

विनिर्माण और सेवा उद्योगों में स्वचालन की बढ़ती मांग मानवाकृति रोबोट के त्वरित विकास को प्रेरित कर रही है। गतिशीलता की डिग्री (डिग्रीज ऑफ फ्रीडम - DOF) में वृद्धि और पर्यावरण के प्रति प्रतिक्रिया गति में सुधार के साथ, मानवाकृति रोबोट अधिक परिष्कृत हो गए हैं, जिससे वे मानव गतिविधियों का अधिक यथार्थता से अनुकरण कर सकते हैं। उच्चतर गतिशीलता की डिग्री का अर्थ है कि मानवाकृति रोबोट को अधिक मोटर ड्राइव की आवश्यकता होती है, और मानवाकृति रोबोट के मोटर नियंत्रण, बिजली प्रबंधन और सिग्नल प्रसंस्करण प्रणालियों में इंडक्टर्स की महत्वपूर्ण भूमिका होती है।

1- मानवाकृति रोबोट में इंडक्टर्स का मुख्य अनुप्रयोग
इंडक्टर्स का उपयोग मुख्य रूप से मानवाकृति रोबोट में मोटर ड्राइव, बिजली प्रबंधन और सिग्नल प्रसंस्करण में किया जाता है।
मोटर ड्राइव: बाजार में उच्च-स्तरीय ह्यूमनॉइड रोबोट्स में आमतौर पर 40-50 कलात्मक मोटर्स होते हैं, जो रोबोट की स्वतंत्रता और लचीलेपन को निर्धारित करते हैं। इंडक्टर ऊर्जा भंडारण और धारा को सुचारु बनाने के माध्यम से मोटर को सुचारु रूप से घूमने में सहायता करता है, जिससे मानवाकृति रोबोट मोटर नियंत्रण प्रणाली संधि गति, मुद्रा समायोजन और गतिशील संतुलन प्राप्त करने में सक्षम होती है। मोटर ड्राइव और उच्च-शक्ति भार क्षणिक धारा उतार-चढ़ाव से निपटने के लिए उच्च संतृप्ति धारा विशेषताओं और उच्च धारा वहन क्षमता वाले इंडक्टर्स की आवश्यकता होती है। साथ ही, प्रणाली दक्षता में सुधार और बैटरी जीवन बढ़ाने के लिए हानि को कम करना आवश्यक है।
पावर प्रबंधन: इंडक्टर पावर प्रबंधन प्रणालियों में डीसी-डीसी कनवर्टर (जैसे बक और बूस्ट सर्किट) के मुख्य घटक हैं, जो एआई प्रोसेसर, सेंसर, संचार मॉड्यूल आदि के लिए विभिन्न वोल्टेज पर स्थिर बिजली आपूर्ति प्रदान करते हैं, ऊर्जा वितरण और रूपांतरण दक्षता को अनुकूलित करते हैं। इनमें कम डायरेक्ट करंट प्रतिरोध (DCR), शक्ति हानि को कम करने के लिए उच्च रूपांतरण दक्षता, उच्च संतृप्ति धारा और अच्छी तापमान स्थिरता की आवश्यकता होती है।
