
Links Celeres

Aucta necessitas automationis in industriis manufacturariis et operarum celerem evolutionem humanoidum ducit. Cum incremento graduum libertatis (DOF) et melioratione velocitatis responsi ad ambientem, robots humanoides subtiliores facti sunt, ut motus humanos realius imitari possint. Gradus libertatis altiores significant robots humanoides plures necessitare impulsores motores, et inductores munus magnum agunt in systematibus gubernationis motorum, gestionis potentiae et elaborationis signorum.

1- Applicatio principalis inductorum in robotis humanoidibus
Inductores praecipue in robotis humanoidibus in impulsione motorum, gestionis potentiae et elaborationis signorum utuntur.
Impulsio motoris: Robota humanae formae summae in foro mercato saepe 40-50 motus articulatos habent, qui libertatem et flexibilitatem roboti determinant. Inductor motorem per accumulationem energiae et currentem aequabilem leviter rotare cogit, adiuvans systema de motu roboti humanae formae ad movendum articulationes, corrigendum statum et aequilibrum dynamicum consequendum. Agitatores motorum et onera altae potentiae inductores requirent cum proprietatibus altioris currentis saturativae et capacitate portandi currentem altiorem, ut fluctuationes currentis instar superare possint. Simul, necessarium est damna minuere, ut efficacia systematis et vita batteriae augeri possint.
Gestio Potestatis Inductores sunt componentia prima converterum DC-DC (ut circuitus buck et boost) in systematibus gestionis electricitatis, quae constantem subministrationem electricitatis ad varias tensiones praebent pro processorum AI, sensoribus, modulis communicationis, etc., energiae distributionem et conversionis efficientiam optimizantes. Exiguntur resistentia directa currentis (DCR) parva, efficiens conversio alta ad minuendam disipationem electricitatis, saturatio currentis alta et stabilis temperatus qualis.
Signum processus: In systematibus tractationis signali, inductores primarius ad supprimendum rumorem alti frequentis et EMI utuntur, signalem puritatem servant. Exempli gratia, in systemate perceptionis, adiuvat ad perceptionem et responsionem interactivam robotum humaniformium in ambientem externum perficiendam. In systematibus communicationis et regendi, inductores per conceptionem EMI utuntur ut facultas adsistendi radaribus, cameris, communicationibus wireless aliisque modulis servetur, atque stabilitas operationis instrumentorum melioratur.
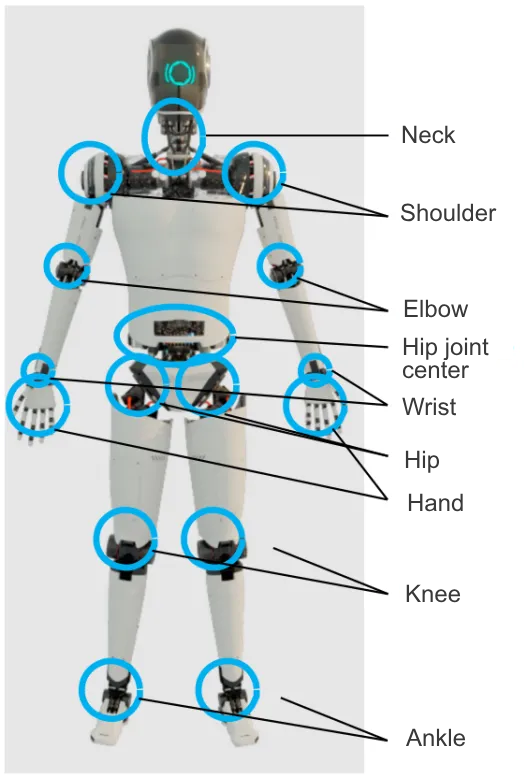
Figura 1: Locus principalis motoris artuum roboti humani (imago e TI)
2 - Postulatum de inductoribus pro robotis humanis
Systema electronicum robotorum humanorum complexum est, et ad motus praecisos regendos atque communicationem firmam consequendam, absque subsidio componentium fundamentalium sicut inductores esse non potest. Characteres technici robotorum humanorum etiam altas conditiones ad exigentiam inductorum quoad vim et structuram determinant. Hae conditiones praecipue sunt:
2.1 Minutatio et alta densitas potentiae
Spatium internum robotorum humanoidum extremum est compactum, multa motores, unitates computandi (CPUs/GPUs), sensors, et alia integrans, et tabula circuitus alimentationis (sicut POL, converteris ad punctum-onera) miniatum debet esse. Inductores parvi et leves requiruntur ad structuras compactas idonas, etiam habentes altam densitatem virtutis ad altam virtutem in parvo spatio tractandam. Inductores cum constructione formatis vel tectis valde magnas currentes saturandi et currentes elevationis thermicae in parva magnitudine physica ferre possunt, quod ad altam virtutem efficiendam in spatio limitato necessarium est.
