaktionsgeschwindigkeit auf die Umwelt sind humanoide Roboter immer komplexer geworden und können menschliche Bewegungen realer simulieren. Höhere Freiheitsgrade bedeuten, dass humanoide Roboter mehr Motorantriebe benötigen, und Induktoren spielen eine wichtige Rolle in den Motorsteuerungs-, Energiemanagement- und Signalverarbeitungssystemen humanoider Roboter.

1- Hauptanwendungen von Induktoren in humanoiden Robotern
Induktoren werden in humanoiden Robotern hauptsächlich in Motorantrieben, Energiemanagement und Signalverarbeitung eingesetzt.
Motorantrieb: Hochwertige humanoide Roboter auf dem Markt verfügen in der Regel über 40 bis 50 Gelenk-Motoren, die die Bewegungsfreiheit und Flexibilität des Roboters bestimmen. Die Drosselspule treibt den Motor durch Energie speichernde und den Strom glättende Wirkung sanft an, wodurch das Motorsteuerungssystem des humanoiden Roboters Gelenkbewegungen, Lageregelung und dynamisches Gleichgewicht erreichen kann. Motorantriebe und hohe Leistungsbelastungen erfordern Induktivitäten mit hohen Sättigungsstromkennwerten und hoher Stromtragfähigkeit, um mit augenblicklichen Stromschwankungen umzugehen. Gleichzeitig ist es notwendig, Verluste zu reduzieren, um die Systemeffizienz zu verbessern und die Batterielaufzeit zu verlängern.
Energieverwaltung: Drosseln sind die Kernelemente von Gleichspannungswandlern (wie Abwärtswandler- und Aufwärtswandler-Schaltungen) in Stromversorgungssystemen und stellen für KI-Prozessoren, Sensoren, Kommunikationsmodule usw. eine stabile Stromversorgung bei verschiedenen Spannungen bereit, wodurch die Energieverteilung und Umwandlungseffizienz optimiert wird. Es werden geringer Gleichstromwiderstand (DCR), hoher Wirkungsgrad zur Verringerung von Leistungsverlusten, hoher Sättigungsstrom und gute Temperaturstabilität gefordert.
Signalverarbeitung: In Signalverarbeitungssystemen werden Drosseln hauptsächlich zur Unterdrückung von hochfrequentem Rauschen und elektromagnetischen Störungen (EMI) eingesetzt, um die Signalreinheit sicherzustellen. Beispielsweise trägt dies im Wahrnehmungssystem dazu bei, die Umwelterkennung und interaktive Rückmeldung humanoider Roboter zu realisieren. In Kommunikations- und Steuersystemen verwenden Drosseln EMI-Designs, um die Störfestigkeit von Radar-, Kamera- und Funkkommunikationsmodulen sicherzustellen und die Betriebsstabilität der Geräte zu verbessern.
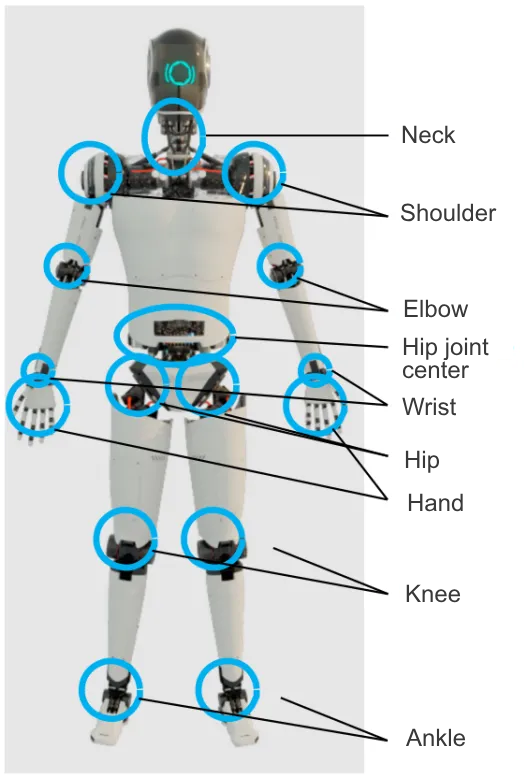
Abbildung 1: Die Hauptposition des Gelenkmotors des humanoiden Roboters (Bild von TI)
2- Die Nachfrage nach Induktivitäten für humanoide Roboter
Das elektronische System humanoider Roboter ist komplex, und um eine präzise Bewegungssteuerung und zuverlässige Kommunikation zu erreichen, ist es untrennbar mit der Unterstützung grundlegender Komponenten wie Induktivitäten verbunden. Die technischen Eigenschaften humanoider Roboter bestimmen auch deren hohe Anforderungen an die Leistung und konstruktive Gestaltung von Induktivitätsprodukten. Die Anforderungen sind hauptsächlich folgende:
2.1 Miniaturisierung und hohe Leistungsdichte
Der Innenraum humanoider Roboter ist äußerst kompakt und integriert eine Vielzahl von Motoren, Recheneinheiten (CPUs/GPUs), Sensoren usw. Die Stromversorgungsplatine (wie POL, Point-of-Load-Wandler) muss daher miniaturisiert sein. Drosseln müssen klein und leicht sein, um in kompakte Baustrukturen zu passen, und gleichzeitig eine hohe Leistungsdichte aufweisen, um hohe Leistung bei geringer Baugröße bereitzustellen. Drosseln mit formgegossener oder abgeschirmter Bauweise können sehr hohe Sättigungsströme und Temperaturanstiegsströme bei geringer physischer Größe verkraften, was entscheidend ist, um hohe Leistungsabgabe bei begrenztem Platzangebot zu erreichen.
