
Collegamenti rapidi

Lo sviluppo rapido del settore dei veicoli a nuova energia ha determinato una crescita esplosiva lungo diverse catene industriali. L'intelligenza veicolare e la guida autonoma sono diventate le direzioni strategiche più critiche per i veicoli a nuova energia, portando nuove sfide e opportunità per cervelli centrali altamente integrati e controller di dominio, in particolare in termini di affidabilità, elevata densità di potenza, compatibilità elettromagnetica degli alimentatori switch-mode (EMC), alta efficienza ed elevato rapporto costo-prestazioni delle alimentazioni DC-DC a commutazione.
Qualcomm, in qualità di fornitore di controller di dominio per cockpit intelligenti, detiene una posizione rilevante con gli SA8155 e SA8295. I conflitti tra corrente transitoria, corrente operativa stabile, efficienza energetica in standby, costo e progettazione EMC del convertitore switching (SMPS) della potenza primaria del SoC del controller centrale (alimentazione proveniente dall'ingresso della batteria alla conversione primaria) rappresentano una sfida importante per la progettazione dell'alimentatore BUCK. Come risolvere e bilanciare questi conflitti costituisce la direzione tecnica in cui architettura del convertitore switching, circuiti integrati per l'alimentazione, induttori, MOSFET e condensatori lavorano insieme.
Questo articolo combina la progettazione dell'alimentazione principale del controller di dominio centrale per applicazioni automobilistiche con un'ampia corrente dinamica di alimentazione a commutazione (100-300%), esplorando la progettazione di alimentatori DC-DC a commutazione, inclusi soluzioni di alimentazione e metodi di selezione di induttori e condensatori. Viene discussa e implementata una progettazione pratica affrontando le sfide relative a dimensioni, costo, efficienza e prestazioni.
Questo articolo prende come esempio il controller di dominio SA8295 di Qualcomm per esplorare e implementare la progettazione pratica dell'alimentatore primario BUCK a commutazione.
Questa serie di articoli comprende tre parti (in continuo aggiornamento):
01- Decodifica della Progettazione dell'Alimentazione Primaria del Controller di Dominio Automobilistico Qualcomm: Progettazione e Calcolo dell'Alimentazione (questo capitolo)
1- Obiettivi e sfide della progettazione
1.1 Requisiti di Corrente Transitoria per SA8295

Tabella 1: Requisiti di Progettazione Alimentare per SA8295
1.2 Requisiti della corrente in standby SA8295
Consumo di alimentazione in standby del SoC Qualcomm a 3,3V entro 4-7,5 mA (incluso il consumo per il refresh automatico della memoria), supporta il risveglio da standby.
Central Brain (Cabin Domain Controller) consumo di corrente totale del veicolo 7-10mA (13,5V), il modulo 4G/5G consuma da solo 4-5mA, Qualcomm SA8295 corrente a 13,5V 3mA (40mW) o inferiore.
1.3 Tre sfide
1.3.1 Sfida 1: Uscita di corrente dell'alimentatore switching del Domain Controller Qualcomm SA8295
Corrente transitoria elevata, 3,3V, 18 ampere (0,1ms), 0,1ms è già un periodo lungo per l'uscita in regime permanente di un alimentatore switching DC-DC, richiede che l'alimentatore buck sia progettato per un'uscita stabile di 18 ampere.
1.3.2 Sfida 2: Dinamica dell'alimentatore switching ad alta qualità per Domain Controller SA8295
La corrente di lavoro in regime permanente del domain controller SA8295 è di 5-9 ampere, il che provoca una differenza di corrente operativa stabile superiore al 300% nell'induttanza dell'alimentatore switching (l'induttanza è inversamente proporzionale alla corrente nominale) in termini di volume, costo e frequenza, generando significativi conflitti.
1.3.3 Sfida 3: Efficienza micro-power dell'alimentatore switching ad alta qualità per Domain Controller SA8295
Il consumo di energia in standby, con un'efficienza del 70% a 13,5 V e 3 mA, rappresenta una grande sfida per l'architettura del controller di alimentazione e la progettazione della selezione dell'induttore.
Questa progettazione si basa sulla sfida rappresentata dalla massima progettazione dell'alimentazione primaria buck SA8295, esplorando le difficoltà principali delle soluzioni tecnologiche per alimentatori switching e DC-DC.
2- Confronto nella selezione della soluzione
2.1 Requisiti tecnici per l'alimentazione del dominio di controllo Qualcomm SA8295
Come mostrato nella tabella 2:
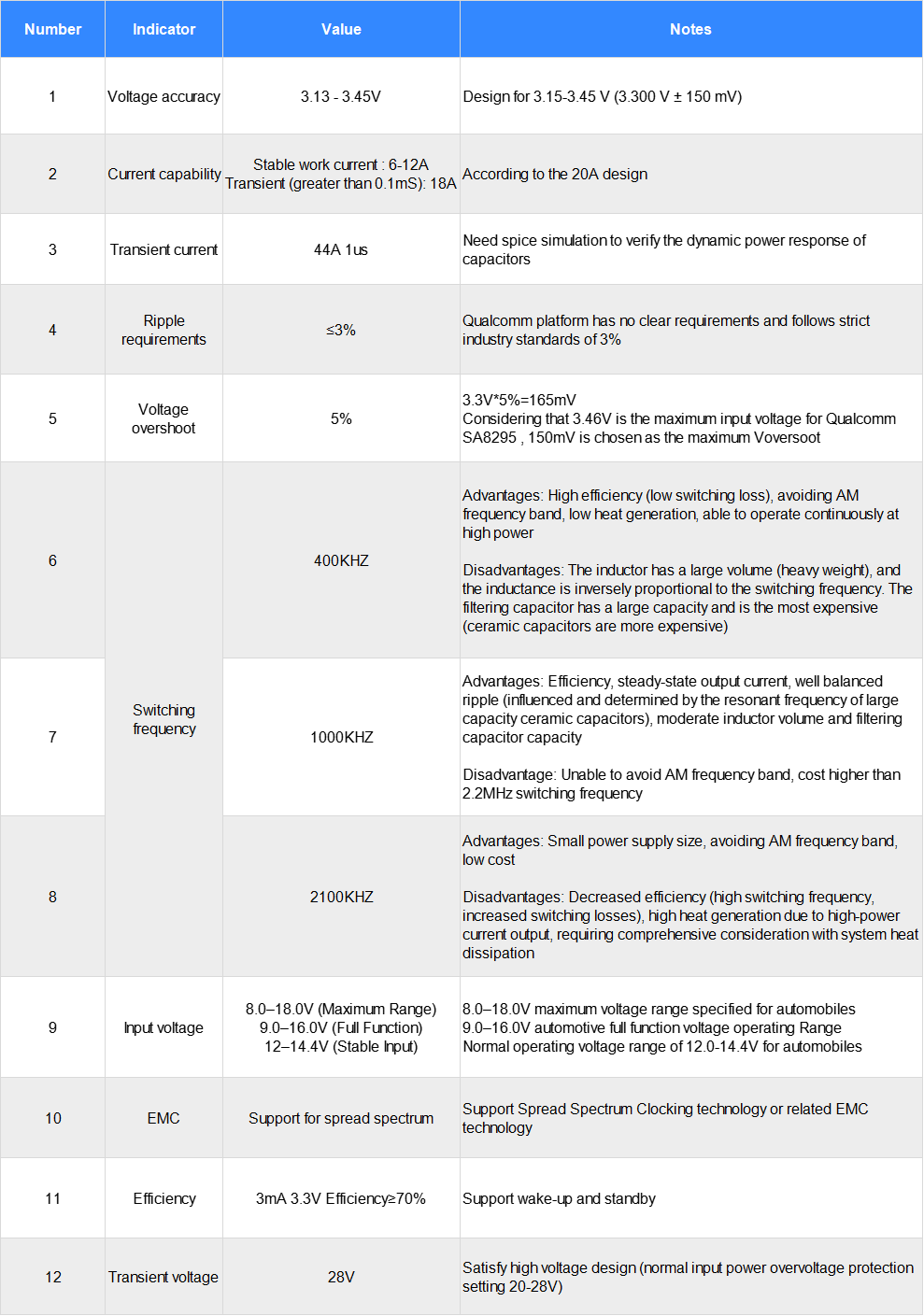
Tabella 2: Requisiti di specifica tecnica per la progettazione dell'alimentazione Qualcomm SA8295
2.2 Schema di progettazione e documenti tecnici
MPQ2918, MPQ2930, LM25141-Q1, MAX20098, LTC7803, LM25149-Q1, ecc., possono tutti soddisfare i requisiti di progettazione. Questo progetto seleziona LM25149-Q1 come schema di progettazione dell'alimentazione primaria per il controller del dominio centrale nel presente progetto.
