
Liens rapides

La demande croissante d'automatisation dans les industries manufacturières et de services stimule le développement rapide des robots humanoïdes. Avec l'augmentation du nombre de degrés de liberté (DDL) et l'amélioration de la rapidité de réponse à l'environnement, les robots humanoïdes deviennent plus sophistiqués, ce qui leur permet de simuler les mouvements humains de manière plus réaliste. Un nombre plus élevé de degrés de liberté signifie que les robots humanoïdes nécessitent davantage de moteurs électriques, et les inductances jouent un rôle important dans les systèmes de commande des moteurs, de gestion de l'énergie et de traitement des signaux des robots humanoïdes.

1- Principales applications des inductances dans les robots humanoïdes
Les inductances sont principalement utilisées dans les robots humanoïdes pour la commande des moteurs, la gestion de l'énergie et le traitement des signaux.
Commande des moteurs : Les robots humanoïdes haut de gamme sur le marché disposent généralement de 40 à 50 moteurs articulés, qui déterminent la liberté de mouvement et la souplesse du robot. L'inductance fait tourner le moteur en douceur grâce au stockage d'énergie et à la régulation du courant, aidant ainsi le système de commande des moteurs du robot humanoïde à réaliser les mouvements articulaires, les ajustements d'attitude et l'équilibre dynamique. Les commandes de moteur et les charges haute puissance nécessitent des inductances présentant des caractéristiques de courant de saturation élevé et une forte capacité de conduction de courant afin de faire face aux fluctuations instantanées du courant. En même temps, il est nécessaire de réduire les pertes afin d'améliorer l'efficacité du système et d'allonger la durée de vie de la batterie.
Gestion de l'alimentation : Les inductances sont des composants essentiels des convertisseurs DC-DC (tels que les circuits buck et boost) dans les systèmes de gestion de l'énergie, fournissant une alimentation stable à différentes tensions pour les processeurs d'IA, capteurs, modules de communication, etc., en optimisant la distribution et l'efficacité de conversion de l'énergie. Elles doivent présenter une faible résistance continue (DCR), une haute efficacité de conversion afin de réduire les pertes d'énergie, une forte intensité de saturation et une bonne stabilité en température.
Traitement du signal: Dans les systèmes de traitement du signal, les inductances sont principalement utilisées pour supprimer les bruits haute fréquence et les interférences électromagnétiques (EMI), garantissant la pureté du signal. Par exemple, dans le système de perception, elles permettent la perception et la rétroaction interactive des robots humanoïdes sur l'environnement externe. Dans les systèmes de communication et de contrôle, les inductances utilisent une conception EMI pour assurer la capacité d'anti-brouillage des modules radar, caméra, communication sans fil, entre autres, et améliorent la stabilité de fonctionnement des équipements.
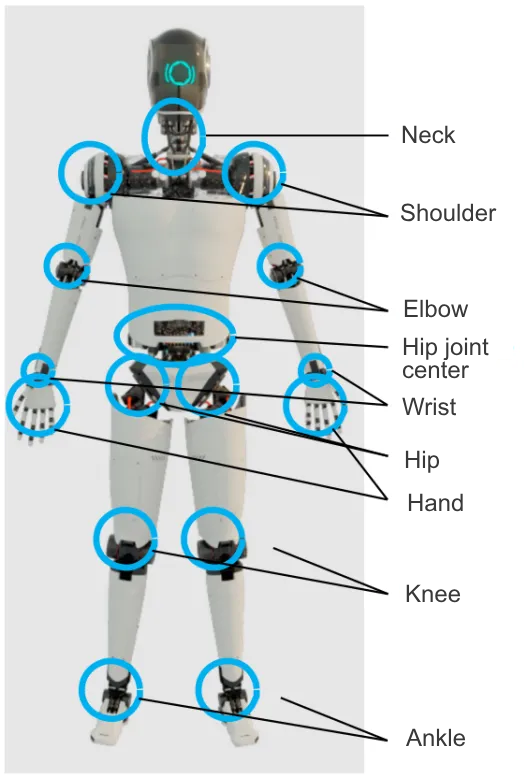
Figure 1 : Emplacement principal du moteur à joint du robot humanoïde (image issue de TI)
2- La demande en inductances pour les robots humanoïdes
Le système électronique des robots humanoïdes est complexe, et pour assurer une commande précise des mouvements et des communications fiables, il dépend nécessairement de composants de base tels que les inductances. Les caractéristiques techniques des robots humanoïdes déterminent également leurs exigences élevées en matière de performances et de conception structurelle des produits inductifs. Les principales exigences sont les suivantes :
2.1 Miniaturisation et densité de puissance élevée
L'espace interne des robots humanoïdes est extrêmement compact, intégrant un grand nombre de moteurs, d'unités de calcul (UCPs/UCGs), de capteurs, etc., et la carte de circuit d'alimentation (telle que POL, convertisseur point-de-charge) doit être miniaturisée. Les inductances doivent être petites et légères afin de s'adapter à des conceptions structurelles compactes, tout en offrant une forte densité de puissance pour assurer une haute puissance dans une petite surface au sol. Des inductances à construction moulée ou blindée peuvent supporter des courants de saturation et des courants de montée en température très élevés en petite taille physique, ce qui est essentiel pour atteindre une forte puissance dans un espace limité.