2.2 Starke elektromagnetische Störfestigkeit
Das interne elektromagnetische Umfeld von Robotern ist komplex, mit Hochgeschwindigkeits-Digital-Schaltungen, starkem Schaltstromrauschen von Motorsteuerungen und empfindlichen Sensoren (wie IMUs und Kameras). Die Verwendung ungeschirmter Drosseln erzeugt ein starkes Magnetfeld und wird zu einer Quelle elektromagnetischer Störungen, was die Stabilität der Sensorwerte und des Steuersystems erheblich beeinträchtigen kann. Geschirmte Drosseln weisen eine minimale magnetische Streuung auf und reduzieren dadurch elektromagnetische Störungen wirksam, wodurch der zuverlässige Betrieb anderer Komponenten im System gewährleistet bleibt. Daher sind formgegossene Drosseln, Leistungsinduktivitäten mit hohem Strom sowie andere Leistungsinduktivitäten mit magnetisch geschirmten Strukturen die besseren Wahl.
2.3 Hoher Sättigungsstrom
Die dynamische Belastung des Roboters ändert sich drastisch, beispielsweise beim plötzlichen Anfahren, Laufen oder Heben schwerer Gegenstände, wodurch der Strom in Motor und Recheneinheit sofort stark ansteigt. Die Drossel muss in der Lage sein, bei hohen Strömen eine magnetische Sättigung zu vermeiden (d. h., der Induktivitätswert fällt nicht stark ab), da sonst die Stromversorgungsschleife außer Kontrolle gerät, was zum Zusammenbruch der Systemspannung und einem Neustart führen kann. Daher muss die Induktivität die Eigenschaft der „weichen Sättigung“ aufweisen, das heißt, beim Annähern an den Sättigungsstrom nimmt der Induktivitätswert langsam ab, statt abrupt abzufallen. Dies bietet eine Pufferwirkung für das Stromregelsystem und erhöht die Zuverlässigkeit des Systems.
2.4 Starke Vibrations- und Stoßfestigkeit
Humanoide Roboter bewegen sich häufig und weisen starke mechanische Vibrationen auf, weshalb die Spule vibrations- und schockresistent sein muss. Die Lötstellen sollten fest sein, und der Gehäuse sowie die innere Spule müssen mechanische Belastungen aushalten können. Die Spule der gegossenen Struktur wird vollständig in das magnetische Material eingegossen, wodurch die mechanische Festigkeit äußerst hoch ist und eine sehr starke Schockresistenz aufweist, weshalb sie häufig in humanoiden Robotersystemen eingesetzt wird.
2.5 Anpassung an hochfrequente und hochtemperaturbelastete Umgebungen
Die Spule muss über gute Hochfrequenz-Eigenschaften verfügen, um hochfrequente Störungen effektiv zu unterdrücken, Welligkeit und Geräusche zu reduzieren und bei hohen Frequenzen geringe Energieverluste aufzuweisen, um die Umwandlungseffizienz zu verbessern.
Darüber hinaus sollte die Drossel in der Lage sein, den Induktivitätswert in einer Umgebung mit hoher Temperatur stabil zu halten, der Q-Wert sollte nur geringfügig abnehmen und die Leistung sich nicht leicht verschlechtern, um sicherzustellen, dass die Induktionsleistung des Roboters bei langfristigem Betrieb zuverlässig bleibt.
