
Gyors linkek

Az automatizálás iránti növekvő igény a gyártó- és szolgáltatóiparban gyorsítja a humánoid robotok fejlesztését. A szabadsági fokok (DOF) növekedésével és a környezetre adott válaszsebesség javulásával a humánoid robotok egyre összetettebbé válnak, lehetővé téve, hogy realisztikusabban szimulálják az emberi mozgásokat. A magasabb szabadsági fok azt jelenti, hogy a humánoid robotok több motorhajtásra szorulnak, az induktorok pedig fontos szerepet játszanak a motorvezérlésben, az energiagazdálkodásban és a jelfeldolgozó rendszerekben.

1- Az induktorok fő alkalmazása humánoid robotokban
Az induktorokat elsősorban motorhajtásban, energiagazdálkodásban és jelfeldolgozásban használják humánoid robotokban.
Motorhajtás: A piacon kapható magas színvonalú humanoid robotok általában 40–50 mozgatható motort tartalmaznak, amelyek meghatározzák a robot mozgási szabadságát és rugalmasságát. Az induktor az energiatárolás és az áram simítása révén gördülékenyen forgatja a motort, segítve ezzel a humanoid robot motorvezérlő rendszerét az ízületi mozgás, testtartás-állítás és dinamikus egyensúly elérésében. A motorhajtások és nagy teljesítményű terhelések olyan induktorokat igényelnek, amelyek magas telítési áramjellemzőkkel és nagy áramteherbírással rendelkeznek, hogy képesek legyenek azonnali áramlökések kezelésére. Ugyanakkor csökkenteni kell a veszteségeket a rendszerhatékonyság növelése és az akkumulátor élettartamának meghosszabbítása érdekében.
Energiakezelés: Az induktorok a teljesítménykezelő rendszerek DC-DC átalakítóinak (például buck és boost áramkörök) alapvető elemei, amelyek különböző feszültségszinteken biztosítanak stabil tápfeszültséget az AI processzorokhoz, szenzorokhoz, kommunikációs modulokhoz stb., optimalizálva az energiaelosztást és az átalakítási hatásfokot. Alacsony egyenáramú ellenállás (DCR), magas átalakítási hatásfok a teljesítményveszteség csökkentésére, magas telítési áram és jó hőmérséklet-stabilitás szükséges.
Jel feldolgozás: A jelprocesszáló rendszerekben az induktorok elsősorban a nagyfrekvenciás zaj és az EMI elnyomására szolgálnak, így biztosítva a jel tisztaságát. Például a percepciós rendszerben hozzájárulnak az emberi formájú robotok külső környezetre való érzékeléséhez és interaktív visszajelzéséhez. A kommunikációs és vezérlőrendszerekben az induktorok az EMI tervezés segítségével biztosítják a radar, kamera, vezeték nélküli kommunikáció és egyéb modulok zavartűrő képességét, javítva az eszközök működési stabilitását.
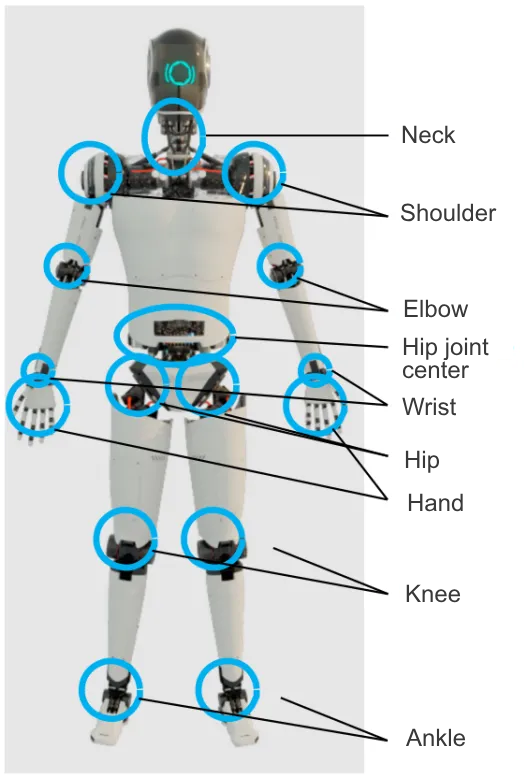
1. ábra: Az emberi alakú robot csuklómotorjának fő helye (TI kép alapján)
2 - A tekercsek iránti igény emberi alakú robotoknál
Az emberi alakú robotok elektronikus rendszere összetett, és a pontos mozgásvezérlés és megbízható kommunikáció eléréséhez elengedhetetlenek az alapvető alkatrészek, például a tekercsek. Az emberi alakú robotok technikai jellemzői szintén meghatározzák a tekercs termékek teljesítményével és szerkezeti kialakításával szemben támasztott magas követelményeket. A követelmények elsősorban a következők:
2.1 Miniatürizálás és nagy teljesítménysűrűség
Az emberi alakú robotok belső tere rendkívül kompakt, számos motort, számítógépes egységet (CPU/GPU), érzékelőket stb. integrálva, így az áramellátó áramkörnek (például POL, pontbeli terhelésátalakító) miniatűrré kell lennie. A tekercseknek kicsiknek és könnyűeknek kell lenniük, hogy illeszkedjenek a kompakt szerkezeti kialakításba, ugyanakkor magas teljesítménysűrűséggel is rendelkezniük kell, hogy kis helyen nagy teljesítményt lehessen elérni. A formázott vagy árnyékolt felépítésű tekercsek nagyon nagy telítődési áramot és hőmérséklet-emelkedési áramot képesek elviselni kis méretben, ami elengedhetetlen a nagy teljesítményű kimenet eléréséhez korlátozott térben.
