

הביקוש הגובר לאוטומציה בתעשיית הייצור והשירותים מדרבן את הפיתוח המהיר של רובוטים אנтрופואידים. עם העלייה במספר דרגות החופש (DOF) ושיפור מהירות התגובה לסביבה, הרובוטים האנטרופואידיים נעשו מתוחכמים יותר, מה שמאפשר להם לדמות תנועות אנושיות בצורה ריאליסטית יותר. דרגות חופש גבוהות יותר פירושן שהרובוטים האנטרופואידיים זקוקים ליותר נהגי מנוע, וסלילים ממלאים תפקיד חשוב במערכות בקרת המנוע, ניהול הכוח ועיבוד האותות של הרובוטים האנטרופואידיים.

1- השימוש העיקרי בסלילים ברובוטים אנטרופואידיים
סלילים משמשים בעיקר ברובוטים אנטרופואידיים לצורך ניוד מנוע, ניהול כוח ועיבוד אותות.
ניוד מנוע: רוב הרובוטים האנושיים מהמעלה הראשונה בשוק כוללים 40-50 מנועים קשיחים, שמציינים את חופש התנועה והגמישות של הרובוט. הסליל מונע את סיבוב המנוע בצורה חלקה באמצעות איחסון אנרגיה וזרם חלק, ועוזר למערכת בקרת המנוע של הרובוט האנושי להשיג תנועת צירים, התאמת שיעור ואיזון דינמי. נהלי הנעה ועומסי חשמל גבוהים דורשים סלילים עם מאפייני זרם רוויה גבוהים ויכולת העברת זרם גבוהה כדי להתמודד עם תנודות זרם רגעית. באותו זמן, יש צורך להפחית איבודים כדי לשפר את יעילות המערכת ולהאריך את חיי הסוללה.
ניהול אנרגיה: סלילים הם רכיבי ליבה של ממירים מסוג DC-DC (כדוגמה, מעגלי buck ו-boost) במערכות ניהול הספק, ומספקים אספקה יציבה של מתחים שונים למעבדי AI, חיישים, מודולי תקשורת ועוד, תוך אופטימיזציה של הפצה והמרה של אנרגיה. דרושים סלילים עם התנגדות ישרה נמוכה (DCR), יעילות המרה גבוהה כדי לצמצם איבדיי הספק, זרם סבירות גבוהה ויציבות טמפרטורית טובה.
עיבוד אות: במערכות עיבוד אותות, הסלילים משמשים בעיקר לדיכוי רעשים בתדר גבוה ו-EMI, ומבטיחים טוהר האות. למשל, במערכת ההשראה, זה עוזר להגשים את ההשראה והתגובה האינטראקטיבית של רובוטים דמויי אדם על הסביבה החיצונית. במערכות תקשורת ובקרה, הסלילים משתמשים בעיצוב EMI כדי להבטיח יכולת עמידה בהפרעות של מודולים כמו רדאר, מצלמה, תקשורת אלחוטית ועוד, ולשפר את היציבות التشغילת של הציוד.
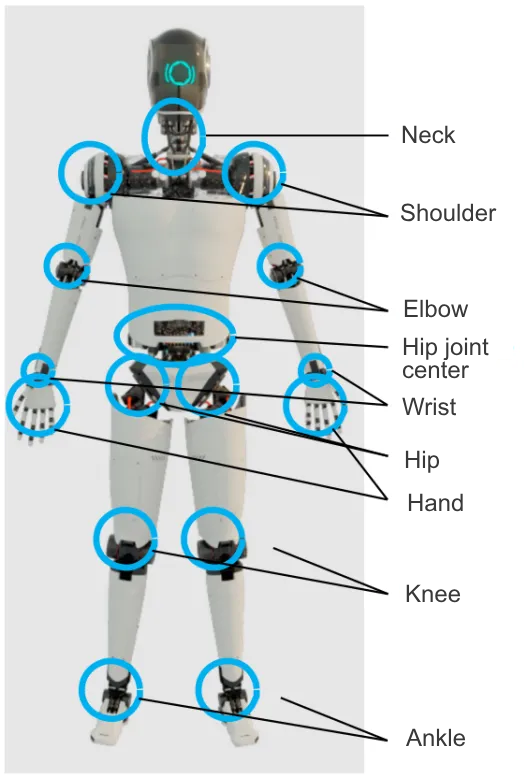
איור 1: המיקום המרכזי של מנוע המשותף של הרובוט האנושי (תמונה מ-TI)
2- הביקוש לסלילים עבור רובוטים אנושיים
המערכת האלקטרונית של רובוטים אנושיים היא מורכבת, ולשם ביצוע בקרת תנועה מדויקת ותקשורת אמינה, אין אפשרות להSepar מה תמיכה של רכיבים בסיסיים כגון סלילים. התכונות הטכנולוגיות של הרובוטים האנושיים קובעות גם הן את הדרישות הגבוהות לביצועים ולעיצוב המבני של מוצרים סליל. הדרישות הן בעיקר כדלקמן:
2.1 מיניאטיריזציה וה Zach של עוצמה גבוהה
החלל הפנימי של רובוטים דמויי אדם הוא צפוף ביותר, ומשלב מספר גדול של מנועים, יחידות חישוב (CPU/GPU), חיישנים וכו', והמעגל החשמלי לאספקת הכוח (כגון POL, ממיר נקודת עומס) חייב להיות ממוזער. הכרוכים חייבים להיות קטנים וקלים כדי להתאים לעיצובים מבניים קומפקטיים, אך גם להכיל צפיפות הספק גבוהה כדי להשיג טיפול בהספק גבוה בתוך שטח קטן. כריכלים עם מבנה מעוצב או משופע יכולים לעמוד בזרמי רוויה וזרמי עלית טמפרטורה גדולים מאוד בגודל פיזי קטן, מה שחיוני להשגת תפוקת הספק גבוהה במרחב מוגבל.
