

داواکاری زۆر بەهێزبوونی ئۆتۆماتیک کردن لە سەنایەتی دروستکردن و پیشەسازی خزمەتگوزاری دا، پەرەسەندنی خێرا بۆ ڕوبۆتە نەفسییەکان هەستاوە. لەگەڵ زیادبوونی پلەکانی ئازادی (DOF) و باشتر بوونی خێرایی وەڵامدانەوە بۆ ژینگە، ڕوبۆتە نەفسییەکان زیاتر تەکنەلۆجیان بەدەست هێناوە، کە ئەمەش ڕێگە دەدات بۆ متمانەی زیاتر بە جوڵە نەفسییەکان. پلەی زۆرتری ئازادی مانای ئەوەیە کە ڕوبۆتە نەفسییەکان پێویستیان بە دروستکردنی مۆتۆری زیاتر هەیە، و ئیندەکتەرەکان ڕۆڵێکی گرنگیان هەیە لە کۆنتڕۆڵکردنی مۆتۆر، ڕاگەیاندنی کارا، و سیستەمی پرۆسێسکردنی سیگنال لە ڕوبۆتە نەفسییەکان.

١- سەرەکیترین بەکارهێنانی ئیندەکتەرەکان لە ڕوبۆتە نەفسییەکان
ئیندەکتەرەکان بە شێوەی سەرەکی لە ڕوبۆتە نەفسییەکان لە دروستکردنی مۆتۆر، ڕاگەیاندنی کارا، و پرۆسێسکردنی سیگنال بەکاردێن.
درۆستکردنی مۆتۆر: رۆبۆتە ئینسانی سطح بەرزەکان لە بازاڕدا بە ئاسایی ٤٠ تا ٥٠ مۆتۆری پێکهاتوویان هەیە، کە ئازادی و شێوازی ڕۆبۆتەکە دیاری دەکەن. ئیندەکتۆر مۆتۆرەکە بە ناوچەی کارا و کاراگەری هموار دەخەنە کار، کە یارمەتی سیستەمی کۆنتڕۆڵی مۆتۆری ڕۆبۆتی ئینسانی دەدات تا جووتەکان بجوڵێن، دۆخەکە ڕێک بخات و توڕەبوونی داینامیکی بەدەست بهێنێت. مۆتۆرەکان و بارە زۆربەهاشەکان پێویستیان بە ئیندەکتۆرەکانی هەیە کە تایبەتمەندی کارەبای تەواوبوونی بەرز و توانای هەڵگرتنی کارەبای بەرزیان هەیە بۆ داگیرکردنی گۆڕانکارییە لاشارەکانی کارەبا. لە هەمان کاتدا، پێویستە فراوانی کەم بکرێتەوە بۆ زیادکردنی کارایی سیستەم و ماوەی کارکردنی باتری.
ڕاژەکردنی هێز کۆمپۆنێنتە بنچینەییەکانی گۆڕەرەوەکانی فشاری کارا (لە نموونە دەرەوە و گردا سوود لە بەردەست بوونی دابەشکردن و کارایی گواستنەوەی کارا. پێویستی بە کەم بودنی ڕەوانی کارا (DCR)، کارایییەکی بەرز لە گواستنەوە بۆ کەمکردنەوەی لەدەستدانی کارا، شێوەی کارا بەرز و تەندروستی باشی سویچینەوەی گەرمی هەیە.
پرۆسێسکردنی سیگنال: لە سیستەمەکانی پرۆسەکردنی سیگناڵ، سەرەتا ئیندەکتۆرەکان بەکار دێن بۆ خامۆشکردنی نویزی فریکانسی بەرز و EMI، بۆ ئەوەی پاکی سیگناڵ بپارێزێت. بۆ نموونە، لە سیستەمی وشکاوتنیدا، یارمەتی دەدات بۆ دیاریکردن و پاساوەکانی ڕۆبۆتەکانی مرۆڤ نسبەت بە دەرهەوە. لە سیستەمەکانی کۆمۆنیکەیشن و کۆنتڕۆڵ، ئیندەکتۆرەکان بەکاری دێن لە دیزاینی EMI بۆ ئەوەی توانای پاراستن بۆ ماژولەکانی ڕادار، کامێرا، کۆمۆنیکەیشنی بێترسەکی و هتد بپارێزێت، و تەندروستی کارکردنی ئامێرەکان زیاد بکات.