2.2 Erős elektromágneses interferencia-ellenálló képesség
A robotok belső elektromágneses környezete összetett, magas sebességű digitális áramkörökkel, erős kapcsolási zajjal a motorvezérlőktől és érzékeny szenzorokkal (például IMU-kkal és kamerákkal). A nem árnyékolt tekercsek használata erős mágneses mezőt hoz létre, és elektromágneses zavarforrássá válik, ami komolyan befolyásolhatja a szenzorok leolvasásának és a vezérlőrendszernek a stabilitását. Az árnyékolt tekercsek minimális mágneses szivárgással rendelkeznek, hatékonyan csökkentve az elektromágneses zavart, és biztosítják a rendszerben lévő más alkatrészek megbízható működését. Ezért az öntött tekercsek, nagy áramú teljesítménytekercsek és más mágnesesen árnyékolt felépítésű teljesítménytekercsek ideálisabb választásnak számítanak.
2.3 Nagy telítődési áram
A robot dinamikus terhelése drasztikusan megváltozhat, például hirtelen indításkor, futás közben vagy nehéz tárgyak felemelésekor a motor és a számítóegység árama pillanatok alatt megnő. Az induktor képesnek kell lennie arra, hogy elkerülje a mágneses telítődést magas áramoknál (azaz az induktivitás értéke ne csökkenjen meredeken), különben az áramkör kormányozhatatlanná válik, ami a rendszerfeszültség összeomlásához és újrainduláshoz vezethet. Ezért az induktivitásnak "lágy telítődési" jellemzővel kell rendelkeznie, azaz amikor a telítődési áram közelébe kerül, az induktivitás értéke lassan csökkenjen, ne pedig szakadésszerűen. Ez biztosít pufferelést az áramellátás szabályozó rendszerének, és növeli a rendszer megbízhatóságát.
2.4 Kiváló rezgés- és ütésállóság
Az emberi alakú robotok gyakran mozognak, jelentős mechanikai rezgés éri őket, ezért az indukciós tekercsnek rezgés- és ütésállónak kell lennie, forrasztott kapcsolatainak szilárdaknak kell lenniük, továbbá a házának és a belső tekercsnek ellen kell állnia a mechanikai terheléseknek. Az öntött szerkezetű induktor teljesen szilárdítja a tekercset a mágneses anyagon belül, amely így rendkívül magas mechanikai szilárdsággal rendelkezik, és kiváló ütésállósággal bír, ezért széles körben használják emberi alakú robotrendszerekben.
2.5 Magas frekvenciás és magas hőmérsékletű környezetekhez való alkalmazkodás
Az induktornak jó nagyfrekvenciás tulajdonságokkal kell rendelkeznie, hatékonyan kell csillapítania a nagyfrekvenciás zavarokat, csökkentenie kell a hullámosságot és a zajt, valamint alacsony energiaveszteséget kell fenntartania magas frekvencián, hogy javítsa az átalakítási hatásfokot.
Ezenkívül az induktornak képesnek kell lennie az indukciós érték stabilitásának fenntartására magas hőmérsékleti környezetben, a Q érték csökkenésének minimálisra csökkentésére, és a teljesítmény romlásának megelőzésére, így biztosítva, hogy a robot indukciós teljesítménye megbízható legyen hosszú távú működés során.