2.2 ביצועים חזקים נגד הפרעות אלקטרו-מגנטיות
הסביבה האלקטרו-מגנטית הפנימית של רובוטים היא מורכבת, עם מעגלים דיגיטליים מהירים, רעש חזק ממפסקים של נהגים של מנועים וחיישנים רגישים (כ예 למשל IMUs ומצלמות). שימוש בסלילים לא משוריינים ייצור שדה מגנטי חזק ויהפוך למקור של הפרעות אלקטרו-מגנטיות, מה שיפגע בצורה חמורה על יציבות קריאות החיישנים ועל מערכת הבקרה. הסליל המשוריין מאבד מינימום שדה מגנטי, מקטין ביעילות את ההפרעות האלקטרו-מגנטיות ומבטיח פעילות אמינה של רכיבים אחרים במערכת. לכן, סלילי מודל, סלילי הספק עם זרם גבוה וסלילי הספק אחרים עם מבנים משוריינים הם בחירות אידיאליות יותר.
2.3 זרם ספיחה גבוהה
ה tải הדינמית של הרובוט משתנה דרמטית, למשל כאשר הוא מתחיל לפתע, נע או מרבה עצמים כבושים, מה שיגרום לזרם של המנוע וליחידת החישוב לעלות באופן מיידי. המאוורור חייב להיות מסוגל להימנע מהשראה מוגברת בזרמים גבוהים (כלומר, ערך ההשראות לא יורד בצורה חדה), אחרת הלולאה של הכוח תצא משליטה, מה שיגרום למתח המערכת לקרוס ולהתחל. לכן, ההשראות צריכה להיות בעלת מאפיינים של "רוויה רכה", כלומר, כששואפים לזרם הרוויה, ערך ההשראות יורד לאט, ולא נופל בצורה חדה. זה מספק כUFFER למערכת בקרת הכוח ומשפר את אמינות המערכת.
2.4 ביצועים חזקים של עמידות לרעוע ולחבטות
רובוטים אנושיים נעים בתדירות גבוהה, מפיקים רטט מכני רב, ודורשים שמעגל הסליל יהיה עמיד בפני רטט ומעכות, שמחיברי הלحام יהיו איתנים, ושמעטה והסליל הפנימי יוכלו לעמוד בלחצי מכני. הסליל בעל המבנה המודלן מאחד לחלוטין את הסליל בתוך החומר המגנטי, מה שנותן עמידות מכנית גבוהה מאוד ועמידות מירסנית חזקה במיוחד, ולכן נעשה שימוש נרחב בו במערכות של רובוטים אנושיים.
2.5 התאמה לסביבות בתדר גבוה ובטמפרטורות גבוהות
הסליל צריך להיות בעל תכונות תדר גבוה טובות, המאפשרותав לחסום הפרעות בתדר גבוה, 줄 גליונות ורעש, ולשמור על איבדי אנרגיה נמוכים בתדר גבוה, כדי לשפר את יעילות ההמרה.
יתרה מכך, הסליל צריך לשמור על ערך אינדוקציה יציב בסביבה של טמפרטורה גבוהה, ירידה קטנה בערך Q, וביצועים שאינם דוגרים בקלות, כדי להבטיח שהביצוע של הסליל ברובוט אנושי יישאר אמין לאורך עבודה ממושכת.
