

افزایش تقاضا برای اتوماسیون در صنایع تولیدی و خدماتی، توسعه سریع رباتهای انساننما را به دنبال داشته است. با افزایش درجات آزادی (DOF) و بهبود سرعت پاسخگویی به محیط، رباتهای انساننما پیچیدهتر شدهاند و قادرند حرکات انسان را واقعگرایانهتر شبیهسازی کنند. درجات آزادی بالاتر بدین معناست که رباتهای انساننما به درایوهای موتور بیشتری نیاز دارند و سیمپیچها نقش مهمی در سیستمهای کنترل موتور، مدیریت توان و پردازش سیگنال رباتهای انساننما ایفا میکنند.

1- کاربرد اصلی سیمپیچها در رباتهای انساننما
سیمپیچها عمدتاً در رباتهای انساننما در درایو موتور، مدیریت توان و پردازش سیگنال استفاده میشوند.
درایو موتور: رباتهای انساننما با کیفیت بالا در بازار معمولاً دارای ۴۰ تا ۵۰ موتور مفصلی هستند که این موتورها تعیینکننده آزادی و انعطاف ربات هستند. سلف از طریق ذخیره انرژی و هموار کردن جریان، موتور را بهصورت نرم میچرخاند و به سیستم کنترل موتور ربات انساننما کمک میکند تا حرکت مفصلی، تنظیم وضعیت و تعادل دینامیکی را به دست آورد. درایوهای موتور و بارهای با توان بالا نیاز به سلفهایی با ویژگی جریان اشباع بالا و ظرفیت تحمل جریان بالا دارند تا بتوانند با نوسانهای لحظهای جریان کنار بیایند. همزمان، لازم است تا تلفات کاهش یابد تا بازدهی سیستم افزایش یابد و عمر باتری افزوده شود.
مدیریت انرژی: سیمپیچها از اجزای اصلی مبدلهای DC-DC (مانند مدارهای باک و بوست) در سیستمهای مدیریت توان هستند و تأمین برق پایدار در ولتاژهای مختلف را برای پردازندههای هوش مصنوعی، سنسورها، ماژولهای ارتباطی و غیره فراهم میکنند و توزیع و بازدهی تبدیل انرژی را بهینه میسازند. نیاز به مقاومت کم جریان مستقیم (DCR)، بازده بالا در تبدیل برای کاهش تلفات توان، جریان اشباع بالا و پایداری دمایی مناسب وجود دارد.
پردازش سیگنال: در سیستمهای پردازش سیگنال، سیمپیچها عمدتاً برای سرکوب نویز فرکانس بالا و EMI استفاده میشوند و خلوص سیگنال را تضمین میکنند. به عنوان مثال، در سیستم ادراکی، این امر به ادراک و بازخورد تعاملی رباتهای انساننما از محیط خارجی کمک میکند. در سیستمهای ارتباطی و کنترلی، سیمپیچها با طراحی EMI، توان مقاومت در برابر تداخل ماژولهای رادار، دوربین، ارتباطات بیسیم و سایر ماژولها را تضمین کرده و پایداری عملیاتی تجهیزات را افزایش میدهند.
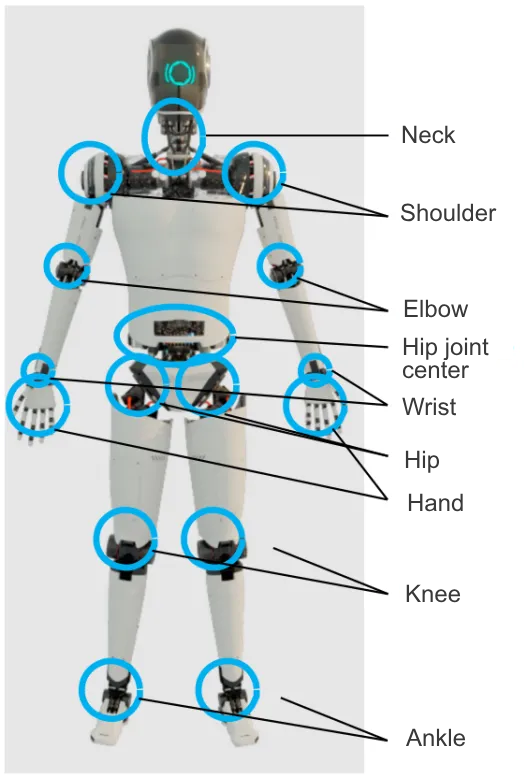
شکل ۱: محل اصلی موتور مفصل ربات انساننما (تصویر از TI)
2- تقاضا برای سیمپیچها در رباتهای انساننما
سیستم الکترونیکی رباتهای انساننما پیچیده است و برای دستیابی به کنترل حرکت دقیق و ارتباط قابل اعتماد، بدون حمایت از اجزای پایه مانند سیمپیچها ممکن نیست. ویژگیهای فنی رباتهای انساننما همچنین الزامات بالایی را نسبت به عملکرد و طراحی ساختاری محصولات سیمپیچی تعیین میکنند. این نیازمندیها عمدتاً به شرح زیر هستند:
2.1 کوچکسازی و چگالی توان بالا
فضای داخلی رباتهای انساننما بسیار فشرده است و تعداد زیادی موتور، واحدهای پردازش (CPU/GPU)، سنسورها و غیره را ادغام کرده است؛ بنابراین برد مدار تغذیه (مانند POL، مبدل نقطهبار) باید به صورت کوچکسازیشده طراحی شود. سیمپیچها (سرنشینها) نیز باید کوچک و سبک باشند تا با طراحیهای ساختاری فشرده سازگار شوند و در عین حال دارای چگالی توان بالا باشند تا بتوانند در فضای کم، توان بالایی را مدیریت کنند. سیمپیچهایی با ساختار قالبگرفته یا محافظتشده میتوانند جریان اشباع و جریان افزایش دمای بسیار بالایی را در حجم فیزیکی کوچک تحمل کنند که برای دستیابی به خروجی توان بالا در فضای محدود ضروری است.