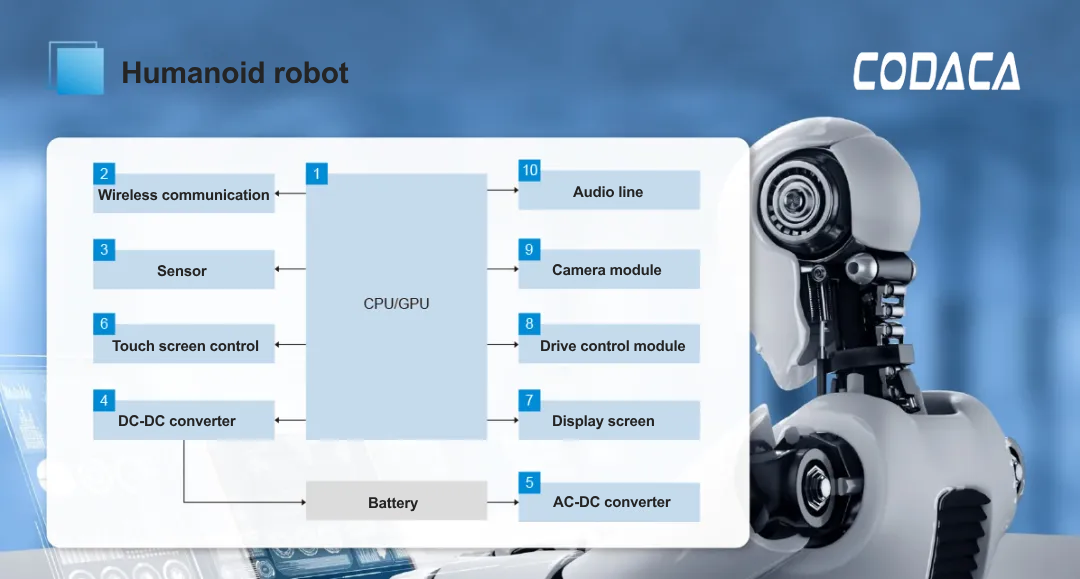
Abb. 2 Anwendung der Drossel in humanoiden Robotern
3- Codaca drossellösung für humanoide Roboter
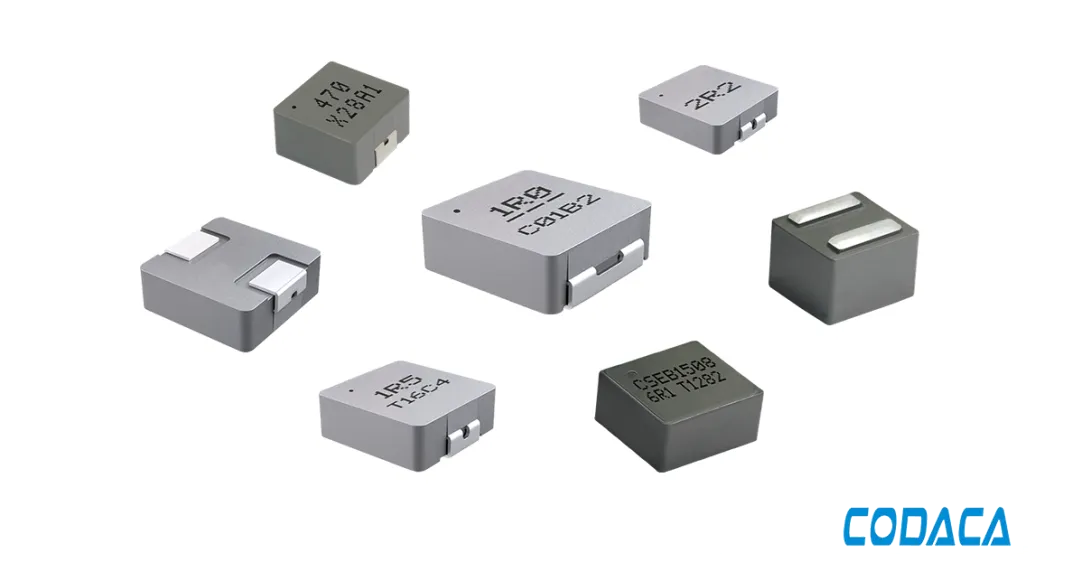
In Anwendungen wie humanoiden Robotern, die hohe Leistungsdichte, hohe Effizienz, hohe Zuverlässigkeit, komplexe EMI-Umgebungen und anspruchsvolle mechanische Bedingungen kombinieren, haben stromfeste, abgeschirmte Drosseln mit Legierungs-Pulverkern aufgrund ihrer umfassenden Leistungsvorteile die unbestrittene Standardwahl in Stromversorgungsschaltungen werden, insbesondere für POL-Stromversorgungen von zentralen Recheneinheiten und Antriebsmotoren der Gelenke. Ihr Design balanciert perfekt die drei Kernherausforderungen Leistung, Baugröße und Zuverlässigkeit.