2.2.1 Indirizzo ufficiale LM25149-Q1:
https://www.ti.com.cn/product/cn/LM25149-Q1?keyMatch=LM25149-Q1
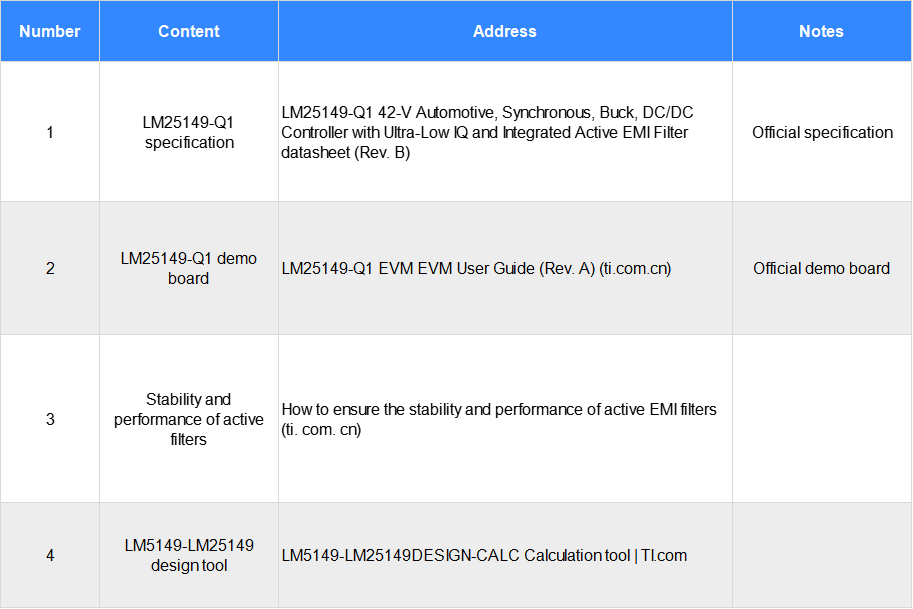
Tabella 3: Materiali di riferimento per la progettazione LM25149-Q1
2.2.2 Scheda tecnica LM25149-Q1:
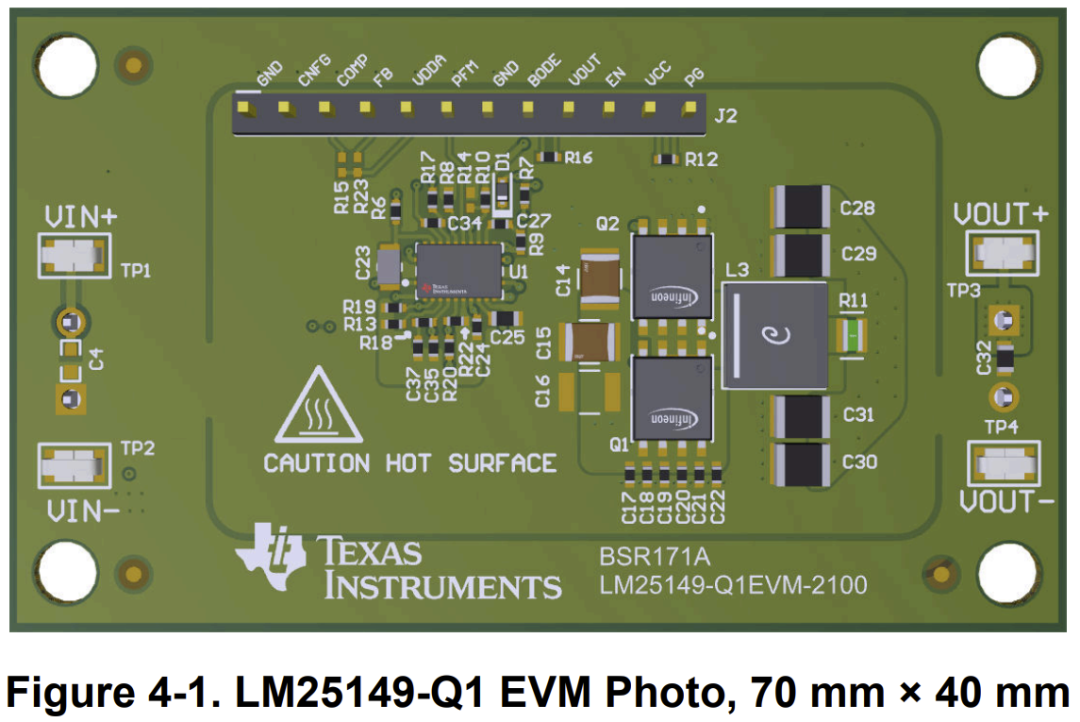
2.2.3 Scheda di sviluppo LM25149-Q1:
Guida utente per EVM LM25149-Q1 (Rev. A) (ti.com.cn)
2.2.4 Stabilità e prestazioni del filtro attivo:
Come garantire la stabilità e le prestazioni dei filtri EMI attivi (ti.com.cn)
2.2.5 LM5149-LM25149 Strumenti di Progettazione :
Strumento di calcolo LM5149-LM25149DESIGN-CALC | TI.com
3- Alimentatore sincrono BUCK: progettazione e calcolo
3.1 Specifiche principali e parametri di progetto del LM25149