सिग्नल प्रोसेसिंग: सिग्नल प्रसंस्करण प्रणालियों में, इंडक्टरों का उपयोग मुख्य रूप से उच्च-आवृत्ति शोर और ईएमआई को दबाने के लिए किया जाता है, जिससे सिग्नल शुद्धता सुनिश्चित होती है। उदाहरण के लिए, धारणा प्रणाली में, यह मानवाकृति रोबोट्स द्वारा बाह्य वातावरण पर धारणा और अंतःक्रियात्मक प्रतिक्रिया को साकार करने में सहायता करता है। संचार और नियंत्रण प्रणालियों में, इंडक्टर ईएमआई डिज़ाइन का उपयोग रडार, कैमरा, वायरलेस संचार और अन्य मॉड्यूल की हस्तक्षेप-रोधी क्षमता सुनिश्चित करने और उपकरणों के संचालन की स्थिरता में सुधार करने के लिए करते हैं।
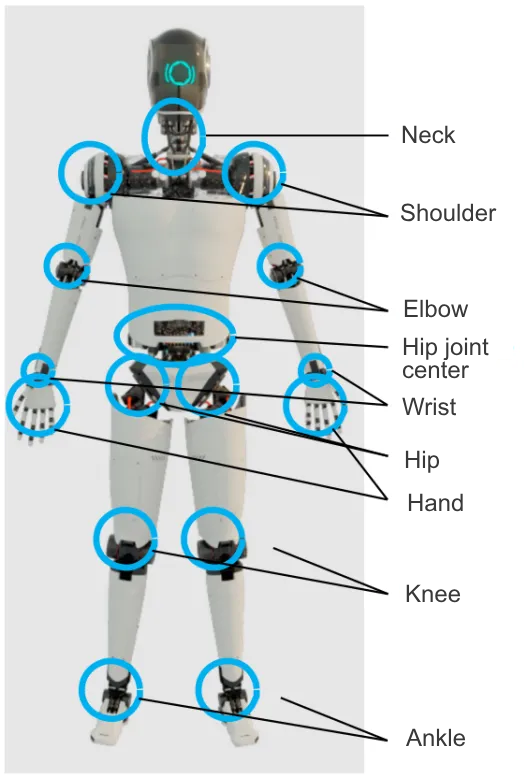
चित्र 1: मानवाकृति रोबोट के संयुक्त मोटर का मुख्य स्थान (TI की छवि से)
2- मानवाकृति रोबोट के लिए प्रेरकों की मांग
मानवाकृति रोबोट की इलेक्ट्रॉनिक प्रणाली जटिल है, और सटीक गति नियंत्रण तथा विरामरहित संचार सुनिश्चित करने के लिए, प्रेरक जैसे आधारभूत घटकों के समर्थन से अलग नहीं किया जा सकता। मानवाकृति रोबोट की तकनीकी विशेषताएं इनके प्रेरक उत्पादों के प्रदर्शन तथा संरचनात्मक डिजाइन के प्रति उच्च आवश्यकता को भी निर्धारित करती हैं। आवश्यकताएं मुख्यतः निम्नलिखित हैं:
2.1 लघुकरण तथा उच्च शक्ति घनत्व
मानवाकार रोबोट के आंतरिक स्थान अत्यंत संकुलित होता है, जिसमें बहुत से मोटर्स, कंप्यूटिंग यूनिट (CPU/GPU), सेंसर आदि एकीकृत किए जाते हैं, तथा पावर सप्लाई सर्किट बोर्ड (जैसे POL, पॉइंट-ऑफ-लोड कनवर्टर) को लघुकृत होना आवश्यक है। इंडक्टर्स को संकुलित संरचनात्मक डिज़ाइन में फिट होने के लिए छोटा और हल्का होना चाहिए, साथ ही उच्च शक्ति घनत्व भी होना चाहिए ताकि छोटे क्षेत्र में उच्च शक्ति संभाली जा सके। ढाल वाले या आवृत्त निर्माण वाले इंडक्टर्स छोटे भौतिक आकार में बहुत बड़ी संतृप्ति धारा और तापमान वृद्धि धारा का प्रतिरोध कर सकते हैं, जो सीमित स्थान में उच्च शक्ति आउटपुट प्राप्त करने के लिए आवश्यक है।
2.2 मजबूत विरोधी-विद्युत चुंबकीय हस्तक्षेप प्रदर्शन
रोबोट्स का आंतरिक विद्युत चुम्बकीय वातावरण जटिल होता है, जिसमें उच्च-गति वाले डिजिटल सर्किट, मोटर ड्राइवरों से प्रबल स्विचिंग शोर और संवेदनशील सेंसर (जैसे IMUs और कैमरे) शामिल होते हैं। अनशील्डेड इंडक्टर्स के उपयोग से एक मजबूत चुंबकीय क्षेत्र उत्पन्न होता है जो विद्युत चुम्बकीय हस्तक्षेप का स्रोत बन जाता है, जिससे सेंसर