Durch unabhängige Forschung und Entwicklung sowie technologische Innovation bietet Codaca adaptive Induktionslösungen für humanoide Roboter an. Das Unternehmen hat mehrere Kategorien und Modelle von Produkten wie magnetisch abgeschirmte Hochstrom-Leistungsinduktoren, dünne und leichte formgegossene Induktoren sowie Gleichtakt-Drosseln auf den Markt gebracht. Diese können unterschiedliche elektrische Eigenschaften bereitstellen, um die Leistungsanforderungen von Induktoren in verschiedenen Anwendungsszenarien humanoider Roboter zu erfüllen, und werden weit verbreitet in Kommunikations- und Navigationsmodulen, Stromversorgungsmodulen, Motorantriebsmodulen, Roboter-Steuerplatinen und anderen Modulen eingesetzt.
3.1 Kompakter Hochstrom-Leistungsinduktor
Mit einem Stromgehalt von mehr als 50 W werden hauptsächlich in DC-DC-Modulen von Antriebsmotoren und Stromversorgungssystemen humanoider Roboter eingesetzt. Die Starkstromdrossel verwendet einen verlustarmen Metallpulverkern aus einem von Codaca eigenständig entwickelten Material, das sich durch hohe Sättigungsstromstärke, geringe Verluste, hohe Wirkungsgrade und hohe Betriebstemperaturen auszeichnet und somit die Leistungsfähigkeit und Ausdauer humanoider Roboter sicherstellt. Der Dauerstrom der Starkstromdrossel kann bis zu 422 A betragen, die Betriebstemperatur bis zu 170 °C. Gleichzeitig verfügt das Produkt über eine magnetisch abgeschirmte Bauform, die eine starke elektromagnetische Störfestigkeit bietet. Damit werden die Anforderungen humanoider Roboter an hohe Sättigungsstromstärken, hohe Betriebstemperaturen und geringe elektromagnetische Störungen vollständig erfüllt.
Empfohlene Modelle: CSBX , CSBA , CSCM , CSUT , CSCIL , usw.

3.2 Dünne und leichte Formdrosseln
Geformte Induktivitäten werden hauptsächlich in Displaymodulen für humanoide Roboter, Touchscreen-Steuerungsmodulen, DC-DC-Modulen usw. eingesetzt. Die formgegossenen Leistungsdrosseln verwenden das von CODACA unabhängig entwickelte niedrigverlustige Legierungspulver, das geringe Verluste, hohe Effizienz und eine breite Anwendungsfrequenz aufweist und das Rauschen auf ein extrem niedriges Niveau reduzieren kann. Sie verfügen über ein schlankes und leichtes Design (minimale Bauhöhe von 2 mm), sparen Platz auf der Leiterplatte, eignen sich für hochdichte Bestückung und weisen eine hohe Widerstandsfähigkeit gegen mechanische Stöße und Vibrationen auf (Erschütterungsbeständigkeit über 10G), wodurch die Anforderungen humanoider Roboter an hohe Leistungsdichte und hohe Stabilität erfüllt werden.
Empfohlene Modelle: CSAG , CSAC , CSAB , CSEB , CSHB , usw.
3,3 SMD-Leistungsinduktivität
Codaca SMD-Leistungsinduktivitäten werden hauptsächlich in Kameramodulen, Audiomodulen, DC-DC-Modulen usw. eingesetzt und können die Anforderungen hinsichtlich kleiner Induktivitätsgröße, großer Strombelastbarkeit und hoher Umwandlungseffizienz erfüllen.
Empfohlene Modelle: SPRHS , CSUS , CRHSM , VCRHS , SPQ , usw.

Als führender Anbieter auf dem Gebiet der magnetischen Komponententechnologie konzentriert sich Codaca Electronics seit 24 Jahren auf die Entwicklung von Induktivitäten, und Ingenieure können den geeigneten Induktivitätswert, die Nennstromstärke, Schaltfrequenz, Produktgröße usw. entsprechend den spezifischen Leistungsanforderungen jeder Subsystem des humanoiden Roboters für Induktoren auswählen. Für weitere detaillierte Informationen wenden Sie sich bitte an das Vertriebspersonal von Codaca.