2.2 Performances élevées en résistance aux interférences électromagnétiques
L'environnement électromagnétique interne des robots est complexe, avec des circuits numériques haute vitesse, un bruit de commutation important provenant des contrôleurs de moteur, et des capteurs sensibles (tels que les IMU et les caméras). Le recours à des inductances non blindées génère un champ magnétique intense et crée une source d'interférence électromagnétique, ce qui affecte gravement la stabilité des lectures des capteurs et du système de contrôle. L'inductance blindée présente une fuite magnétique minimale, réduit efficacement les interférences électromagnétiques et garantit le fonctionnement fiable des autres composants du système. Par conséquent, les inductances moulées, les inductances de puissance à forte intensité et autres inductances de puissance dotées de structures magnétiques blindées constituent des choix plus idéaux.
2.3 Forte intensité de saturation
La charge dynamique du robot change considérablement, par exemple lors d'un démarrage soudain, de la marche ou du levage d'objets lourds, ce qui fait instantanément grimper le courant du moteur et de l'unité de calcul. L'inductance doit être capable d'éviter la saturation magnétique à courant élevé (c'est-à-dire que la valeur d'inductance ne diminue pas brusquement), sinon la boucle d'alimentation sortira de contrôle, provoquant un effondrement de la tension du système et un redémarrage. Par conséquent, l'inductance doit présenter des caractéristiques de « saturation progressive », c'est-à-dire qu'en approchant du courant de saturation, la valeur d'inductance diminue lentement, plutôt que de chuter brutalement. Cela fournit un tampon pour le système de régulation d'alimentation et améliore la fiabilité du système.
2.4 Haute résistance aux vibrations et aux chocs
Les robots humanoïdes bougent fréquemment, subissent de nombreuses vibrations mécaniques, et les inductances doivent présenter une résistance aux vibrations et aux chocs ; leurs soudures doivent être solides, et le boîtier ainsi que la bobine interne doivent pouvoir supporter des contraintes mécaniques. L'inductance de structure moulée solidifie complètement la bobine à l'intérieur du matériau magnétique, ce qui confère une résistance mécanique extrêmement élevée et une très forte tenue aux chocs ; elle est donc largement utilisée dans les systèmes de robots humanoïdes.
2,5 Adapter aux environnements hautes fréquences et hautes températures
L'inductance doit présenter de bonnes caractéristiques haute fréquence, permettant de supprimer efficacement les interférences haute fréquence, de réduire les ondulations et le bruit, et de maintenir de faibles pertes d'énergie à haute fréquence afin d'améliorer le rendement énergétique.
En outre, l'inductance doit être capable de maintenir une valeur d'inductance stable dans un environnement à haute température, sa valeur Q doit faiblement diminuer et ses performances ne doivent pas se dégrader facilement, afin de garantir que le comportement inductif du robot reste fiable pendant un fonctionnement prolongé.