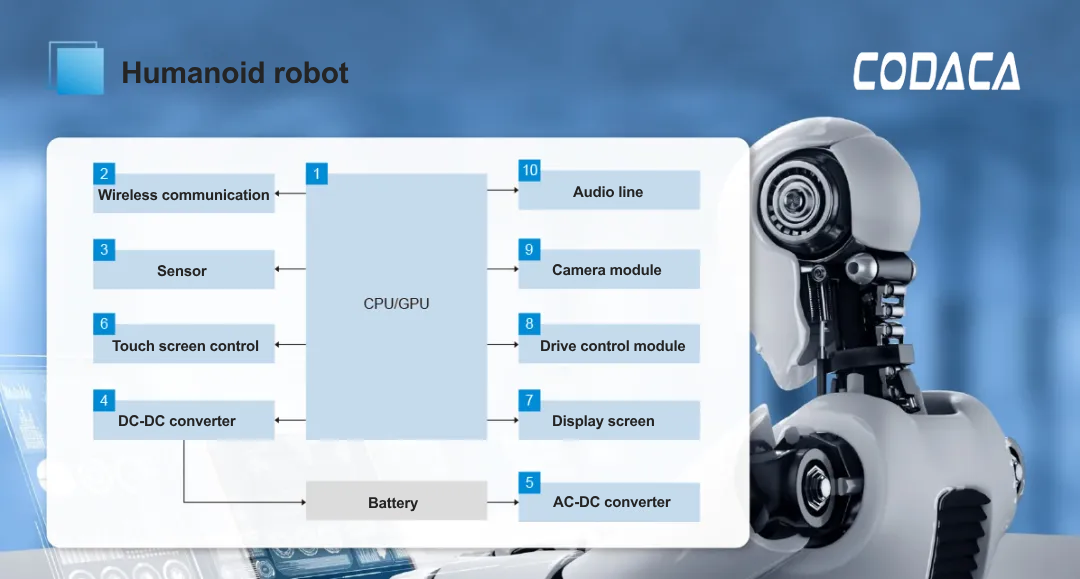
وێنەی ١: دۆخی سەرەکی مۆتۆری هاوتەشتنی ڕۆبۆتی مرۆی (وێنە لە TI)
٢- پێداویستی بە ئیندەکتۆرەکان بۆ ڕۆبۆتە مرۆییەکان
سیستەمی ئەلیکترۆنیکی ڕۆبۆتە مرۆییەکان نائاساییە، و بۆ دەستکەوتنی کۆنتڕۆڵی جوڵەی تەواو و پەیوەندی بەهێز، ناتوانرێت بەبێ پشتگیری کردنی بەشە بنچینەیییەکانی وەک ئیندەکتۆر بکرێت. تایبەتمەندی تەکنیکیی ڕۆبۆتە مرۆییەکان دیاری دەکات کە پێویستی زۆر بەردەوام بۆ کارایی و شیکردنەوەی ئامێری ئیندەکتۆر بێت. پێداویستییەکان بە شێوەی سەرەکی بریتین لە:
٢.١ بچووککردنەوە و چڕی هێزی بەرز
ناوەوەی ڕوبۆتە دامەزراوەکان بە شێوەیەکی زۆر کورتە، پێوستی بە کارگرتنی ژمارەیەکی زۆر لە مۆتۆر، یەکە ناسیاری (CPU/GPU)، سێنسۆر و هتد هەیە، و دەبێت پلەی سروشتی کارەبایی (وەک POL، گوهەری خاڵ-بۆ-بار) بچووک بکرێت. دەبێت ئیندەکتۆرەکان بچووک و ئاسوو ببن بۆ جواندن لە دیزاینە کورتەکان، لە کاتێکدا دەبێت چالاکی تەواوی بەرزیان هەبێت بۆ دەستکەوتنی چالاکی بەرز لە شوێنێکی بچووک. ئیندەکتۆرەکان لەسەر شێوەی فۆرم و یان پەردهدار دەتوانن بەهێزترین شێوازی سەرشاربوون و گەرمی هەڵگردن لە جیهەدی بچووکی فیزیکیدا دەربکەن، ئەمەش بەهێزە بۆ دەستکەوتنی چالاکی بەرز لە شوێنێکی سنوردار.
