
LINKS CITO

Quod ramus industrialis roboticae, robots collaborativi globatim recentibus annis celeriter adsumti sunt. Multis praestantibus ut flexibilitate alta, tutela meliore et amicitia ad usorem, late in adoptione in agris ut automotivis, medicinalibus et fabricandis – emergunt ut motor clavis automationis industrialis et developmentis intelligentis.

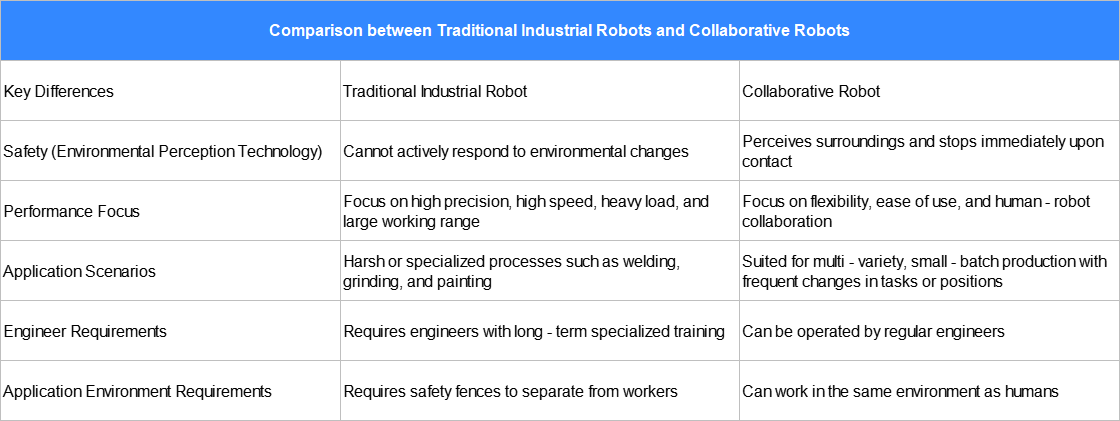
1. Quid est Robot Collaborativus?
Praecipua innovatio robotarum est una ex principali novae revolutionis industrialis proprietatibus. Tamen, humana participatio adhuc irreplacebilis manet in quibusdam dominis productorum et lineis productionis. Exempli gratia, in componentibus praeceptorum coniungendis vel negotiis laboriosis altam flexibilitatem poscentibus, roboti collaborativi cum operarioribus laborant, ut efficaciam roboticam et intelligentiam humanam maxime utantur. Ratione praeteritorum robotorum industrialium, meliora sunt pretii et commodi ratione, tutelae augmentatae, et maioris expeditionis, quae valde progressum manufacturarum promunt.
Praecipua Robotorum Collaborativorum Peculiaritas:
◾ Levis: Controllabilitatem et tutelam auget.
◾ User-Friendly Design: Superficies et articulos leves habet, nec acutos nec hiatus, qui operarios laedere possint.
◾ Perceptio Ambientis: Circumferentiam sentire et actiones secundum mutationes ambientales adaptare potest.
◾ Collaboratio Homini-Roboti: Munite feedback sensu tactili; statim desinit cum praescripta quantitate vires attingitur, ut cooperationem tutam inter hominem et robotam permittat—etiam absque barriera tuta in quibusdam casibus.