के पठन और नियंत्रण प्रणाली की स्थिरता पर गंभीर प्रभाव पड़ता है। शील्डेड इंडक्टर में न्यूनतम चुंबकीय रिसाव होता है, जो प्रभावी ढंग से विद्युत चुम्बकीय हस्तक्षेप को कम करता है और सिस्टम में अन्य घटकों के विश्वसनीय संचालन की गारंटी देता है। इसलिए, मोल्डेड इंडक्टर, उच्च धारा वाले पावर इंडक्टर और अन्य चुंबकीय शील्ड संरचना वाले पावर इंडक्टर अधिक आदर्श विकल्प हैं।
2.3 उच्च संतृप्ति धारा
रोबोट का गतिशील भार अचानक शुरू होने, चलने या भारी वस्तुओं को उठाने जैसे समय में बहुत अधिक बदल जाता है, जिससे मोटर और कंप्यूटिंग इकाई का धारा तुरंत बढ़ जाती है। उच्च धारा पर चुंबकीय संतृप्ति से बचने के लिए प्रेरक को सक्षम होना चाहिए (अर्थात् प्रेरकत्व मान तेजी से नहीं गिरना चाहिए), अन्यथा शक्ति लूप नियंत्रण से बाहर हो जाएगा, जिससे प्रणाली वोल्टेज ढह जाएगी और पुनः आरंभ हो जाएगी। इसलिए, प्रेरकत्व में "मृदु संतृप्ति" की विशेषताएं होनी चाहिए, अर्थात् जब संतृप्ति धारा के निकट पहुंचते हैं, तो प्रेरकत्व मान धीरे-धीरे कम हो, बजाय खड्ड में गिरने के। इससे शक्ति नियंत्रण प्रणाली को बफर प्रदान किया जाता है और प्रणाली की विश्वसनीयता बढ़ जाती है।
2.4 मजबूत कंपन और आघात प्रतिरोध क्षमता
ह्यूमनॉइड रोबोट अक्सर गति में रहते हैं, इनमें यांत्रिक कंपन की मात्रा अधिक होती है, और प्रेरक (इंडक्टर) में कंपन और आघात प्रतिरोध की आवश्यकता होती है, इसके सोल्डर जोड़ मजबूत होने चाहिए, और खोल तथा आंतरिक कुंडली यांत्रिक तनाव का सामना कर सकने में सक्षम होनी चाहिए। ढाला गया संरचना वाला प्रेरक चुंबकीय सामग्री के अंदर कुंडली को पूरी तरह से ठोस बना देता है, जिसमें अत्यधिक उच्च यांत्रिक शक्ति होती है और जो आघात प्रतिरोध में बहुत मजबूत होता है, इसलिए इसका उपयोग ह्यूमनॉइड रोबोट प्रणालियों में व्यापक रूप से किया जाता है।
2.5 उच्च-आवृत्ति और उच्च-तापमान वाले वातावरण के अनुकूल होना
प्रेरक में अच्छी उच्च-आवृत्ति विशेषताएं होनी चाहिए, जो उच्च-आवृत्ति हस्तक्षेप को प्रभावी ढंग से दबा सके, तरंग और शोर को कम कर सके, और उच्च आवृत्ति पर कम ऊर्जा हानि बनाए रख सके ताकि रूपांतरण दक्षता में सुधार हो सके।