٢.٢ توانای باش لە بردەستکردنی کاریگەری کارەبایی-ئەلیکترۆمەغناطیسی
ژینگەی ئەلەکترۆمەغناطیسی ناوخۆی ڕۆبۆتەکان ئەندامە، پێکهاتی چرخەی دیجیتاڵی بەهێز، نویزی کاتبەری بەهێز لە ڕاودەرە مۆتۆرییەکان و سێنسۆرە حەساسەکان (وەک IMUs و کامێرا). بەکارهێنانی ئەندامەکانی بێ شاڕەباوی دەرئاسای مەغناطیسی بەهێز دابنێت و دەبێتە سەرچاوەی هەڵمەتی ئەلەکترۆمەغناطیسی، کە بەشێوەیەکی زۆر دەرئاسای پێوانە و سیستەمی کۆنتڕۆڵ دەبێت. ئەندامی شاڕەباوی کەمترین نوکەلی مەغناطیسی هەیە، بە شێوەیەکی کاریگەر کەم دەکاتەوە هەڵمەتی ئەلەکترۆمەغناطیسی و دڵنیادەربارەی کارکردنی بەردەستی کۆمپۆنەتەکانی تر لە سیستەم. بۆیە ئەندامەکانی فۆرمکراو، ئەندامەکانی هێزی بەهێزی بەرز و ئەندامەکانی تری هێزی لەگەڵ ساختی شاڕەباوی مەغناطیسی بەرەو ئەوچارەترین هەڵبژاردنەکانن.
2.3 هێزی ساتورن کارا
باری دینامیكی ڕۆبۆت بە شێوەیەکی زۆر دەگۆڕێت، وەك ئەگەر لە سەرەتادا بەهەستیار بچێت، بدوودا ببات یان باری قورس بباتە سەر، كرنتی مۆتۆر و یەكانە محاسیبەكان بە شێوەیەكی فوری دەزيێتەوه. هێڵە داخراوەكە پێویستە بتوانێت لە باری زۆر بەردەوامی بێت (واتە بەهاى ئیندوكتانس کەم نابێتەوه بە شێوەیەکی خێرا)، بەدەربارە ئەگەر نەبوو، سیکلی كارا دەربەدەر دەبێت، دەبێتە هۆی شکاندنی فشاری سیستەم و دووبارە کردنەوەی. بۆیە پێویستە ئیندوكتانس خاسیەتی "ناسازمانی نرم"ی هەبێت، ئەوەش ئەو کاتەی کە نزیک دەبێتەوە سەر کارەبای ناسازمان، بەهاى ئیندوكتانس بە ئاڕاستەیەکی نزم داواز دەکات، نەک وەك فرەخوارتن. ئەمە بوفرێک دابین دەکات بۆ سیستەمی کۆنتڕۆڵی کارا و ڕاستەوخۆیی سیستەم دەبەخشێت.