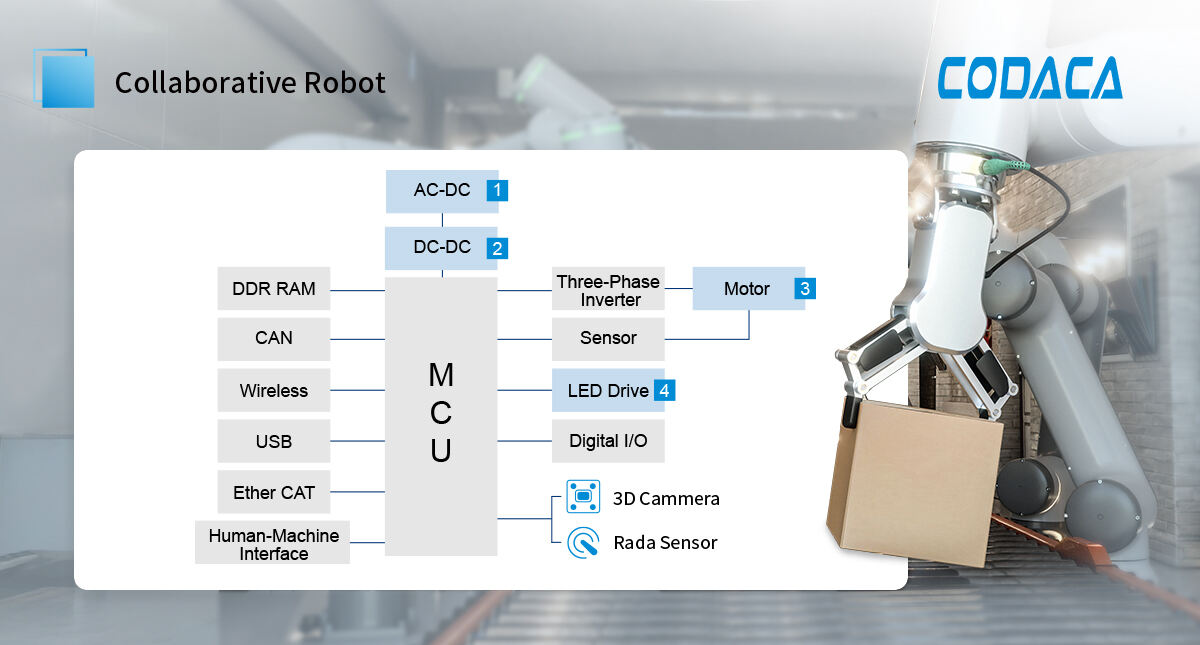
2. Tendunt in Systematibus Alimentationis ad Motus Roboticos Cooperativos
Robota complura elementa funktionalia includunt—ut connexio, perceptio visus, sensus loci, et regula motus—propter applicationes et functiones suas. Praeterea, variis subsystenmatibus electricis utuntur, inter quae conversio AC-DC, ratio bateriarum, conversio DC-DC, converticla multiplex, sensoria, et ductores motus. E quibus systema ductoris motus est nucleus robotarum collaborativarum, quod praecipue motum articulatum et alimentum regit.
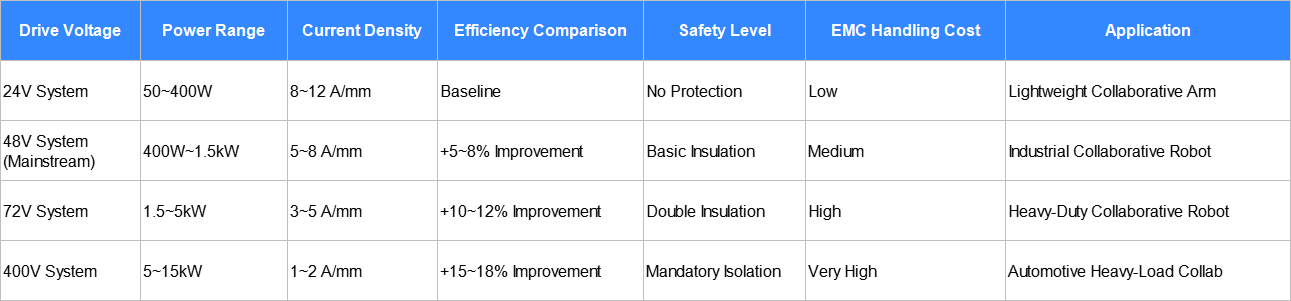
Systemata traditionalia motorum iam diu soluta 12V confidunt. Incrementum systematum 48V oritur ex 48V esse maximam communiter recognitam voltionem tutam. Comparata cum instrumentis quae per se e rete electrico funktur, ingeniores machinae designa protectionis systematis simplificare, productumque minuere, ita ut pondus, costa et damnum electricitatis diminuantur. Minores sunt motones directe a 48V acti, ad compendiosiorem et leviusculam articulationem ferendam, efficaciam energeticam, agilitatem et fidem augendo dum pondus et costae minuuntur. Hoc novas applicationes roboticis aperit et automationem industrialem accelerat.