इसके अतिरिक्त, प्रेरक को उच्च तापमान वाले वातावरण में प्रेरकत्व मान को स्थिर रखने में सक्षम होना चाहिए, Q मान में कमी न्यूनतम होनी चाहिए, और प्रदर्शन घटने के लिए अधिक संवेदनशील नहीं होना चाहिए, ताकि यह सुनिश्चित किया जा सके कि लंबे समय तक काम करने के दौरान रोबोट का प्रेरकत्व प्रदर्शन विश्वसनीय बना रहे।
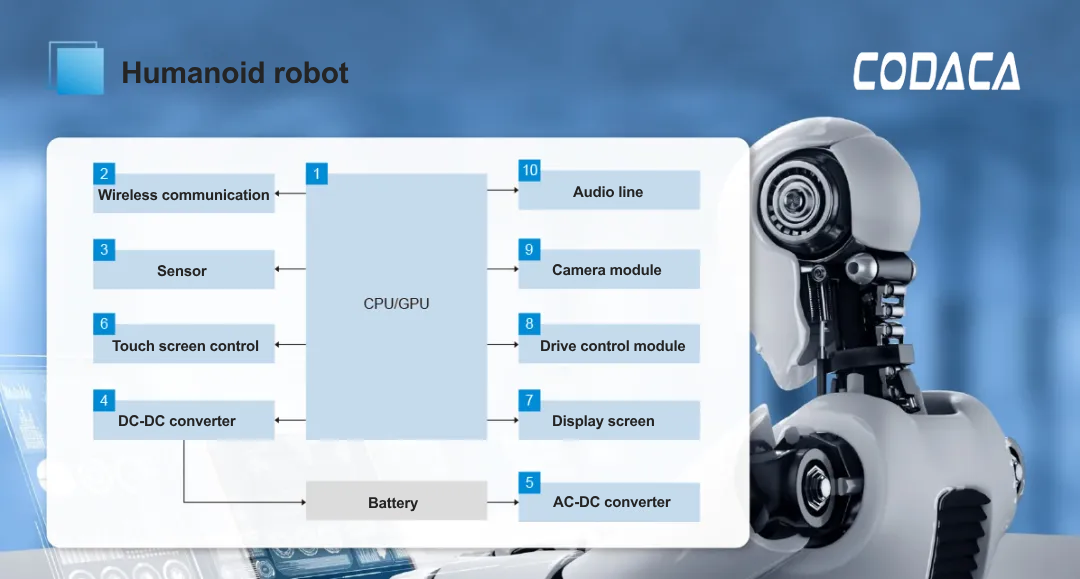
चित्र.2 मानवाकृति रोबोट में प्रेरक का अनुप्रयोग
3- Codaca मानवाकृति रोबोट के लिए प्रेरक समाधान
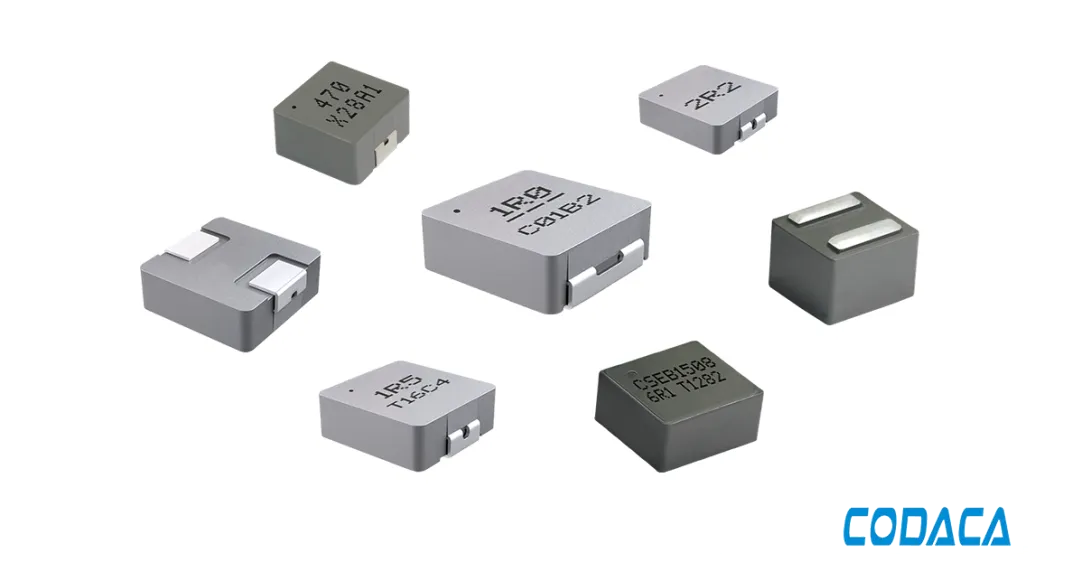
मानवाकृति रोबोट जैसे अनुप्रयोगों में, जो उच्च शक्ति घनत्व, उच्च दक्षता, उच्च विश्वसनीयता, जटिल EMI वातावरण और कठोर यांत्रिक स्थितियों को जोड़ते हैं, उच्च-धारा, कवचित, मिश्र धातु पाउडर कोर प्रेरक विद्युत परिपथों में अपने व्यापक प्रदर्शन लाभों के कारण अखंड मुख्यधारा विकल्प बन गए हैं, विशेष रूप से कोर कंप्यूटिंग इकाइयों और संयुक्त मोटर ड्राइव के लिए POL बिजली आपूर्ति में। इसके डिज़ाइन ने प्रदर्शन, आकार और विश्वसनीयता की तीन मुख्य चुनौतियों के बीच एक आदर्श संतुलन स्थापित किया है।
स्वतंत्र अनुसंधान और तकनीकी नवाचार के माध्यम से, कोडाका मानवाकृति रोबोट्स के लिए अनुकूलनक्षम इंडक्टर समाधान प्रदान करता है, और कंपनी ने चुंबकीय शील्डिंग वाले उच्च धारा शक्ति इंडक्टर, पतले और हल्के ढाला इंडक्टर, और सामान्य मोड चोक्स जैसे उत्पादों के कई श्रेणियों और मॉडलों को लॉन्च किया है। यह विभिन्न परिदृश्यों में मानवाकृति रोबोट्स के लिए उच्च प्रदर्शन आवश्यकताओं को पूरा करने के लिए विभिन्न विद्युत विशेषताएं प्रदान कर सकता है, और रोबोट संचार और नेविगेशन मॉड्यूल, शक्ति मॉड्यूल, मोटर ड्राइव मॉड्यूल, रोबोट नियंत्रण बोर्ड और अन्य मॉड्यूल में व्यापक रूप से उपयोग किया जाता है।
3.1 कॉम्पैक्ट उच्च धारा शक्ति इंडक्टर
कॉम्पैक्ट उच्च धारा शक्ति प्रेरक मुख्य रूप से मानवाकृति रोबोट मोटर ड्राइव और पावर प्रबंधन प्रणालियों में DC-DC मॉड्यूल में उपयोग किए जाते हैं। उच्च-धारा इंडक्टर Codaca द्वारा स्वतंत्र रूप से विकसित कम-हानि धातु चुंबकीय पाउडर कोर सामग्री को अपनाता है, जिसमें उच्च संतृप्ति धारा, कम हानि, उच्च रूपांतरण दक्षता और उच्च संचालन तापमान की विशेषताएं होती हैं, जो मानवाकृति रोबोट के प्रदर्शन