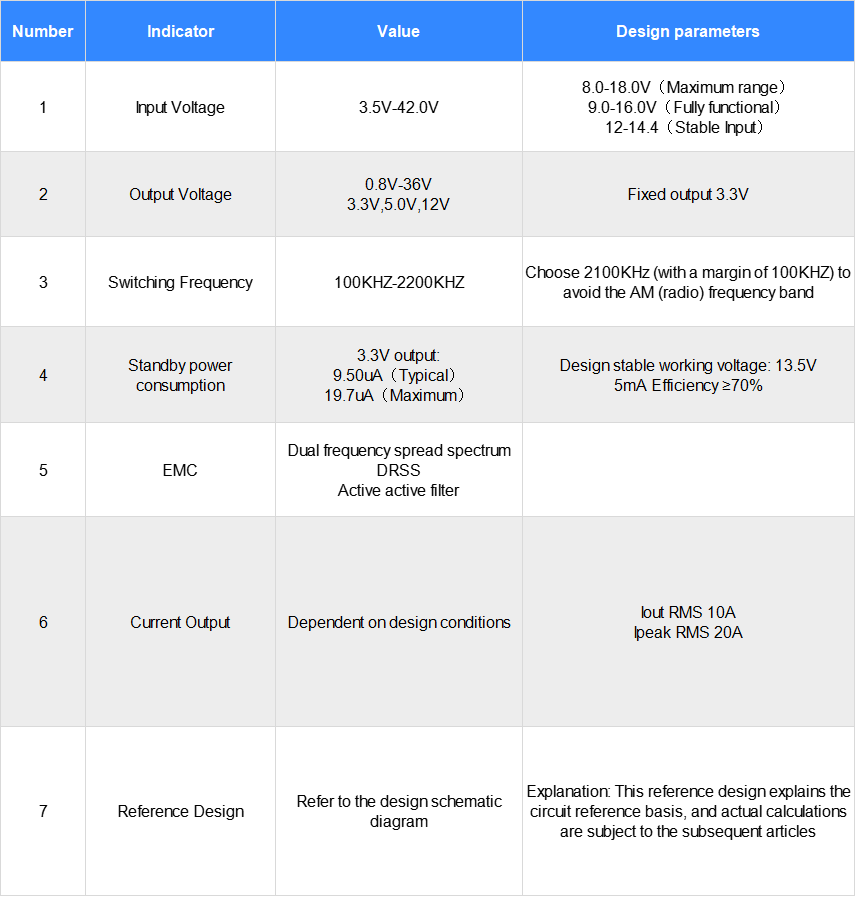
Tabella 4: Requisiti di specifiche tecniche per la progettazione dell'alimentazione Qualcomm SA8295
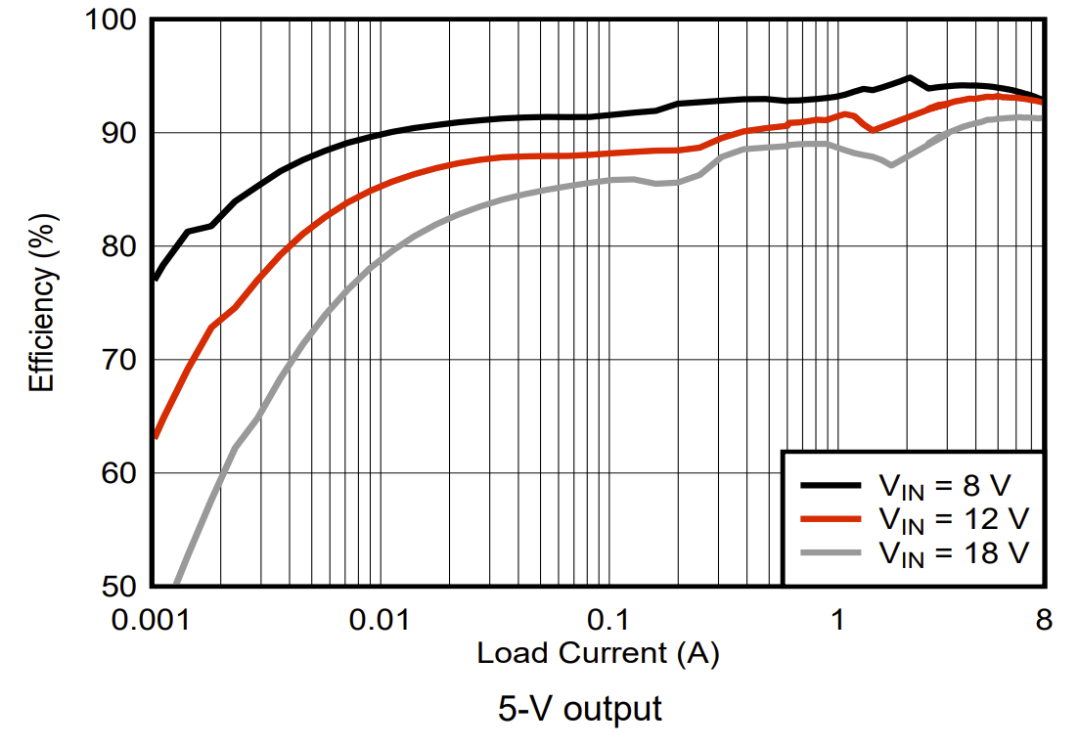
Efficienza
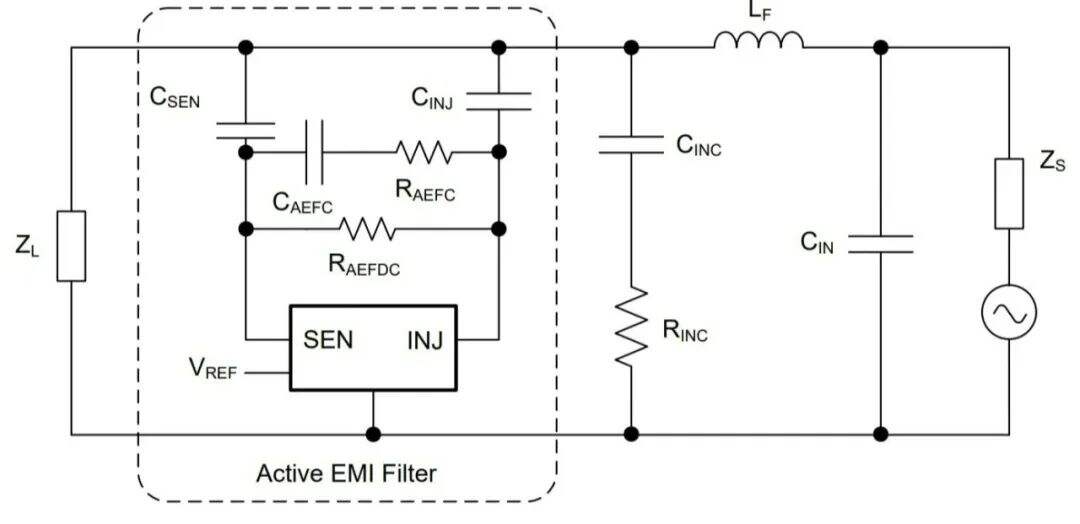
Filtri EMI Attivi
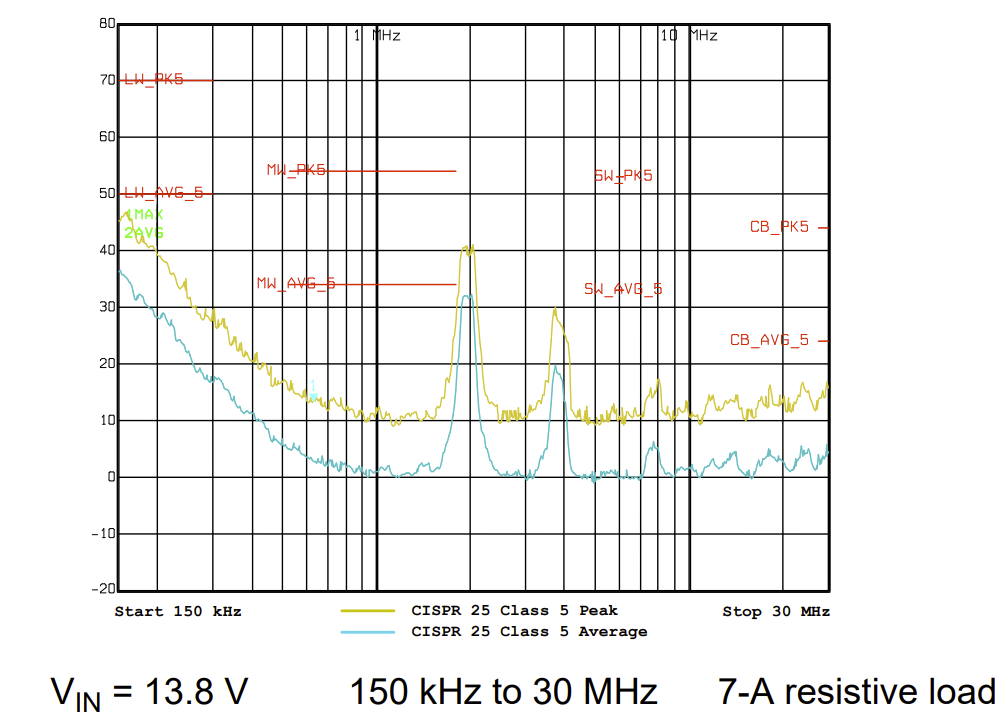
Test EMI
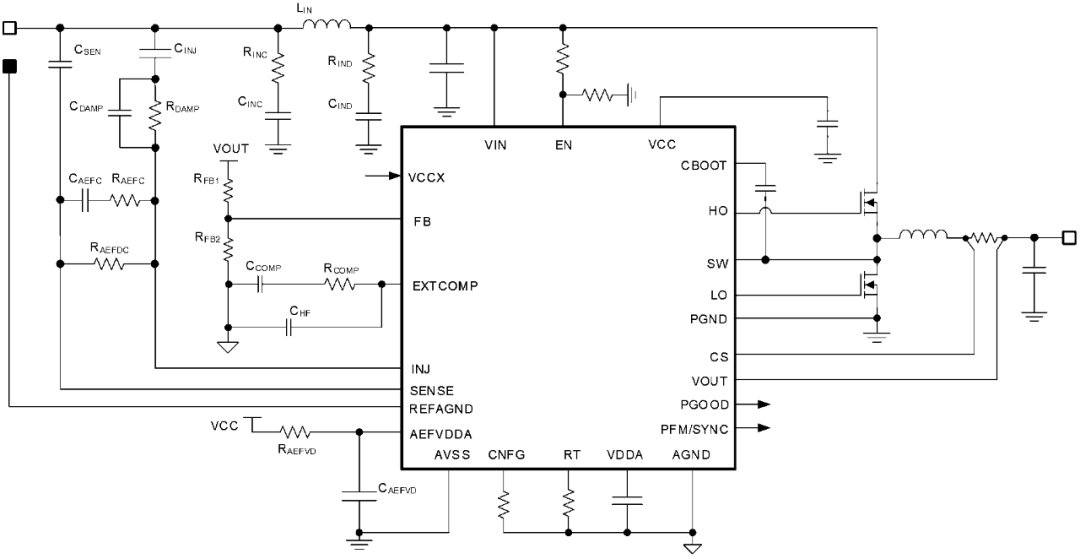
Schema del Design di Riferimento
Scheda di Valutazione della Soluzione Design di Riferimento
3.2 Calcolo dell'Induttore per LM25149 Synchronous BUCK
3.2.1 Formula di calcolo dell'alimentatore switching Synchronous BUCK:
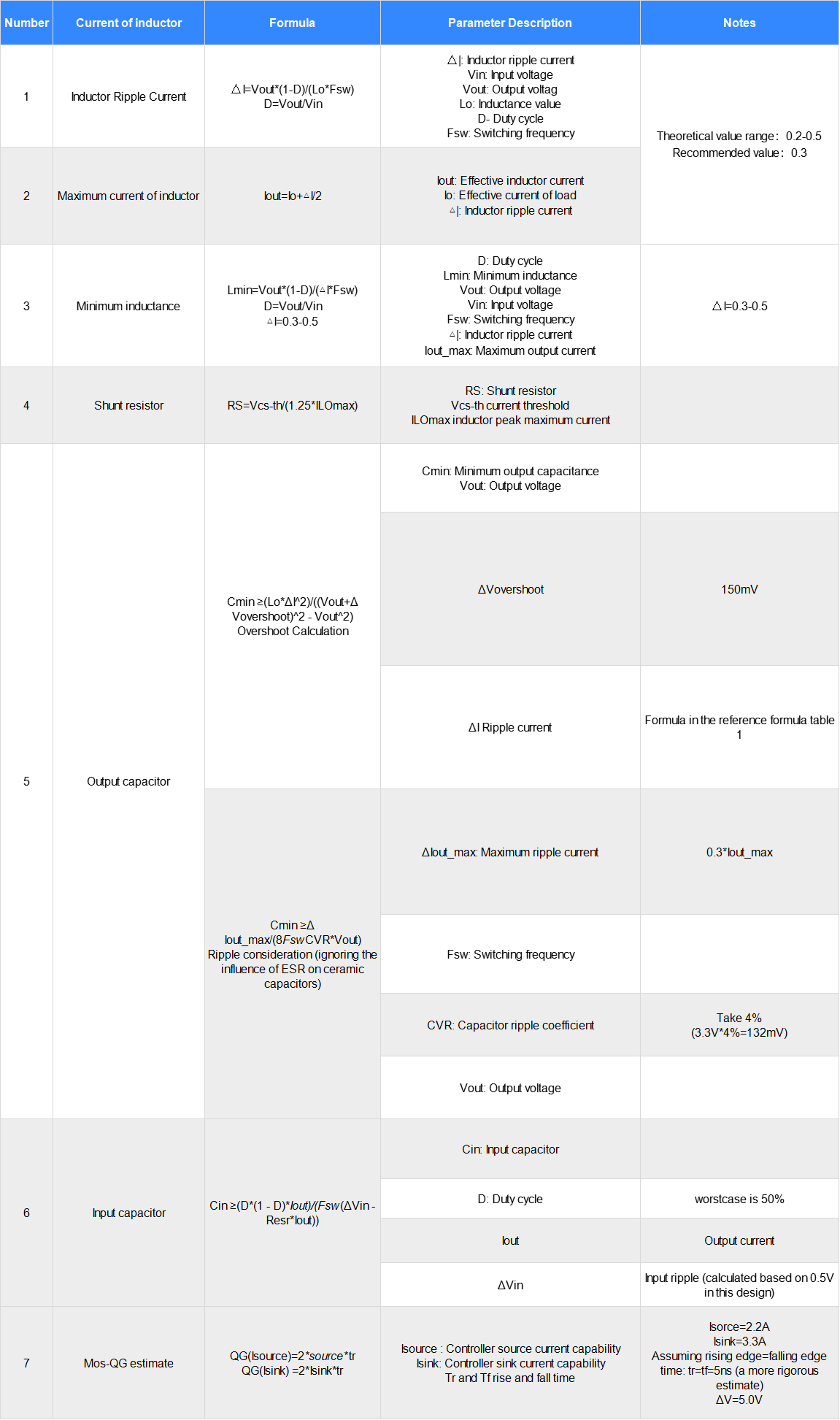
Tabella 5: Formule di calcolo per la progettazione dell'alimentatore BUCK sincrono
3.3 Calcolo dell'induttanza minima
(Formula di calcolo, vedere Tabella 5.)