٢.٤ توانای بەرزی بەربەستن بە تەلازلاندن و ئاگرکردن
ڕوبۆتە کەسییەکان زۆر جار بچوولێن، تێکشکاندنی میکانیکی زۆر دەبینن، و شێلەکە پێویستی بە شێلەی سەقامگیر و بەهێز بوون بۆ توانای تێکشکاندن و لەناوبردنی هەڵمەتەکانی میکانیکی هەیە. پێویستە پەیوەندییەکانی لە ناو بەرهەمەکە بە بەهێزی بچاسێندرێن و پۆلە و پێچەکانی ناخەوە دەتوانن سەقامگیری بە تەنهاوە ببن. شێلەکانی ساختەی فرمکراو بە تەواوەتی پێچەکانی ناخ شێلەکە دادەنیشێنن و لە ناو ماددەی مەغناطیسیدا داواژن، کە بەهێزی میکانیکی زۆر بەرزی هەیە و توانای زۆر بەهێزی لە بەربەستن بە تەلەعات و شۆڕشەکانی هەیە، بۆیە زۆر بەکاردێت لە سیستەمی ڕوبۆتی کەسییەکاندا.
٢.٥ گونجاندن بۆ ئاستی بەرزی فریکانس و گەرمی
پێویستە شێلەکە تایبەتمەندی باشی فریکانسی بەرزی هەبێت، کە دەتوانێت بە شێوەیەکی کاریگەر شۆڕشی فریکانسی بەرز بخاتە بەر، هەڵمەت و کێشی کەم بکاتەوە، و لە فریکانسی بەرزدا خەرجی کەمی هەیبدارد بۆ ئەنجامدانی کارامەتری بۆرینەوە.
لەگەڵ ئیش، شیلکار دەبێت توانای هەبێت لە پاراستنی بەهای هەرەمەندی لە جۆرە گەرمەکان، بەهای Q کەم دەبێت، و کارایی بەهێز دەکەوێت، بۆ ئی ئەوە بپارێزێت کە کارایی شیلکان لە ڕۆبۆت بۆ کارکردنی درێژخاین بەهێز بێت.
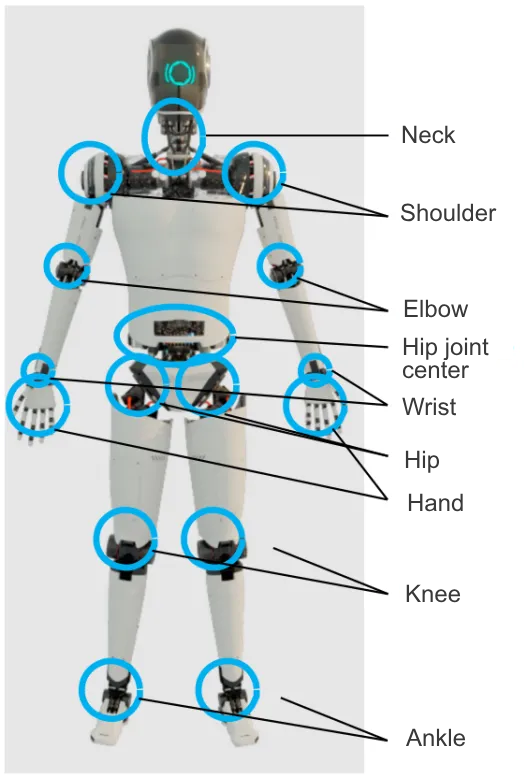
وێنەی 2 بەکارهێنانی شیلکار لە ڕۆبۆتی مرۆڤی شێوە
3- Codaca چارەسەری شیلکار بۆ ڕۆبۆتی مرۆڤی شێوە
لە بەکارهێنانەکان کە وەک ڕۆبۆتی مرۆڤی شێوە دەبێتە یەکگەر، کە تەڕی هێزی بەرز، کارایی بەرز، بەهێزی بەرز، جۆری پیچکی EMI و بەرگری مەکانیکی قورس دەبێتە یەکگەر، شیلکاری بەرزی کارەبایی، بەپاراستوو، لەگەڵ هەڵچووی ئەلیاۆی بەکارهێنراو دەبێتە هەڵبژاردی سەرەکی بێجگە لە گەریداکانی کارەبایی، بەتایبەتی لە گەریداکانی POL بۆ یەکەیەکانی کارەبایی و دەرەکانی ژینگەی جووت. توڕەیەکی دیزاین بە تەواوی هەموو سێ چالاکی سەرەکییەکانی کارایی، قەبارە و بەهێزی دادەن.