2.2 عملکرد قوی در برابر تداخل الکترومغناطیسی
محیط الکترومغناطیسی داخلی رباتها پیچیده است و شامل مدارهای دیجیتال با سرعت بالا، نویز قوی سوئیچینگ ناشی از درایورهای موتور و سنسورهای حساس (مانند IMU و دوربینها) میشود. استفاده از سیمپیچهای بدون محافظ منجر به تولید میدان مغناطیسی قوی شده و به منبعی از تداخل الکترومغناطیسی تبدیل میشود که به شدت بر پایداری خوانش سنسورها و سیستم کنترل تأثیر میگذارد. سیمپیچهای محافظدار حداقل نشتی مغناطیسی دارند و بهطور مؤثری تداخل الکترومغناطیسی را کاهش میدهند و عملکرد قابل اعتماد سایر اجزای سیستم را تضمین میکنند. بنابراین، سیمپیچهای قالبگیریشده، سیمپیچهای توان با جریان بالا و سایر سیمپیچهای توان با ساختارهای محافظ مغناطیسی گزینههای ایدهآلتری هستند.
2.3 جریان اشباع بالا
بار دینامیکی ربات بهطور چشمگیری تغییر میکند، مانند هنگام شروع ناگهانی، حرکت یا بلند کردن اشیاء سنگین که جریان موتور و واحد پردازشی بلافاصله افزایش مییابد. سلف باید بتواند از اشباع مغناطیسی در جریانهای بالا جلوگیری کند (یعنی مقدار اندوکتانس بهصورت ناگهانی کاهش نیابد)، در غیر این صورت حلقه توان از کنترل خارج شده و باعث فروپاشی ولتاژ سیستم و راهاندازی مجدد آن میشود. بنابراین، سلف باید دارای ویژگی «اشباع نرم» باشد، یعنی هنگام نزدیک شدن به جریان اشباع، مقدار اندوکتانس بهتدریج کاهش یابد، نه اینکه مانند سقوط از صخره، ناگهانی کاهش پیدا کند. این امر بافری برای سیستم کنترل توان فراهم میکند و قابلیت اطمینان سیستم را افزایش میدهد.
2.4 عملکرد قوی در برابر لرزش و ضربه
رباتهای انساننما به طور مکرر حرکت میکنند و دارای ارتعاش مکانیکی زیاد هستند، بنابراین القاگر باید مقاوم در برابر ارتعاش و ضربه باشد، اتصالات مهر و سیمپیچ داخلی باید بتوانند تنش مکانیکی را تحمل کنند. القاگر ساختار ریختهای به طور کامل سیمپیچ را در داخل ماده مغناطیسی مستحکن میکند که دارای استحکام مکانیکی بسیار بالا و مقاومت بسیار قوی در برابر ضربه است، به همین دلیل به طور گسترده در سیستمهای ربات انساننما استفاده میشود.
2.5 سازگاری با محیطهای با فرکانس بالا و دمای بالا
القاگر باید دارای خصوصیات خوب در فرکانس بالا باشد، به طوری که بتواند تداخل فرکانس بالا را به طور موثر سرکوب کند، ریپل و نویز را کاهش دهد و تلفات انرژی کم را در فرکانس بالا حفظ کند تا بازدهی تبدیل بهبود یابد.
علاوه بر این، سیمپیچ باید قادر باشد مقدار اندوکتانس را در محیط با دمای بالا پایدار نگه دارد، کاهش مقدار Q کوچک باشد و عملکرد به راحتی تخریب نشود تا اطمینان حاصل شود که عملکرد اندوکتانس در ربات در طول کار طولانیمدت قابل اعتماد است.