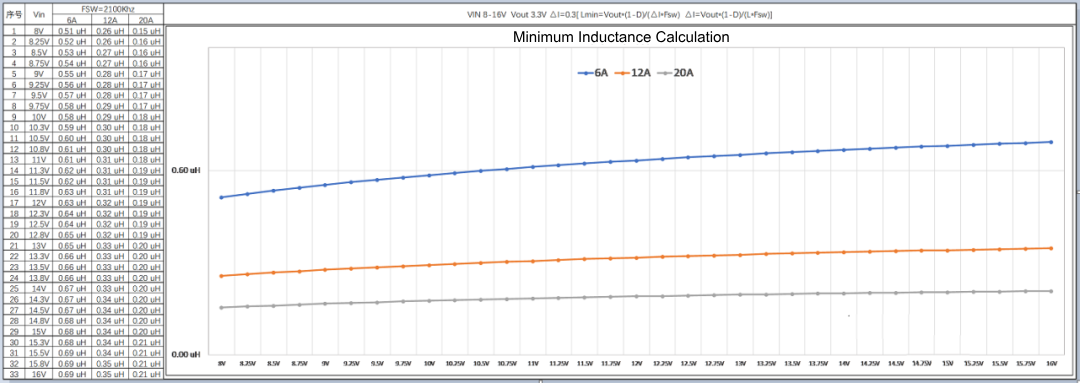
Tabella 6: Grafico della curva di calcolo dell'induttanza minima (∆I=0,3)
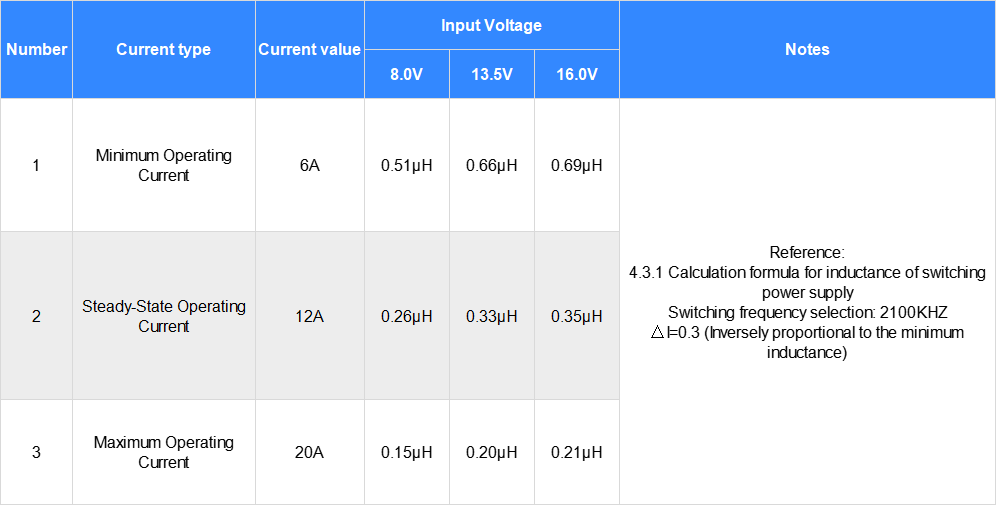
Tabella 7: Calcolo dell'induttanza minima
3.3.1 Sintesi dei dati di calcolo dell'induttanza:
① Se la progettazione copre il range 6-20A (calcolo AI=0,3), con un ingresso di 16V e un'uscita di 6A, l'induttanza deve essere ≥0,69μH.
② Calcolo teorico dell'induttanza Lmin per l'alimentatore a commutazione: ≥ 0,69μH (teorico);
③ Considerando la selezione effettiva nella progettazione e la tolleranza dell'induttore ±20%, scegliere 0,82μH e 1,0μH come soluzione ottimale (l'aumento del valore di induttanza comporta un aumento delle dimensioni, del costo e una riduzione della SRF).