لەڕێی توێژینەوەی سەربەخۆ و نوێکاری تەکنەلۆژی، كۆداتسە چارەسەری سازکراوی ئینداكتۆر بۆ ڕۆبۆتی مرۆڤ شێوە دابین دەكات، و کۆمپانیاکە چەندین جۆر و مۆدێلی بەرهەم بڵاو کردووەتەوە وەک ئینداكتۆری هێزی ههرزی بەرزی ساختەی مافناوی مافن، ئینداكتۆری لێور و شێوەکراو، و داخستنەوەی ڕێژەی یەکسان. دەتوانێت تایبەتمەندییە کهرشییە جیاوازەكان دابین بکات بۆ پێداویستییە بەرگری باڵا ئینداكتۆر لە دۆخی جیاوازی ڕۆبۆتی مرۆڤ-شێوە، و بە شێوەی گەورە بەکاردێت لە ماژولی کۆمۆنیکەیشن و ناوبریگەیشنی ڕۆبۆت، ماژولی هێز، ماژولی چاودێری مۆتۆر، بۆری کۆنتڕۆڵی ڕۆبۆت و ماژولەکانی تر.
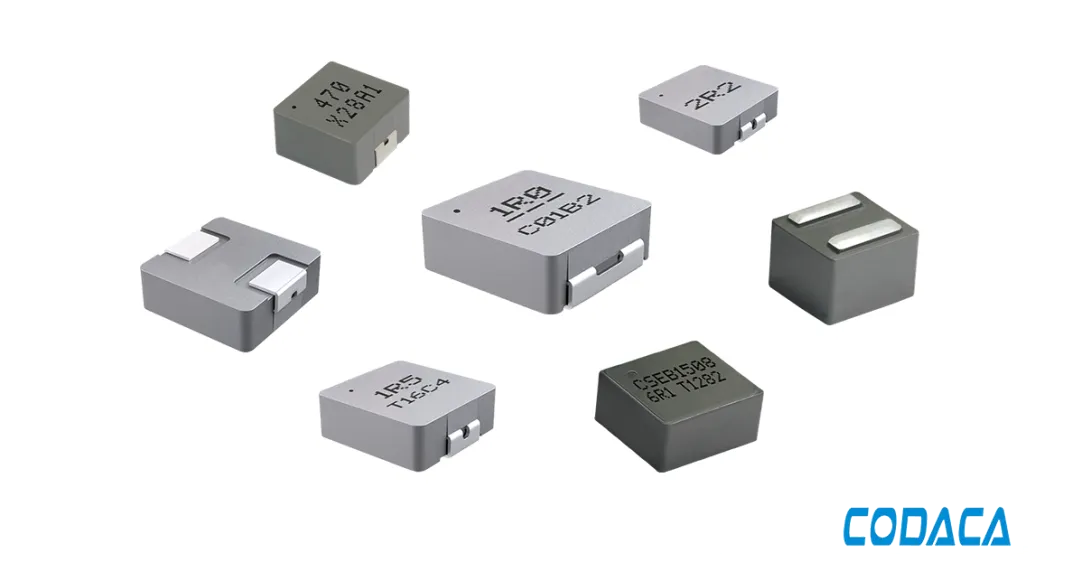
٣.١ ئینداكتۆری هێزی ههرزی بەرزی کومباکت
Inductorên hêzê bilind yên kompak زۆرتر بەکار دێت لە مۆدیولەکانی DC-DC لە سیستەمی هەڵکشان و بەرهەمهێنانی کارەبایی پیاوی مرۆڤ. ئیندەکتۆری کارەبایی بەرز کۆری توخەی ماددەی مەگنەتیکی فلزی بە کەمترین لە دوورچوونەوە بەکار دێت کە لەلایەن Codacaەوە بە شێوەیەکی بەتاڵ گەشەپێدراوە، کە تایبەتمەندی کارەبایی بەرز، لە دوورچوونی کەم، کارایی بەرزی گواستنەوە، و بەرزترین پلەی گەرمی کاردانەوەی بەرزی هەیە بۆ ئەوەی سەلامەتی و بەردەوامی پیاوی مرۆڤ بپارێزێت. کارەبایی ئیندەکتۆری کارەبایی بەرز دەگاتە 422A و پلەی گەرمی کاردانەوە دەگاتە 170°C. لە هەمان کاتدا، بەرهەمەکە ساختەی مەگنەتی بەکاردێت، کە توانای باشی لە بەربەستنی ناڕەحەتیی کارەبایی و مەگنەتی هەیە. پێویستی پیاوی مرۆڤ بۆ کارەبایی بەرز، پلەی گەرمی کاردانەوەی بەرز و ناڕەحەتیی کارەبایی و مەگنەتی کەم بە تەواوی داخڵ دەکات.