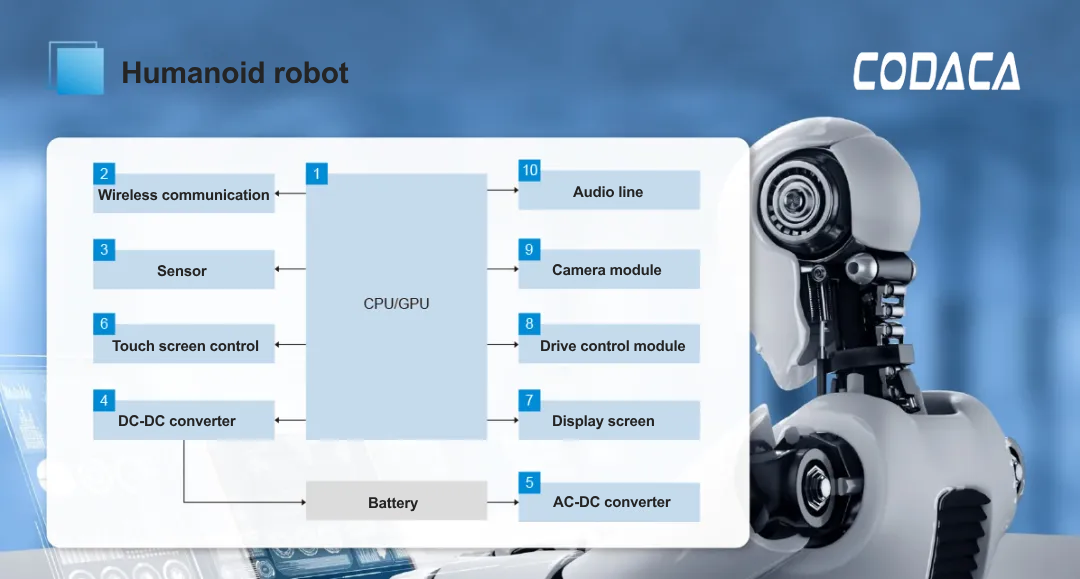
איור 2: יישום של סליל ברובוט אנושי
3- Codaca פתרון סליל עבור רובוטים אנושיים
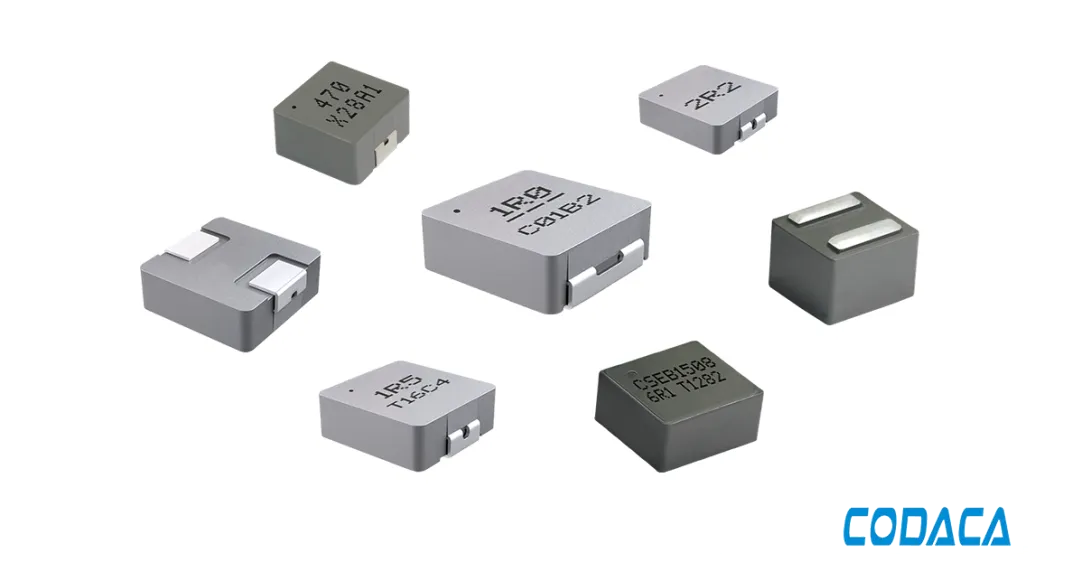
בApplications כגון רובוטים אנтрופואידים, המשלבים צפיפות הספק גבוהה, יעילות גבוהה, אמינות גבוהה, סביבות EMI מורכבות ותנאים מכניים קיצוניים, סליליות עם ליבה מחומר מתכת שזורזת זורם, מוגנות ושכמות זרם גבוה הפכו לבחירה העיקרית במעגלי הזנה, במיוחד בספקי כוח (POL) ליחידות עיבוד מרכזיים ולמניעת מנועי המפרקים, בזכות היתרונות הביצועיים הכוללים. העיצוב שלה מאוזן באופן מושלם בין שלושה אתגרים מרכזיים: ביצועים, גודל ואמינות.