3.4 Calcoli della corrente dell'induttore
(Formula: fare riferimento alle tabelle 5, punti 1 e 2)
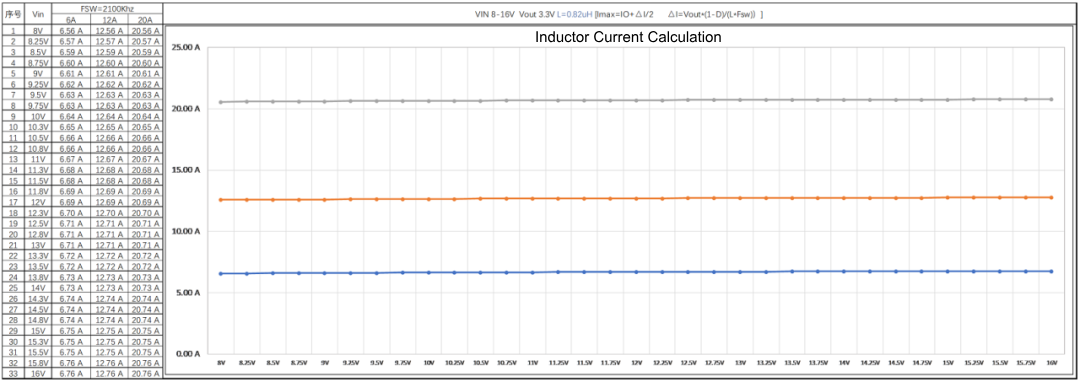
Tabella 8: Calcolo della corrente dell'induttore da 0,82μH
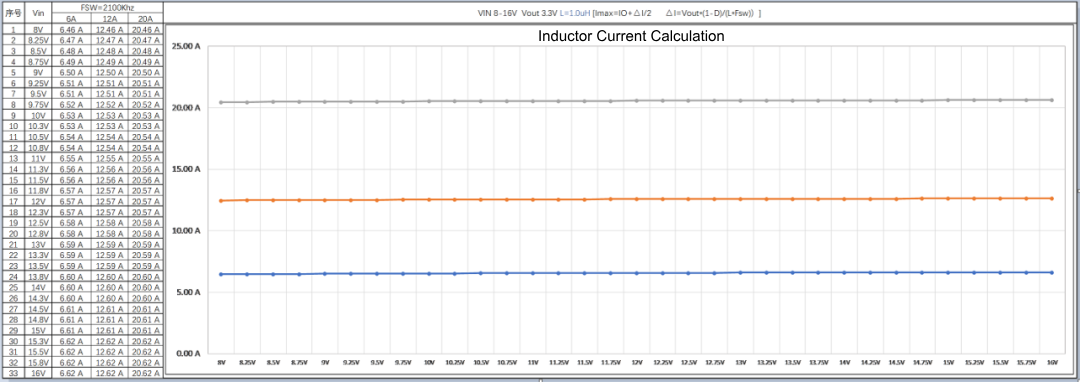
Tabella 9: Calcolo della corrente dell'induttore da 1,0μH
3.4.1 Corrente di saturazione teorica dell'induttanza ≥ 20,76A, arrotondata a 21A:
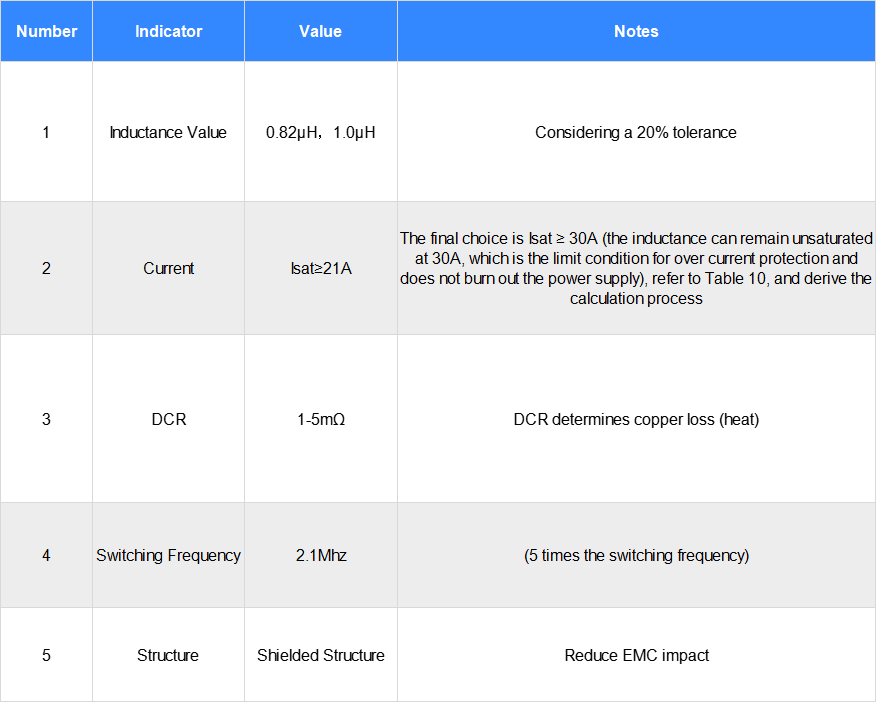
Tabella 10: Specifiche dell'induttore
4- Selezione dell'induttore per l'alimentatore a commutazione
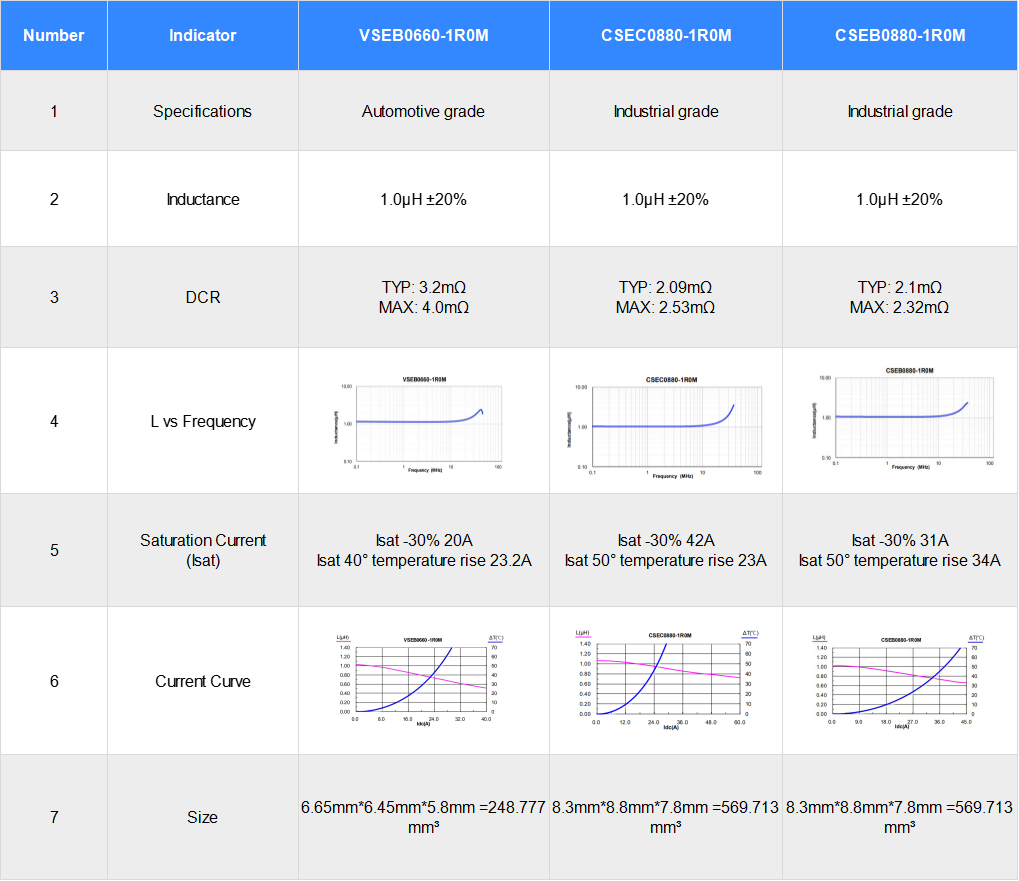
Tabella 11: Selezione dell'induttore
4.1 Calcolo della resistenza di campionamento della corrente per alimentatore a commutazione LM25149
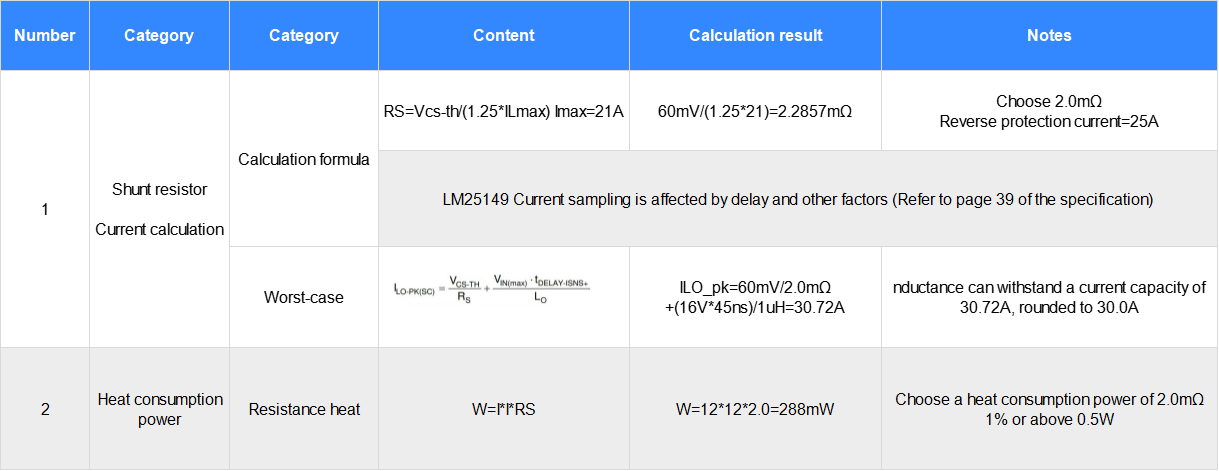
Tabella 12: Calcolo teorico della resistenza di campionamento della corrente
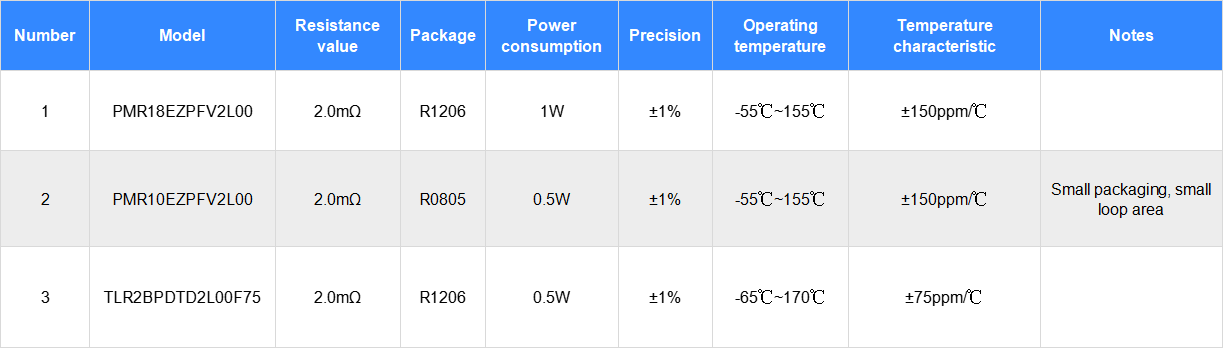
Tabella 13: Selezione della resistenza di campionamento della corrente
4.2 Calcolo del condensatore di uscita per l'alimentatore a commutazione BUCK sincrono
(Calcolo del condensatore di uscita: fare riferimento all'equazione riportata nella Tabella 5)
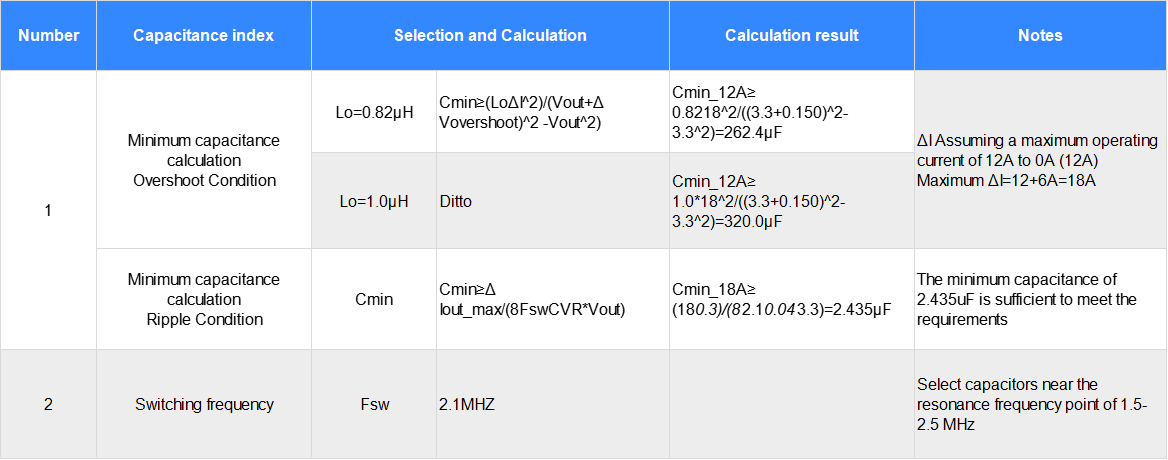
Tabella 14: Calcolo del condensatore di uscita per l'alimentatore a commutazione BUCK sincrono