موودەلە پێشنیارکراوەکان: CSBX , CSBA , CSCM , CSUT , CSCIL , dst.

3.2 ئیندەکتۆرە شێلفراوە توند و ئاڵاو
ئیندۆکتۆرەکانی موولدکراو زۆربەی جاران بەکار دێن لە ماژولە نیشاندەرەکانی ڕۆبۆتی مرۆڤ، ماژولە کۆنتڕۆڵی شاشەی تەسمە، ماژولەکانی DC-DC و هتد. سەندووقەکانی هێزی فۆرمکراو توخومی ئالیاژی کەم خەرجی خۆپێشەوە توخوم کراوە بەکار دێن کە CODACA بە شێوەیەکی بەتاڵ گەشەی پێداوە، کە خەرجی کەم، کارایی بەرز، فریکانسی بەکارهێنانی گشتی هەیە و دەتوانێت نووسە بۆ ئاستێکی نزمتر کەم بکاتەوە. دیزاینێکی نازنین و ئاسوودە (بچووکترین قەبارەی 2 مم) بەکار دێن، شوێنی PCB دابەزێن، گونجاوە بۆ بەستنەوەی چڕی بەرز، توانای بەرزی لە بەرامبەر شۆک و لەرزاندنی میکانیکی (قاویلی لەبردنەوەی لەرزاندن زیاتر لە 10G)، پێداویستی ڕۆبۆتی مرۆڤ بۆ چڕی هێزی بەرز و ناوبانگی بەرز دابین دەکات.
موودەلە پێشنیارکراوەکان: CSAG , CSAC , CSAB , CSEB , CSHB , dst.
3.3 سایندووری ئیندۆکتۆری هێز
ئیندۆکتۆرەکانی هێزی سایندووری کۆداسا زۆربەی جاران بەکار دێن لە ماژولەکانی کامێرا، ماژولە دەنگییەکان، ماژولەکانی DC-DC و هتد، کە دەتوانێت پێداویستی قەبارەی بچووکی ئیندۆکتۆر، کارەبایەکی گەورە، کارایی بەرزی گواستنەوە و هتد دابین بکات.
موودەلە پێشنیارکراوەکان: SPRHS , CSUS , CRHSM , VCRHS , SPQ , dst.

وەکو سەرچاوەی پێشڕەو دروشتی تەکنۆلۆژیای کۆمپۆنێنتی مەغناطیسی، کۆداکا ئەلیکترۆنیک ٢٤ ساڵە تەماشای گەشەپێدانی ئیندەکتەر کردووە، و ئەنجینیەران دەتوانن بەپێی پێداویستییە کارایییەکانی هەر زانکۆیەکی ڕۆبۆتی مرۆڤ شێوازەکانی ئیندەکتانس، کارەبای ڕەسمی، فریکانسی گۆڕانکاری، جیاتی بەرهەم و نموونە بچوک بکەنەوە. بۆ زانیاری زیاتر پەیوەندی بە کۆماری فرۆشتنی کۆداکا بکەن.