2.2 Fortis praestantia adversus interference electromagneticam
Internum ambientes electromagneticum robotarum complexum est, cum circuitibus digitalibus altius velocitatis, fortis strepitu commutationis e ductoribus motorum, et sensoribus sensitivis (ut sunt IMUs et camerae). Usus inductorum non munitos generabit campum magneticum fortem et fiet fons interference electromagneticae, quod graviter afficiet stabilitatem lectionum sensorum et systematis regolandi. Inductor munitus minimam magneticam effusionem habet, efficaciter interferencem electromagneticam minuens et operationem reliquorum componentium in systemate firmandem. Itaque indutores formati, indutores potentiae altioris currentis, aliiq; indutores potentiae cum structuris munitis magneticis magis ideales electiones sunt.
2.3 Alta correntis saturatio
Onus dynamicum roboti permutatur valde, ut fit subito incipiens, currentibus aut gravia levans, tum repente motoris et unitatis computantis currentes erumpunt. Inductor debet saturazione magnetica in altis currentibus effugere (id est, valor inductivitatis non cito cadit), alioquin circuitus potentiae impetu exorbitabit, systematis tensionem labefactando et rursus initiando. Itaque inductivitas habere debet proprietatem "saturationis mollis", hoc est, quando ad saturationis currentem acceditur, valor inductivitatis lente decrescit, non ut praeruptum decidens. Hoc buffer praebetur systemati regulationis potentiae et fiducia systematis augetur.
2.4 Fortis resistentia vibrationi et ictui
Robota humanae figurae saepe moventur, multam vibrationem mechanicam habent, et inductor firmam vibrationis et ictus resistentiam habere debet; iuncturae soldatiles eius firmas esse debent, et cortex ac spira interna vim mechanicam sustinere possunt. Inductor structurae formatae spiram intra materiale magneticum penitus solidificat, quod vim mechanicam valde magnam habet et validissime a ictu resistit, ideoque late in systematis roboticis humanae figurae utitur.
2.5 Adaptatio ad alta frequentia et calida ambientes
Inductor bonas qualitates altioris frequentiae habere debet, quae perturbationes altioris frequentiae efficaciter supprimere possunt, ondulationem et strepitum minuere possunt, et ad altiores frequentias bassam disipationem energiae servare possunt, ut efficiencia conversionis meliorari possit.
Praeterea, inductor debet valorem inductivitatis in ambiente altae temperaturae stabiliter retinere, ita ut valor Q parum minuatur et praestantia non facile deteriorescere possit, ut performance inductivitatis roboti in opere diuturno fida maneat.