Nei progetti di alimentatori a commutazione sincroni buck, esiste un compromesso tra prestazioni, dimensioni e costo dei condensatori del filtro di ingresso e di uscita. I test di verifica delle specifiche dei condensatori vengono effettuati in condizioni specifiche e le variazioni degli strumenti di misura durante i test possono produrre scostamenti del 10-50% per specifiche identiche. Le prestazioni definitive del progetto richiedono una validazione scientifica e test attraverso il processo di debug (non esiste un'unica soluzione ottimale; solo la selezione di una soluzione adatta all'applicazione specifica).
I condensatori di commutazione devono soddisfare: Capacità ≥ 320uF (requisito di overshoot), capacità del condensatore ceramico maggiore di 2,435uF (non una condizione fondamentale, è sufficiente soddisfare il requisito).
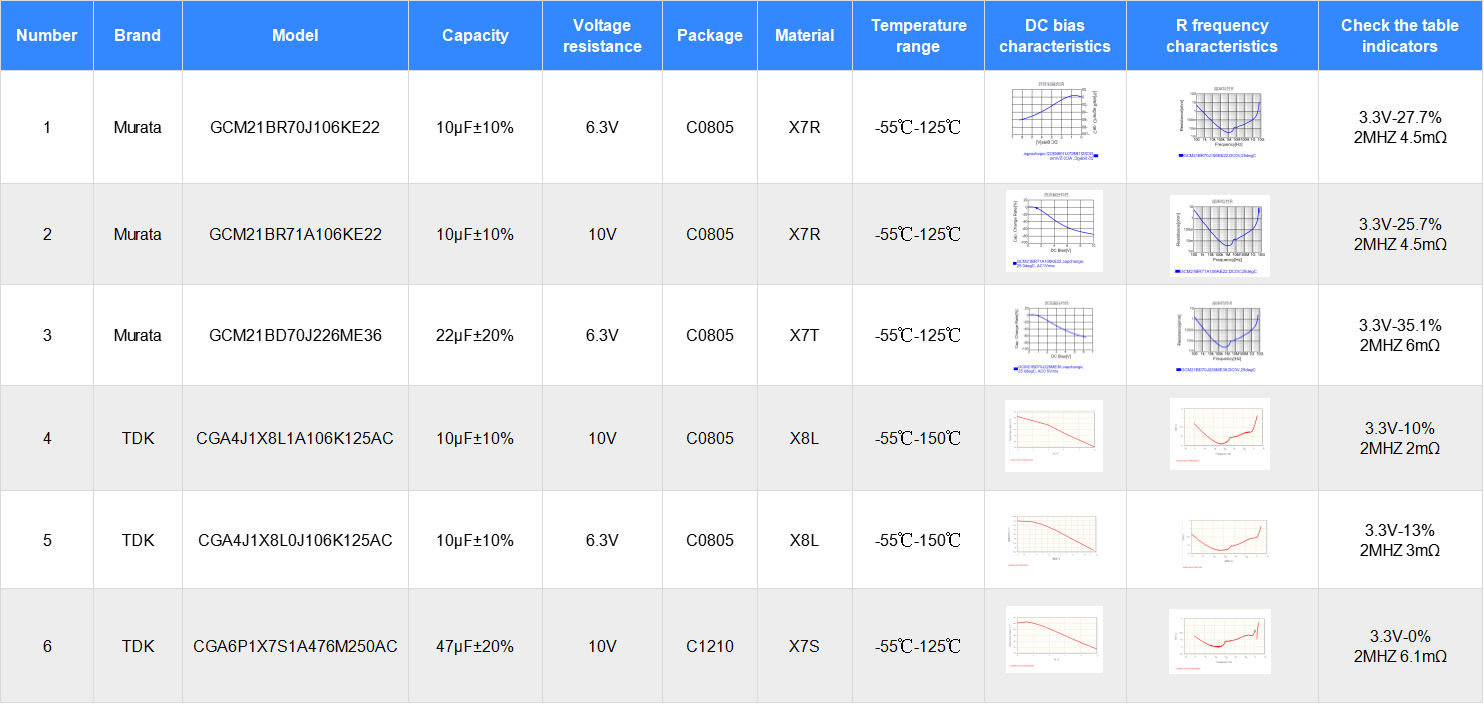
Tabella 15: Selezione consigliata dei modelli di condensatori del filtro di uscita per l'alimentatore a commutazione
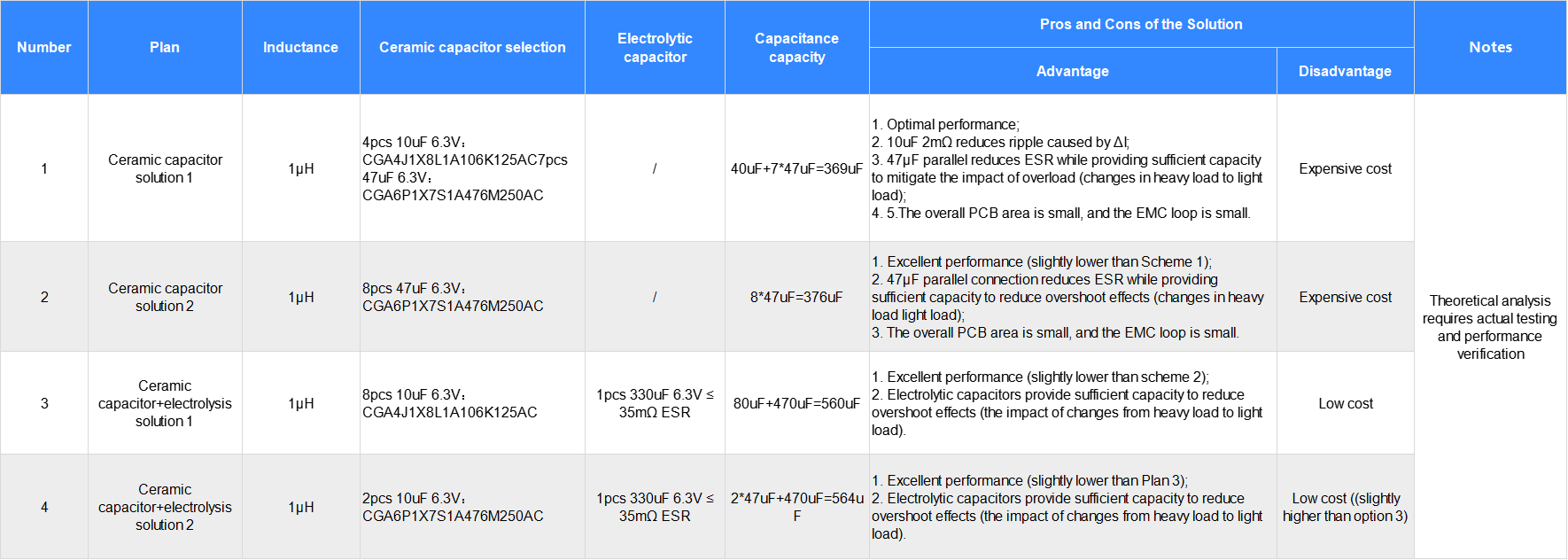
Tabella 16: Progettazione dei condensatori del filtro di uscita per gli alimentatori a commutazione
4.3 Calcolo del condensatore di ingresso per l'alimentatore LM25149
4.3.1 Calcoli della capacità di ingresso

Tabella 17: Calcolo del condensatore del filtro di ingresso per l'alimentatore a commutazione