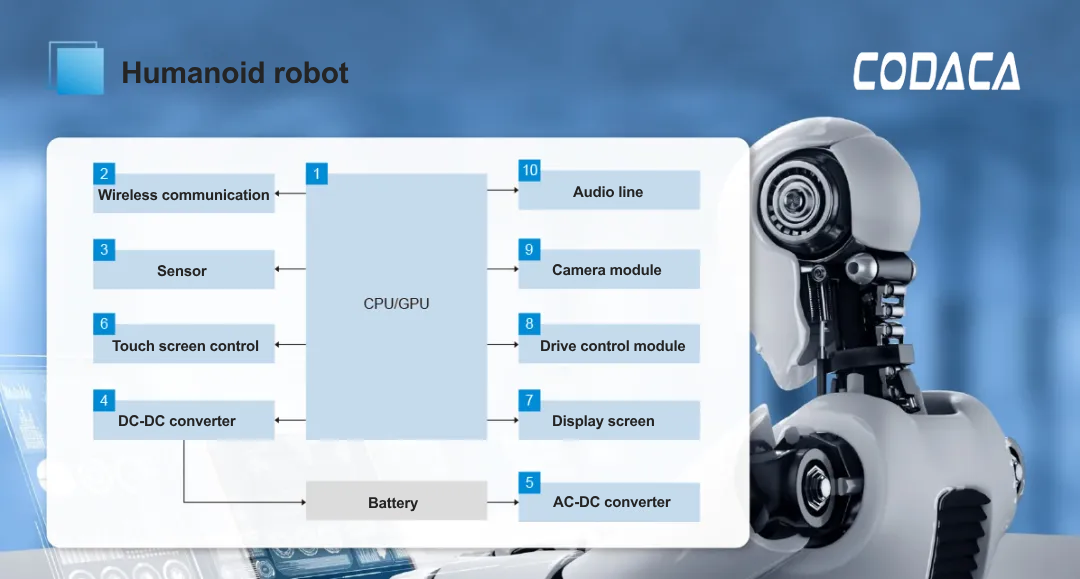
شکل ۲ کاربرد سیمپیچ در ربات انساننما
3- کدکا راهحل سیمپیچ برای رباتهای انساننما
در کاربردهایی مانند رباتهای انساننما که ترکیبی از چگالی توان بالا، بازده بالا، قابلیت اطمینان بالا، محیطهای پیچیده EMI و شرایط مکانیکی سخت هستند، سیمپیچهای هسته پودری آلیاژی با جریان بالا و محافظتشده به دلیل مزایای جامع عملکردی، انتخاب غیرقابل مناقشه اصلی در مدارهای تغذیه، بهویژه منابع تغذیه POL برای واحدهای محاسباتی اصلی و درایوهای موتور مفصلی شدهاند. طراحی آن بهطور کامل تعادلی بین سه چالش اصلی عملکرد، اندازه و قابلیت اطمینان برقرار میکند.
از طریق تحقیق و توسعه مستقل و نوآوری فناوری، کوداکا راهحلهای القایی سازگار برای رباتهای انساننما ارائه میدهد و شرکت محصولات متعددی در دستهها و مدلهای مختلف از جمله القاگرهای توان جریان بالا با ساختار محافظ مغناطیسی، القاگرهای قالبگیریشده نازک و سبک و القاگرهای حالت مشترک را عرضه کرده است. این محصولات میتوانند مشخصات الکتریکی متفاوتی را فراهم کنند تا به نیازهای عملکرد بالای القاگرها در سناریوهای مختلف رباتهای انساننما پاسخ دهند و بهطور گسترده در ماژولهای ارتباطی و ناوبری ربات، ماژولهای توان، ماژولهای درایو موتور، برد کنترل ربات و سایر ماژولها مورد استفاده قرار گیرند.