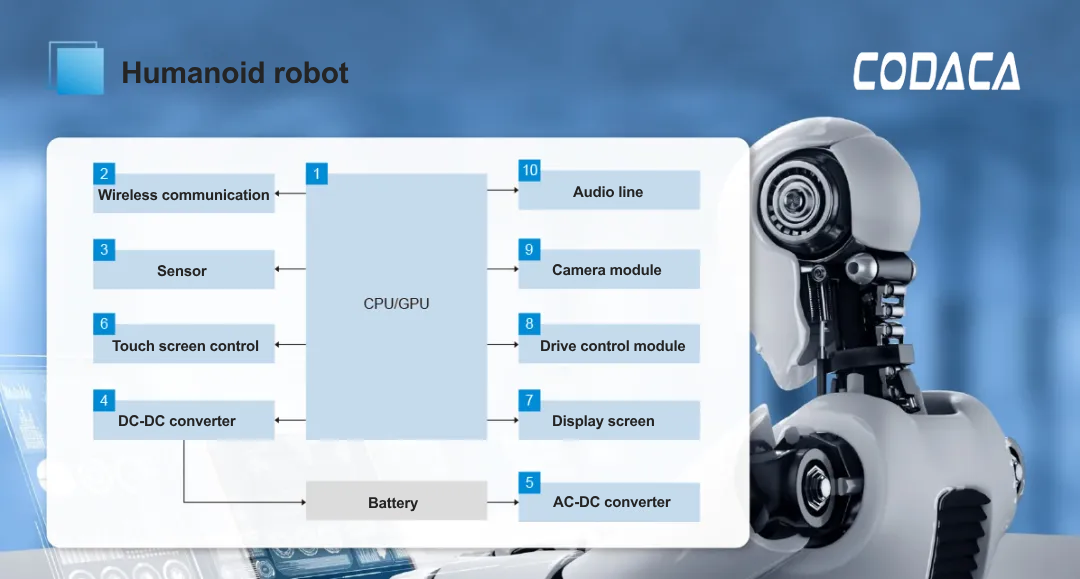
Fig. 2 Usus inductoris in roboto humanae figurae
3- Codaca solutio inductoris pro robotis humanae figurae
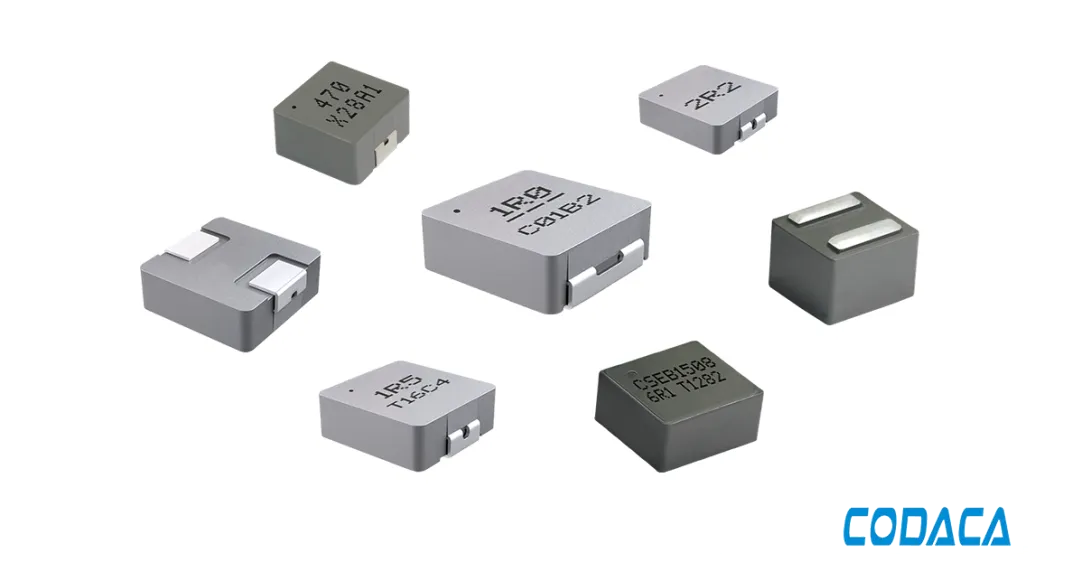
In applicationibus, quae potestatem densam, altam efficaciam, altam fidem, complexa EMI ambientes et asperas conditiones mechanicorum coniungunt, sicut roboti humanae figurae, inductores alti currentis, muniti, cum nucleo ex pulvere metallici sunt electio principalis in circuitibus alimentorum, praesertim in fontibus POL pro unitatibus computandi centralibus et motribus iuncturarum, propter praestantias suas comprehensivas. Eius descriptio optime aequilibrat tria praecipua onera: praestantiam, magnitudinem et fidem.