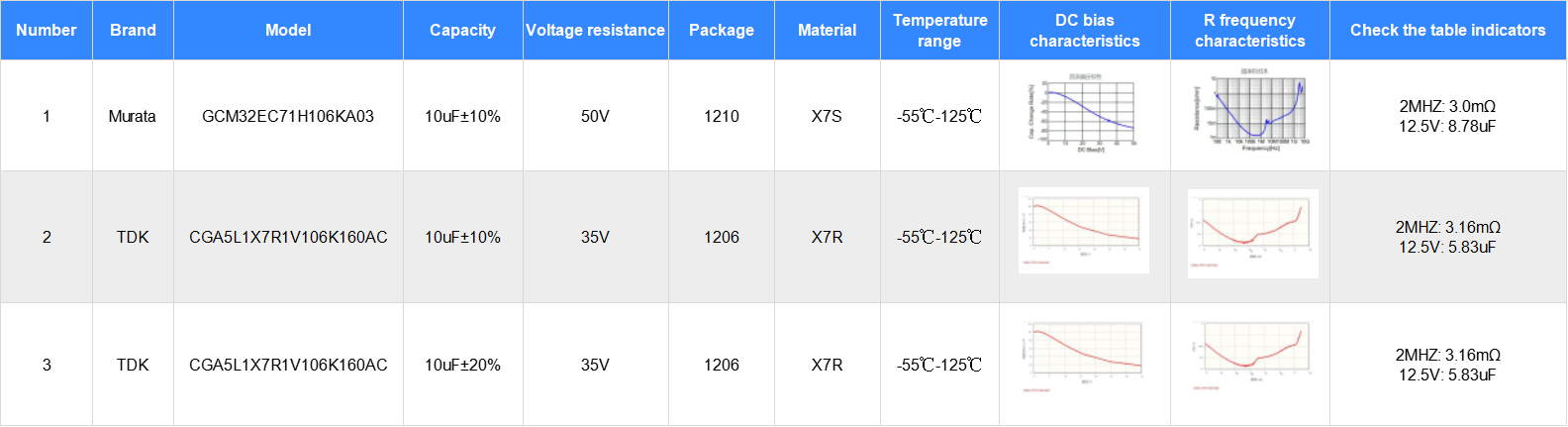
Tabella 18: Selezione dei filtri di uscita per gli alimentatori a commutazione
4.4 Calcolo per la selezione dei Mosfet LM25149
4.4.1 Calcolo del MOSFET
Il datasheet del LM25149 non include molti calcoli e procedure di selezione. I calcoli e le scelte relativi a QG si basano su stime empiriche e deduzioni inverse. I risultati dei calcoli indicano un valore di Vgs pari a 4,5-5,0 V e ≤22 nC. Il processo di calcolo è mostrato nella tabella sottostante. La piattaforma Miller è scelta tra 2-3 V (accettabile anche un valore prossimo a 3 V) e Rdson è scelto con valore ≤8 mΩ.
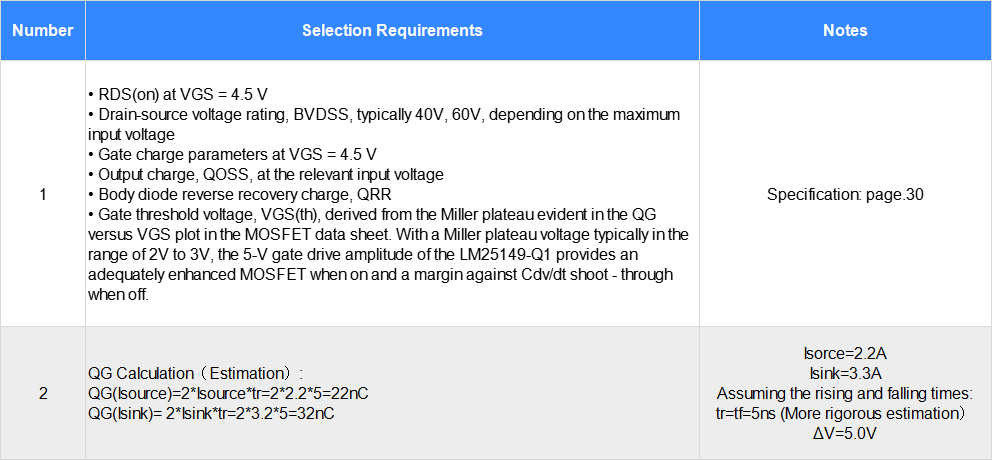
Tabella 19: Selezione e calcoli Mosfet
4.5 Raccomandazioni per la selezione dei Mosfet
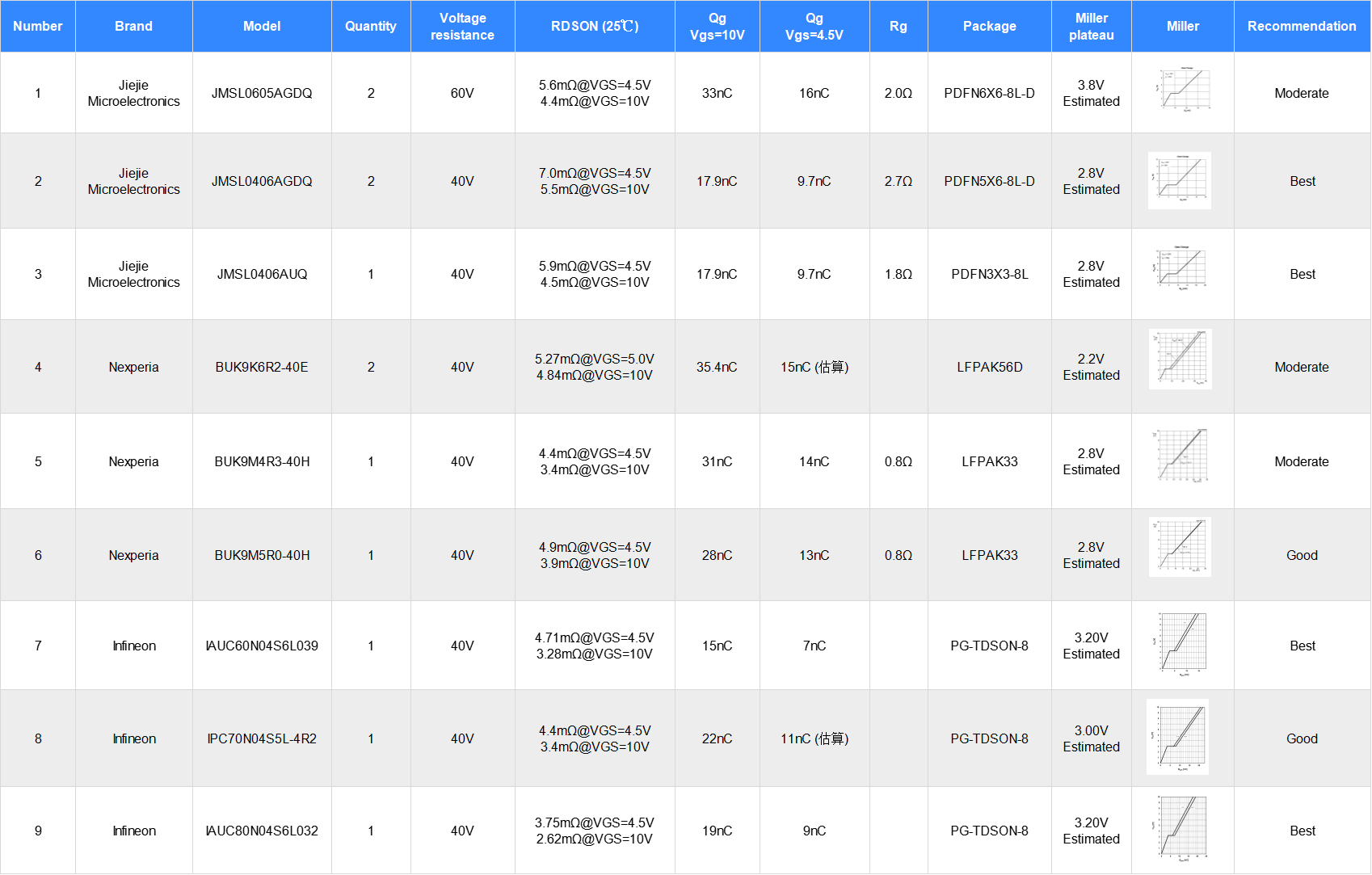
Tabella 20: Modelli di selezione Mosfet
4.6 Calcoli del FB e della compensazione LM25149
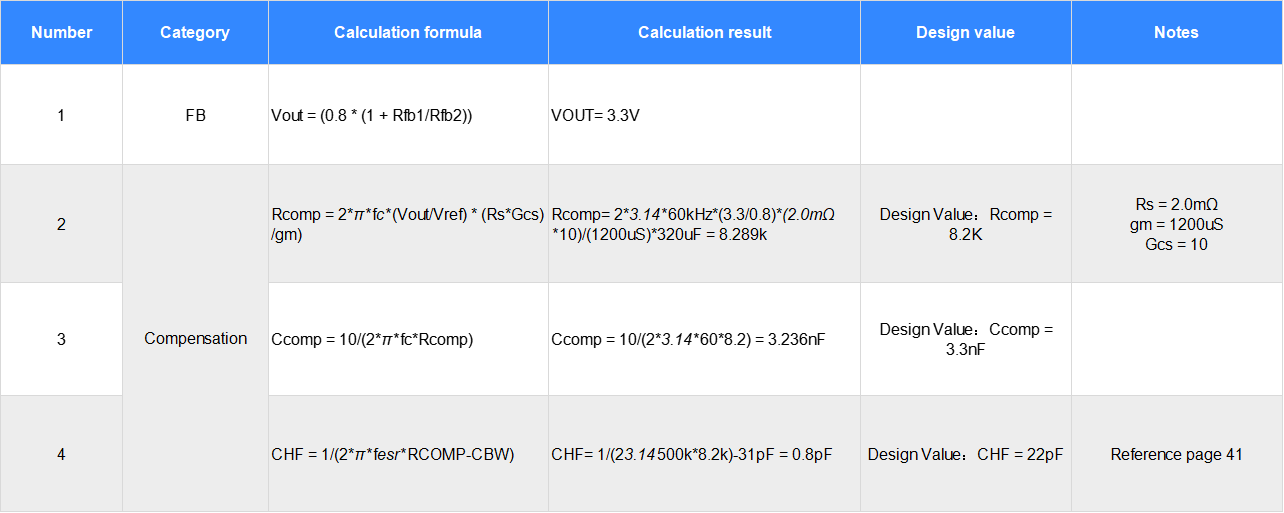
Tabella 21: Calcoli di FB e compensazione
5.7 Calcolo della progettazione EMC per LM25149
Senza approfondire troppe analisi, fare riferimento alle specifiche.
5- Sintesi del progetto
5.1 Sintesi della progettazione e selezione dell'alimentatore BUCK con LM25149
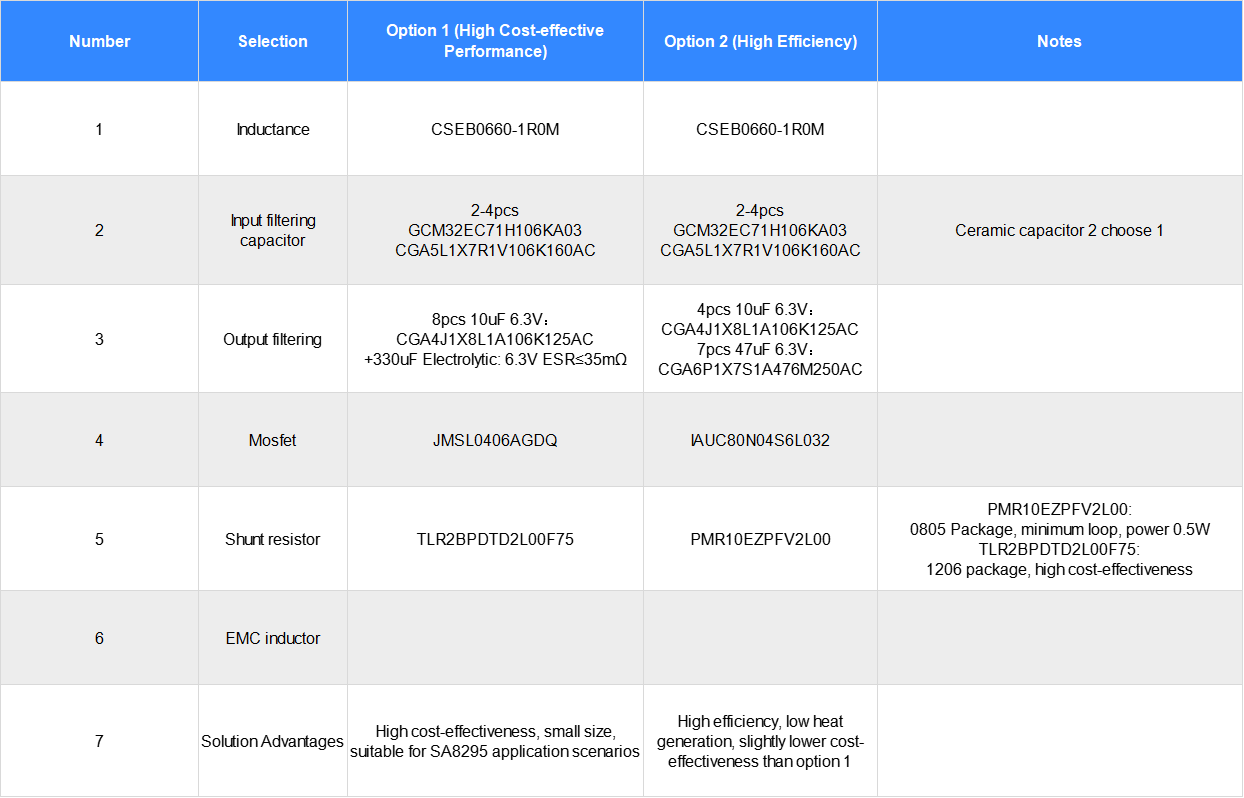
Tabella 22: Progettazione e Selezione
5.2 Sintesi della soluzione