और सहनशक्ति को सुनिश्चित करती हैं। उच्च-धारा इंडक्टर 422A तक हो सकता है और संचालन तापमान 170°C तक पहुँच सकता है। साथ ही, उत्पाद चुंबकीय कवच संरचना को अपनाता है, जिसमें मजबूत विद्युत चुंबकीय हस्तक्षेप प्रतिरोध प्रदर्शन होता है। यह मानवाकृति रोबोट की उच्च संतृप्ति धारा, उच्च संचालन तापमान और कम विद्युत चुंबकीय हस्तक्षेप की आवश्यकताओं को पूरी तरह से पूरा करता है।
प्रस्तावित मॉडल्स: सीएसबीएक्स , सीएसबीए , सीएससीएम , सीएसयूटी , सीएससीआईएल , आदि।

3.2 पतले और हल्के ढाला गया इंडक्टर
मोल्डेड इंडक्टर मुख्य रूप से ह्यूमनॉइड रोबोट डिस्प्ले मॉड्यूल, टच स्क्रीन नियंत्रण मॉड्यूल, DC-DC मॉड्यूल आदि में उपयोग किए जाते हैं। मोल्डिंग पावर चोक CODACA द्वारा स्वतंत्र रूप से विकसित कम-हानि मिश्र धातु पाउडर को अपनाते हैं, जिसमें कम हानि, उच्च दक्षता, विस्तृत आवृत्ति सीमा होती है और शोर को अत्यधिक कम किया जा सकता है। इसमें 2 मिमी के न्यूनतम आकार के साथ पतले और हल्के डिज़ाइन को अपनाया गया है, जो PCB स्थान बचाता है, उच्च घनत्व माउंटिंग के लिए उपयुक्त है, और यांत्रिक झटके और कंपन के प्रति मजबूत प्रतिरोध रखता है (कंपन प्रतिरोध 10G से अधिक है), जो ह्यूमनॉइड रोबोट की उच्च शक्ति घनत्व और उच्च स्थिरता की आवश्यकताओं को पूरा करता है।
प्रस्तावित मॉडल्स: सीएसएजी , सीएसएसी , सीएसएबी , सीएसईबी , सीएसएचबी , आदि।
3.3 SMD पावर इंडक्टर
Codaca SMD पावर इंडक्टर कैमरा मॉड्यूल, ऑडियो मॉड्यूल, DC-DC मॉड्यूल आदि में मुख्य रूप से उपयोग किए जाते हैं, जो छोटे इंडक्टर आकार, बड़ी धारा, उच्च रूपांतरण दक्षता आदि की आवश्यकताओं को पूरा कर सकते हैं।
प्रस्तावित मॉडल्स: एसपीआरएचएस , सीएसयूएस , सीआरएचएसएम , VCRHS , एसपीक्यू , आदि।

मैग्नेटिक घटक प्रौद्योगिकी के क्षेत्र में एक प्रमुख आपूर्तिकर्ता के रूप में, कोडाका इलेक्ट्रॉनिक्स 24 वर्षों से इंडक्टर विकास पर केंद्रित है, और इंजीनियर मानवाकृति रोबोट के प्रत्येक उपसिस्टम की विशिष्ट प्रदर्शन आवश्यकताओं के अनुसार उचित प्रेरकत्व मान, रेटेड धारा, स्विचिंग आवृत्ति, उत्पाद आकार आदि को इंडक्टर के लिए मिलान कर सकते हैं। अधिक विस्तृत जानकारी के लिए कृपया कोडाका के बिक्री कर्मचारियों से संपर्क करें।