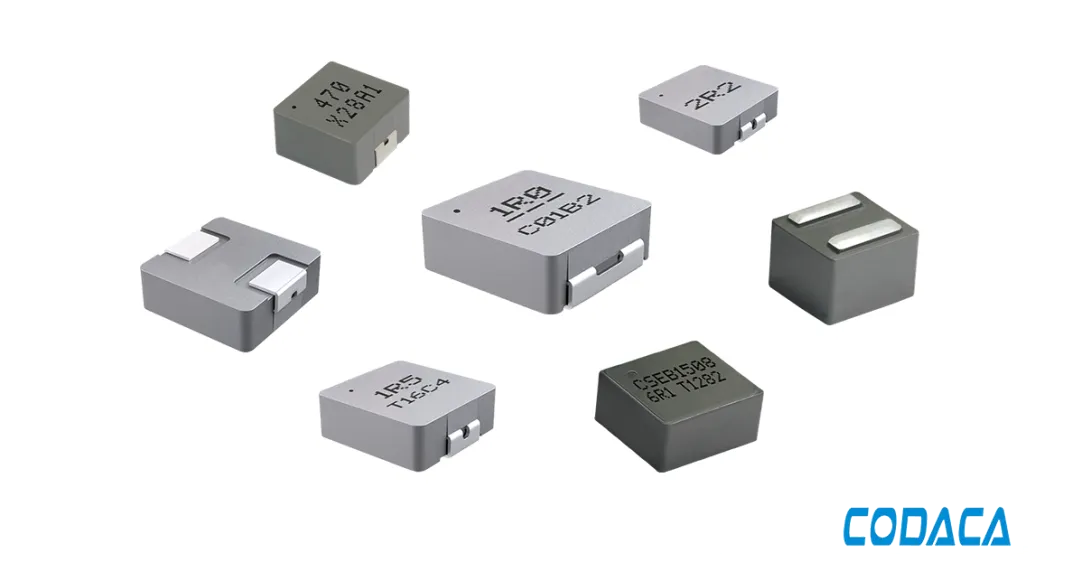
3.1 القایی توان جریان بالا با ساختار فشرده
دستگاه های محرک برق کمکت عمدتاً در ماژولهای DC-DC موتورهای رباتهای انساننما و سیستمهای مدیریت توان استفاده میشوند. سیمپیچ با جریان بالا از هسته پودر مغناطیسی فلزی با اتلاف کم استفاده میکند که بهصورت مستقل توسط شرکت Codaca توسعه داده شده است و دارای ویژگیهای جریان اشباع بالا، تلفات کم، بازده تبدیل بالا و دمای کاری بالا است تا عملکرد و دوام رباتهای انساننما را تضمین کند. جریان سیمپیچ با جریان بالا میتواند تا 422 آمپر و دمای کاری تا 170 درجه سانتیگراد برسد. همزمان، محصول از ساختار مغناطیسی محافظتشده استفاده میکند که عملکرد قوی در مقابل تداخل الکترومغناطیسی دارد. این محصول بهطور کامل نیازهای رباتهای انساننما را در زمینه جریان اشباع بالا، دمای کاری بالا و تداخل الکترومغناطیسی پایین برآورده میکند.
مدلهای پیشنهادی: سیاسبیاکس , CSBA , سیاسسیام , سیاسیوتی , سیاسسیآیال و غیره.

3.2 سیمپیچهای قالبگرفته شده نازک و سبک
سلفهای قالبگرفته شده عمدتاً در ماژولهای نمایش ربات انساننما، ماژولهای کنترل صفحه لمسی، ماژولهای DC-DC و غیره استفاده میشوند. سیمپیچهای تراشی توان از پودر آلیاژ کمتلف ابداعشده توسط CODACA استفاده میکنند که دارای تلفات کم، بازدهی بالا، فرکانس کاربردی گسترده بوده و میتواند صدا را به حد بسیار پایین برساند. این سیمپیچها طراحی نازک و سبک دارند (حداقل اندازه 2 میلیمتر)، فضای PCB را صرفهجویی میکنند، مناسب برای نصب با چگالی بالا بوده و مقاومت قوی در برابر ضربهها و ارتعاشات مکانیکی دارند (مقاومت در برابر ارتعاش بیش از 10G است) و نیازهای رباتهای انساننما به چگالی توان بالا و پایداری بالا را برآورده میسازد.
مدلهای پیشنهادی: سیاسایجی , سیاسایسی , سیاسایبی , سیاسایبی , سیاساچبی و غیره.
3.3 SMD power inductor
Codaca SMD power inductors عمدتاً در ماژولهای دوربین، ماژولهای صوتی، ماژولهای DC-DC و غیره استفاده میشوند که میتوانند نیازهای مربوط به اندازه کوچک سیمپیچ، جریان بزرگ و بازدهی بالای تبدیل را برآورده کنند.
مدلهای پیشنهادی: SPRHS , CSUS , CRHSM , VCRHS , اسپیکیو و غیره.

بهعنوان تأمینکننده پیشرو در زمینه فناوری قطعات مغناطیسی، کدآکا الکترونیکس به مدت 24 سال بر توسعه سلفها تمرکز کرده است و مهندسان میتوانند مقدار سلف مناسب، جریان نامی، فرکانس سوئیچینگ، ابعاد محصول و غیره را با توجه به الزامات عملکردی خاص هر زیرسیستم ربات انساننما برای سلفها انتخاب کنند. برای اطلاعات بیشتر با کارشناسان فروش کدآکا تماس حاصل فرمایید.