Le prestazioni e l'efficienza degli alimentatori a commutazione sincroni sono influenzate da molti fattori. Le prestazioni e le specifiche devono tenere conto di fattori pratici. Questo capitolo è utilizzato per calcoli teorici al fine di fornire una guida teorica alla progettazione pratica. Le prestazioni e le specifiche del progetto sono strettamente correlate alle prestazioni dei componenti, alle condizioni d'uso, al layout, ecc., e richiedono test e verifiche rigorosi.
La progettazione di un'alimentazione buck sincrona per i controller di dominio Qualcomm è un ambito impegnativo della progettazione dei controller, che richiede un equilibrio tra prestazioni, dimensioni e costo. CODACA si concentra sulla ricerca e sviluppo indipendente e sulla progettazione di induttori di potenza e induttori comuni. Il modello CSEB0660-1R0M è adatto allo sviluppo e alle applicazioni basate sulla piattaforma Qualcomm, offrendo un elevato rapporto qualità-prezzo, una forte resistenza alla corrente di saturazione, una bassa generazione di calore e un rapporto potenza-volume leader nel settore. CODACA è impegnata nella ricerca, sviluppo e innovazione tecnologica, creando prodotti eccellenti per il settore degli induttori e contribuendo allo sviluppo e all'applicazione dei prodotti elettronici.