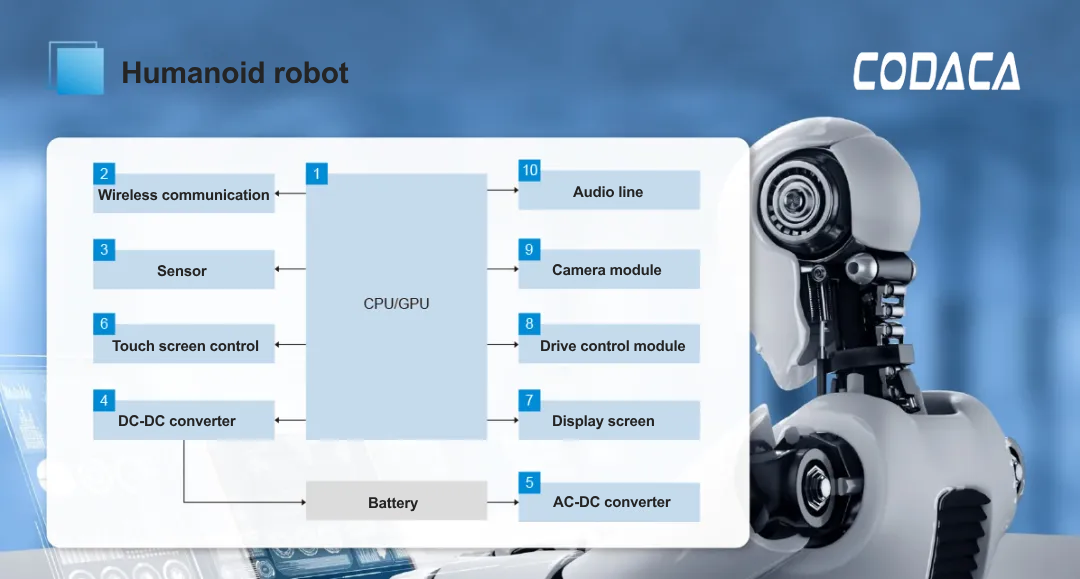
2. ábra Az induktor alkalmazása humánoid robotban
3- Codaca induktoros megoldás humánoid robotokhoz
Olyan alkalmazásoknál, mint a humánoid robotok, amelyek magas teljesítménysűrűséget, magas hatékonyságot, magas megbízhatóságot, összetett EMI környezetet és szigorú mechanikai feltételeket kombinálnak, a nagyáramú, árnyékolt, ötvöspor maggal rendelkező induktorok letisztult főáramkör-választássá váltak az áramkörökben, különösen a POL tápegységek esetében a központi számítási egységekhez és az ízületi motorhajtásokhoz, teljesítményük széleskörű előnyei miatt. Tervezése tökéletesen kiegyensúlyozza a teljesítmény, méret és megbízhatóság három alapvető kihívását.
A Codaca független kutatás és fejlesztés, valamint technológiai innováció révén adaptív indukciós megoldásokat kínál humánoid robotok számára, és több kategóriájú, valamint modelljű terméket is piacra dobott, mint például mágneses árnyékolt szerkezetű nagyáramú teljesítmény indukciók, vékony és könnyű formázott indukciók, valamint közös módusú zavarszók. Különböző elektromos jellemzőket kínál, melyek kielégítik a humánoid robotok különböző forgatókönyveiben szükséges nagy teljesítményű indukciók követelményeit, és széles körben alkalmazzák robotok kommunikációs és navigációs moduljaiban, teljesítmény modulokban, motorhajtás modulokban, robotvezérlő lapokban és egyéb modulokban.
3.1 Kompakt nagyáramú teljesítmény induktor
Kompakt nagy áramú teljesítmény induktorok főként humanoid robotok motorhajtásában és energiagazdálkodó rendszereiben használt DC-DC modulokban alkalmazzák. A nagyáramú tekercselés a Codaca által önállóan fejlesztett alacsony veszteségű fém mágnesező porból készül, amelynek jellemzői a magas telítési áram, alacsony veszteség, magas hatásfok és magas működési hőmérséklet, így biztosítva a humanoid robotok teljesítményét és üzemidejét. A nagyáramú tekercselés értéke akár 422 A is lehet, a működési hőmérséklet pedig akár 170 °C-ig terjedhet. Ugyanakkor a termék mágneses árnyékoló szerkezetet alkalmaz, amely kiváló elektromágneses interferencia-ellenállással rendelkezik. Így teljes mértékben kielégíti a humanoid robotok igényeit a magas telítési áram, magas működési hőmérséklet és alacsony elektromágneses zavar tekintetében.