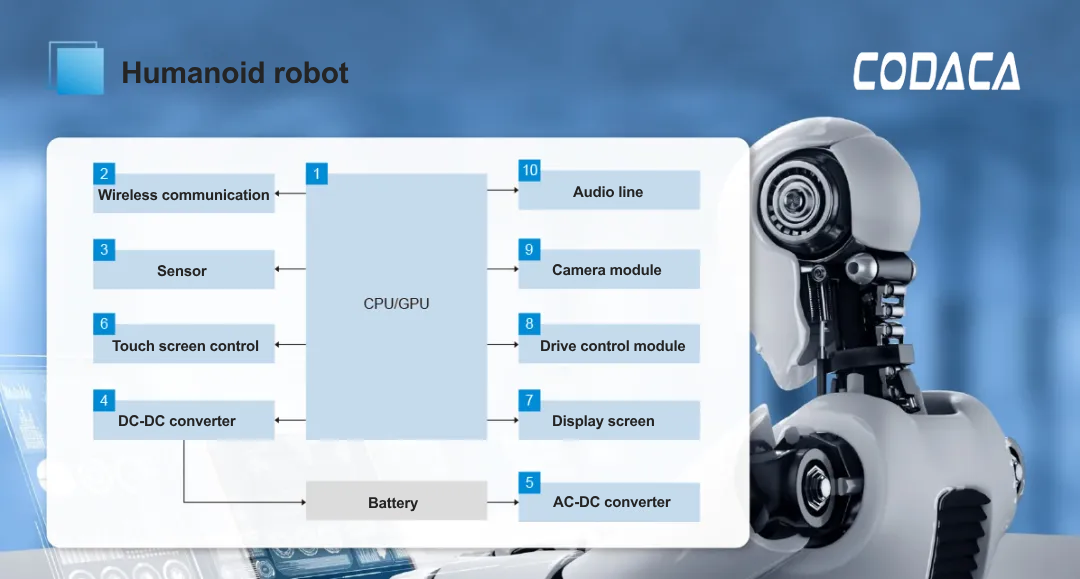
Fig.2 Application de l'inductance dans les robots humanoïdes
3- Codaca solution d'inductance pour robots humanoïdes
Dans des applications telles que les robots humanoïdes, qui combinent une densité de puissance élevée, un rendement élevé, une grande fiabilité, des environnements CEM complexes et des conditions mécaniques sévères, les inductances blindées à noyau de poudre d'alliage supportant des courants élevés sont devenues le choix incontestable dans les circuits d'alimentation, notamment pour les alimentations POL destinées aux unités centrales de calcul et aux moteurs des articulations, grâce à leurs avantages globaux en termes de performance. Leur conception équilibre parfaitement les trois défis fondamentaux que sont la performance, la compacité et la fiabilité.
Grâce à une recherche et un développement indépendants ainsi qu'à une innovation technologique, Codaca fournit des solutions d'inductances adaptatives pour les robots humanoïdes. L'entreprise a lancé plusieurs catégories et modèles de produits tels que des inductances de puissance à forte intensité avec structure blindée magnétique, des inductances moulées fines et légères, ainsi que des selfs de mode commun. Elle peut offrir différentes caractéristiques électriques afin de répondre aux exigences hautes performances des inductances dans divers scénarios d'utilisation sur les robots humanoïdes, et est largement utilisée dans les modules de communication et de navigation robotisés, les modules d'alimentation, les modules de commande moteur, les cartes de contrôle robotisées et d'autres modules.