Per studium proprium et innovationem technologicam, Codaca solutiones inductoriae adaptivas pra robota hominiformia praebet, et iam producta varia genere et modelis, ut inductores potentes magnalium currentis alti structura scutata, inductores formati tenuis leves, et chokes communi modi. Variis characteristicis electricis praestat, ut requisita praebet de inductilibus alti praestantia in variis scenariis robota hominiformis, et late in modulis communicationis et navigationis robotorum, modulis potentiae, modulis motus ductus, tabulis de controla robotorum, et aliis modulis utitur.
3.1 Compactus inductor potens magnus currentis
Compacta altae currentis potentiae inductores praecipue in modulis DC-DC in robore motorum humanoidum et systematibus gestionis electricitatis utuntur. Inductor alti currentis materiam nucleorum magneticae pulvereae metallicae infractae a Codaca indevelopitam adhibet, quae proprietates habet alti currentis saturativi, fracturae parvae, alti rendimenti conversionis, et alti temperaturae operandi, ut praestantiam et perdurationem robotarum humanoidum tueatur. Inductor alti currentis usque ad 422A attingere potest et temperatura operandi usque ad 170°C elevari potest. Simul productum structuram magneticam velatam adotptat, quae validam resistentiam contra interferencem electromagneticam habet. Ita omnino necessitudines robotarum humanoidum in altum currentem saturativum, altam temperaturam operandi et parvam interferencem electromagneticam implet.
Modela Commendata: CSBX , CSBA , CSCM , CSUT , CSCIL , etc.

3.2 Inductores formati tenui et leves
Inductores formatorum praecipue in modulis monstratorum robotorum humanoidum, modulis controlis touchscreen, modulis DC-DC, etc. utuntur. Suffultiones potentiales formatae pulverem legi sui ipsius a CODACA evolutum suscipiunt, quod parvam habet amissionem, altam efficientiam, latam frequentiam applicationis, et noise ad valde bassam reducere potest. Design thin et leve adoptat (minima magnitudo 2mm), spatium PCB conservat, aptum est ad montagium altitudinis densitatis, et vim magnam adversus ictum mechanicum et vibrationem habet (resistentia vibrationis plus 10G est), necessitudines robotorum humanoidum ad altam densitatem potentiae et altam stabilitatem satisfaciens.
Modela Commendata: CSAG , CSAC , CSAB , CSEB , CSHB , etc.
3.3 SMD inductor potentiae
Codaca SMD inductores potentiae praecipue in modulis camerae, modulis auditus, modulis DC-DC, etc. utuntur, quae necessitudines ad parvam magnitudinem inductoris, magnam currentem, altam conversionis efficientiam, etc. implere possunt.
Modela Commendata: SPRHS , CSUS , CRHSM , VCRHS , SPQ , etc.

Ut princeps suppeditores in arte technologia componentis magnetici, Codaca Electronics insistent in evolutione inductivitate per annos 24, et ingenieri possunt aptam inductivitatis quantitatem, currentem nominatam, frequentiam commutationis, magnitudinem producti, etc. pro inductoribus, secundum praecipuas praestantionis petitiones uniuscuiusque subsystenis roboti humanoidis, aptare. Rogo ut contactus cum Officiariis Vendidoriis Codaca fiat pro informationibus minuti maiore.