באמצעות פיתוח עצמאי וחדשנות טכנולוגית, Codaca מספקת פתרונות סליל מתאימים לרובוטים דמויי-אדם, והחברה השיקה מספר קטגוריות ודגמים של מוצרים כגון שilded current inductors עם מבנה מגן מגנטי, סלילים מודלים דקים וקלים, וסלילי התנגדות משותפת. החברה יכולה לספק מאפיינים חשמליים שונים כדי לעמוד בדרישות הביצועים הגבוהות של סלילים בסצנריות שונות של רובוטים דמויי-אדם, ושימושים אלו נפוצים מאוד במודולי תקשורת וניווט של הרובוט, מודולי הספק, מודולי נהיגה של מנוע, לוחות בקרה של הרובוט ועוד.
3.1 סליל הספק קטן עם זרם גבוה
מנגנים קומפקטיים למעצר זרם גבוה משמשים בעיקר במודולי DC-DC במערכות הנעה ובקרה של רובוטים אנтрופומורפיים. הסליל בעל זרם גבוה מאמץ ליבת אבקה מגנטית מתכתית עם איבודים נמוכים שפותחה באופן עצמאי על ידי Codaca, אשר מאופיינת בזרם סätturation גבוה, איבודים נמוכים, יעילות המרה גבוהה וטמפרטורת עבודה גבוהה, כדי להבטיח את הביצועים והסיבולת של הרובוטים האנטרופומורפיים. זרם הסליל בעומס גבוה יכול להגיע עד 422A וטמפרטורת הפעולה יכולה להגיע עד 170° צלזיוס. באותו זמן, המוצר מאמץ מבנה שilded מגנטי, שיש לו ביצועים חזקים של עמידות בהפרעות אלקטרו-מגנטיות. הוא עומד במלואו בצרכים של רובוטים אנטרופומורפיים ביחס לזרם סätturation גבוה, טמפרטורת עבודה גבוהה והפרעות אלקטרו-מגנטיות נמוכות.
מודלים מומלצים: CSBX , CSBA , CSCM , CSUT , CSCIL , וכו'.

3.2 שיכתוב שנאים דקים וקלים
סלילי חציבה משמשים בעיקר במודולי תצוגה של רובוטים אנтрופומורפיים, מודולי בקרה של מסכי מגע, מודולי DC-DC וכו'. ספירות הכוח המוליכות משתמשות באבקת סגסוגת עם איבداع נמוך שפותחה באופן עצמאי על ידי CODACA, שהינה עם איבداع נמוך, יעילות גבוהה, תדר יישום רחב, ויודעת להפחית את הרעש לרמה חסרת תחרות. העיצוב עדין וקליל (בגודל מינימלי של 2 מ"מ), חוסך מקום ב-PCB, מתאים להרכבה צפופה, ובעל עמידות גבוהה ל sock מכני ורטט (עמידות בפני רטט של יותר מ-10G), וממלא את דרישות הרובוטים האנטרופומורפיים בנוגע לצפיפות הספק הגבוהה והיציבות הגבוהה.
מודלים מומלצים: CSAG , CSAC , CSAB , CSEB , CSHB , וכו'.
3.3 מוליך כוח SMD
מוליכי כוח Codaca SMD משמשים בעיקר במודולי מצלמה, מודולי שמע, מודולי DC-DC וכו', ומסוגלים לעמוד בצרכים של גודל קטן של מוליך, זרם גבוה, יעילות המרה גבוהה וכו'.
מודלים מומלצים: אס.פי.אר.אייץ.אס , CSU ס , CRHSM , VCRHS , SPQ , וכו'.

כספק מוביל בתחום טכנולוגיית רכיבים מגנטיים, Codaca Electronics מתמקדת בפיתוח סלילים במשך 24 שנים, והמהנדסים יכולים להתאים ערך השראות, זרם נומינלי, תדר פעימה, גודל המוצר וכו' לפי דרישות הביצועים הספציפיות של כל תת-מערכת של רובוט אנושי עבור סלילים. יש ליצור קשר עם צוות המכירות של Codaca לקבלת מידע מפורט יותר.