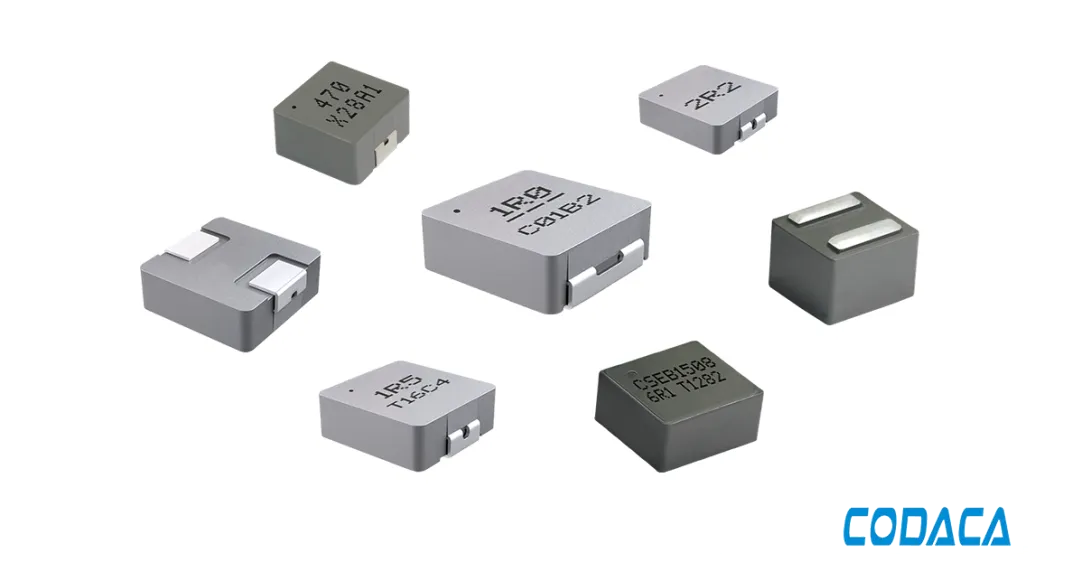
3.1 Inductance de puissance compacte à forte intensité
À haute puissance compacte sont principalement utilisés dans les modules DC-DC des systèmes de commande moteur et de gestion d'énergie des robots humanoïdes. L'inductance forte courant intègre un noyau en poudre magnétique métallique à faibles pertes, développé indépendamment par Codaca, qui présente les caractéristiques suivantes : courant de saturation élevé, faibles pertes, haute efficacité de conversion et température de fonctionnement élevée, garantissant ainsi les performances et l'autonomie des robots humanoïdes. L'inductance forte courant peut atteindre jusqu'à 422 A et la température de fonctionnement jusqu'à 170 °C. Par ailleurs, le produit adopte une structure magnétiquement blindée, offrant une forte résistance aux interférences électromagnétiques. Il répond pleinement aux besoins des robots humanoïdes en termes de courant de saturation élevé, de température de fonctionnement élevée et de faible émission d'interférences électromagnétiques.
Modèles recommandés : CSBX , CSBA , CSCM , CSUT , CSCIL , etc.

3.2 Inductances moulées fines et légères
Inductances moulues sont principalement utilisés dans les modules d'affichage de robots humanoïdes, les modules de commande d'écran tactile, les modules DC-DC, etc. Les selfs moulées adoptent la poudre d'alliage à faibles pertes développée indépendamment par CODACA, qui présente des pertes faibles, un rendement élevé, une large plage de fréquences d'utilisation et permet de réduire le bruit à un niveau ultra-faible. Elles adoptent un design fin et léger (taille minimale de 2 mm), économisent de l'espace sur le circuit imprimé, conviennent au montage haute densité et offrent une forte résistance aux chocs mécaniques et aux vibrations (la résistance aux vibrations est supérieure à 10G), répondant ainsi aux besoins des robots humanoïdes en matière de densité de puissance élevée et de grande stabilité.
Modèles recommandés : CSAG , CSAC , CSAB , CSEB , CSHB , etc.
3,3 µH self SMD
Autres selfs SMD Codaca sont principalement utilisés dans les modules caméra, les modules audio, les modules DC-DC, etc., et peuvent répondre aux besoins de petites dimensions d'inductance, de forte intensité et de haut rendement de conversion, etc.
Modèles recommandés : SPRHS , CSUS , CRHSM , VCRHS , SPQ , etc.

En tant que fournisseur de premier plan dans le domaine de la technologie des composants magnétiques, Codaca Electronics se concentre sur le développement d'inductances depuis 24 ans, et ses ingénieurs peuvent adapter la valeur d'inductance appropriée, le courant nominal, la fréquence de commutation, la taille du produit, etc., selon les exigences spécifiques de performance de chaque sous-système du robot humanoïde. Veuillez contacter le personnel commercial de Codaca pour des informations plus détaillées.