3. Electromagnes Cernendus pro Systematibus 48V Motorum Alimentationis
Inductōrēs sunt componentes clāvī in sȳstēmatibus potestātis motoris 48V, praecipuē utīlizātī in cōnversōribus CC-CC (e.g., Circuītus Buck, Boost, et Buck-Boost). Eōrum functicōnēs clāviae includunt servātiōnem energiae, filtrātiōnem, suppressionem interferences, et stabilitātem sȳstēmatis. Electiō inductōrum cum minimīs pēditīs, altā saturatiōne currentis, et altīs currentibus significantēr efficientiām et stabilitātem sȳstēmatis meliōrat. Praetereā, inductōrēs praebent firmam suppressionem EMI, minuentēs interference noise commūtantis CC-CC in aliīs dēbīlibus circuītibus.
In systematis 48V motoris impulsi, actus inductoris stabilitatem, efficientiam et fiabilitatem systematis directe afficit. Ita, electio recti inductoris praecipua est ad ingeniarios hardware. Parametri principales caute aequilibrari debent, inter quos numerantur valor inductantiae, saturatio currentis, resistentia DC, et frequentia operationis.
Principales Inductoris Selectionis Parametri:
◾ Inductantia: Determinat magnitudinem currentis riplae et capacitatem conservationis energiae. Rerecti valores inductantiae riplam currentis leniunt et stabilitatem systematis augent.
◾ Saturatio Currentis: Est DC currentis qua saturatur nucleus magneticus. Materiae cum altis punctis saturationis et optima stabilitate thermica seligendae sunt ad operationem stabilem.
◾ Resistentia DC (DCR): Minus DCR minuit dispendium impetuosum et efficientiam meliorat. Structurae monolithicae fili plani inter se baiulant minorem DCR cum alta densitate impetuosae.
◾ Frequentia Operativa: SiC et GaN adoptati sunt, frequentiae commutationis ad intervallo MHz ascenderunt. Inductores potentiales frequents, compacti, et alt-currentis necessarii sunt ad operationem efficientem et stabilem systematis.
4. Codaca Solutiones Inductoris
Per studia et innovationem technologicam independentia, CODACA omnem copiam solutionum inductoris pro systematis 48V motoris electricis in robotis collaborativis offert, progressionem automationis industrialis adiuvans. Categoriae productorum variae et modeli afferuntur, quorum singulae proprietates electricae peculiares sunt ad necessitatem systematum alti perficientis.
4.1 Inductores potentiae magnae currentis
Nucleos pulveris magnetici cum spiris fili plani utere, qui proprietates habent currentis saturations alti, minimae amissionis, alti efficacitatis conversionis, et late intervallo temperaturae operantis. Idonei pro converteribus 48V DC-DC ubi currentis alta, amissio parva, et densitas potestatis alta requiritur.

4.2 Chocorum potentiae formatorum
Ex materiis nuclearis ad minimas resistentias producta, cum structura tota munita, praebet validam immunitatem contra perturbationes electromagneticas, minorem resistentiam directam, altiorem capacitatem currentis, et minorem dispendium nuclearis. Satisfacit requisitis systematis de magnitudine exigua, validiore currente, et firma praesentia contra perturbationes electromagneticas.
Incorporant nuclei magnetici ad altas frequentias et minimas dispendias, qua ex causa dispendia in altis frequentiis vix percipiuntur. Magnitudo eorum convenit ad locanda compagem densa, et designatio munitionis magneticis validam praesentiam praebet contra perturbationes electromagneticas, id quod eos praestantissimos reddit ad systemata compagem exigua et validissima.

Cum robotae cooperativi per industrias dilatentur, effectus et fiducia eorum 48V systematum motorum electricorum semper magis criticae fiunt. Electio diligens inductorum — considerando inductantiam, cursum saturationis, resistentiam directam, et frequentiam operationis — operationem stabilem, efficientem, et alti valoris confirmat. Solutionibus innovativis a sponsoribus ut CODACA praestitis, robotae cooperativi altiorem efficientiam energiae, praecisionem, et fiduciam adipisci possunt, secundam industriam automationem et fabricandorum intelligentiam promoventes.