Ajánlott modellek: CSBX , CSBA , CSCM , CSUT , CSCIL , stb.

3.2 Vékony és könnyű formázott induktivitások
Formázott indukciós tekercseket főként humanoid robotos kijelzőmodulokban, érintőképernyős vezérlőmodulokban, DC-DC modulokban stb. használatosak. A formázott teljesítményfojtók a CODACA által önállóan fejlesztett alacsony veszteségű ötvözetporból készülnek, amely alacsony veszteségű, magas hatásfokú, széles frekvenciatartományban alkalmazható, és az alacsony zajszintet ultra alacsony szintre csökkenti. Vékony és könnyű kialakítású (minimális méret: 2 mm), takarékos a nyomtatott áramkör (PCB) helyfelhasználásában, alkalmas nagy sűrűségű elhelyezésre, erős mechanikai ütés- és rezgésállósággal rendelkezik (rezgésállóság több mint 10G), kielégítve a humanoid robotok magas teljesítménysűrűség- és magas stabilitásigényét.
Ajánlott modellek: CSAG , CSAC , CSAB , CSEB , CSHB , stb.
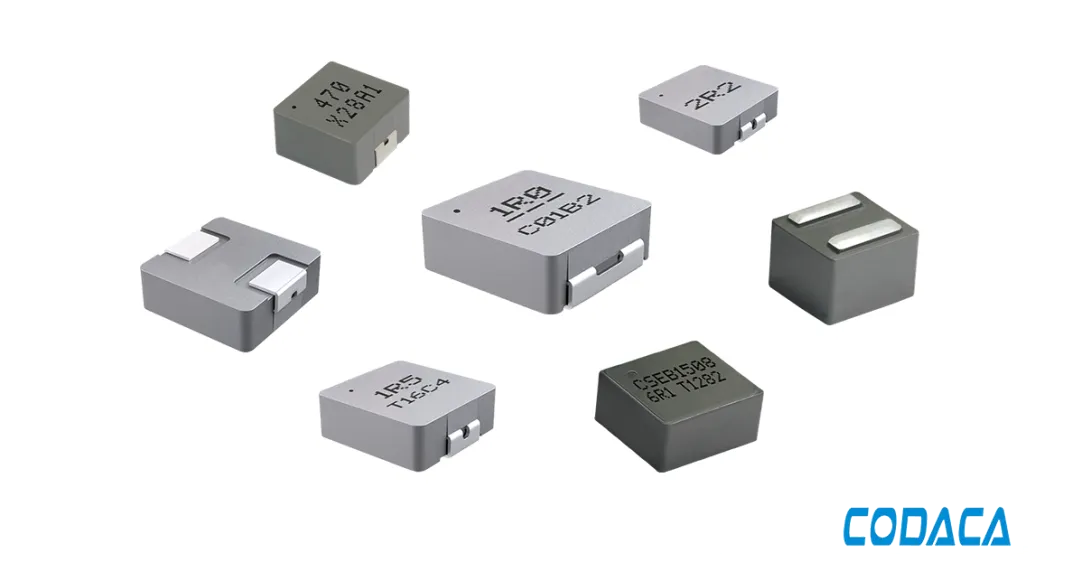
3,3 SMD teljesítményinduktor
Codaca SMD teljesítményinduktorok főként kameramodulokban, audiomodulokban, DC-DC modulokban stb. használatosak, kielégítve a kisméretű induktorokkal szemben támasztott követelményeket, mint például nagy áramerősség, magas átalakítási hatásfok stb.
Ajánlott modellek: SPRHS , CSUS , CRHSM , VCRHS , SPQ , stb.

A Codaca Electronics a mágneses komponens technológia vezető szállítója, amely már 24 éve az induktorok fejlesztésére koncentrál, és mérnökei az ember alakú robotok egyes alrendszereinek specifikus teljesítménykövetelményeihez igazodva tudják kiválasztani a megfelelő induktivitásértéket, névleges áramot, kapcsolási frekvenciát, termék méretét stb. az induktorokhoz. További részletes információkért forduljon a Codaca értékesítési stábjához.