
Хурдан холбоосууд

Үйлдвэрлэл, үйлчилгээний салбарт автомжуулалтын эрэлт нэмэгдэж байгаа нь хүн хэлбэр роботуудын хурдан хөгжилтийг дэмжих нөлөө болож байна. Хөдөлгөөний зэргийн чөлөө (DOF) нэмэгдэж, орчны хариу урвалын хурд сайжирч байгаа нь хүн хэлбэр роботуудыг илүү нарийвчлалтай болгож, хүний хөдөлгөөнийг илүү бодитой дүрсэлж имитацилах боломжийг бүрдүүлж байна. Зэргийн чөлөө өндөр байх нь хүн хэлбэр роботуудад илүү их тооны моторын хөдөлгүүр шаардагдахыг хэлэх бөгөөд индукторууд нь хүн хэлбэр роботуудын моторын хянал, цахилгаан хангамж, дохио боловсруулах системд чухал үүрэг гүйцэтгэдэг.

1- Хүн хэлбэр роботуудад индукторын үндсэн хэрэглээ
Индукторууд нь гол төлөв хүн хэлбэр роботуудад моторын хөдөлгүүр, цахилгаан хангамж, дохио боловсруулах зэрэгт ашиглагддаг.
Моторын хөдөлгүүр: Зах зэргийн хүнрүү төрлийн роботууд нь ихэвчлэн 40-50 ширхэг холбоотой моторуудтай бөгөөд эдгээр нь роботын чөлөөтэй хөдөлгөөн, уян хатан чанарыг тодорхойлдог. Индуктор нь энерги хадгалах, гүйдлийг тэгш болгох замаар моторыг эргэлтэд оруулах бөгөөд хүнрүү төрлийн роботын моторын хяналтын системд холбоосын хөдөлгөөн, байрлалын зохицуулга, динамик тэнцвэрийг хангамжлахад тусалдаг. Моторын хөдөлгүүр болон өндөр чадал ачаалал нь агшин зуурын гүйдлийн хэлбэлзэлд тэсвэртэй, ханасан гүйдлийн өндөр шинж чанартай, өндөр гүйдэл даах чадалтай индукторуудыг шаарддаг. Зэрэгцээ, системийн үр дүнтэй ажиллагааг сайжруулах, цахилгаан батарейн амьдралыг уртасгахын тулд алдагдлыг багасгах шаардлагатай.
Эрчим хүчийн баримтлал: Индукторууд нь цахилгаан хангамжийн системүүд дэхь DC-DC хувиргагчид (жишээ нь buck болон boost хэлхээ) - ийн үндсэн бүрэлдэхүүн хэсэг юм. Эдгээр нь AI процессор, мэдрэгч, харилцаа холбооны модуль гэх мэт төхөөрөмжүүдэд янз бүрийн хүчдэлд тогтвортой цахилгаан эрчим хүчний эх үүсвэрийг нийлүүлж, энергийн тараалт, хувиргалтын үр ашгийг сайжруулдаг. Цахилгаан эсэргүүцэл багатай (DCR), чадлын алдагдал багатай өндөр хувиргалтын үр ашиг, ханасан гүйдэл өндөр, температур тогтвортой байдал өндөр байх шаардлагатай.
Сигналын боловсруулалт: Дохио боловсруулах системд индукторуудыг голчлон өндөр давтамжийн шуугиан, EMI-г дарахад ашигладаг бөгөөд дохионы цэвэр байдлыг хангана. Жишээлбэл, мэдэрхийн системд индуктор нь хүнтэй адил төстэй роботуудын гадаад орчинтойгоо мэдэрч, харилцан үйлчлэхийг хангаж өгдөг. Харилцаа холбоо, удирдлагын системүүдэд индукторууд EMI загварчлалыг ашиглан радар, камер, утасгүй харилцаа гэх зэрэг модульд саад болох дохионоос хамгаалах чадварыг хангаж, төхөөрөмжийн ажиллагааны тогтвортой байдлыг сайжруулдаг.
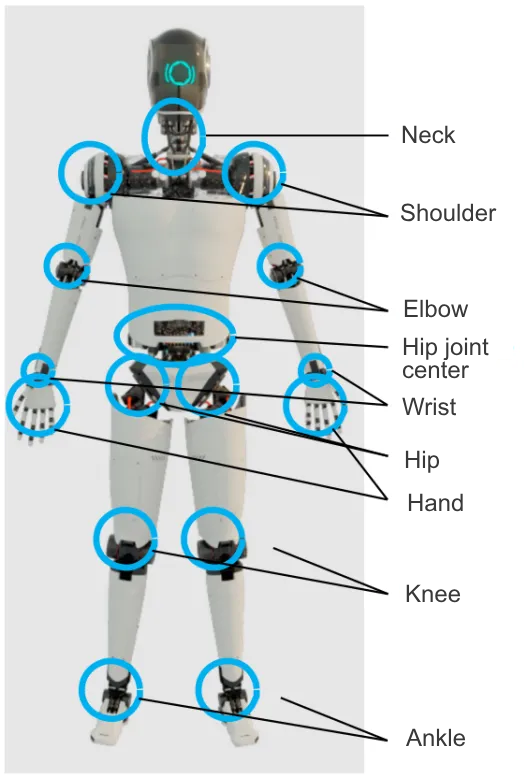
Зураг 1: Хүн хэлбэрт роботын нэгдсэн моторын үндсэн байршил (TI-ийн зургаас)
2- Хүн хэлбэрт роботын ороомог элементийн эрэлт
Хүн хэлбэрт роботын электрон систем нь нарийн төвөгтэй бөгөөд нарийвчлан хөдөлгөөнийг удирдах, найдвартай холбоо харилцааг хангахын тулд ороомог шиг суурь хэсгүүдийн дэмжлэггүйгээр боломжгүй. Мөн хүн хэлбэрт роботын техникийн онцлог нь ороомог бүтээгдэхүүний гүйцэтгэл, бүтцийн загварчлалын өндөр шаардлагыг тодорхойлдог. Эдгээр шаардлагууд нь виз үндсэндээ дараах байдлаар илэрхийлэгдэнэ:
2.1 Багасгасан хэмжээ ба өндөр чадлын нягт
Хүн хэлбэрт роботын доторх зай маш нягт бөгөөд олон тооны мотор, тооцооллын нэгж (CPU/GPU), мэдрэгч гэх мэт төхөөрөмжүүдийг нэгтгэсэн байдаг тул цахилгаан хангамжийн хэлхээний самбар (жишээ нь POL, ачааллын цэгийн хувирга) жижигхэн хэмжээтэй байх ёстой. Индукторууд нягт бүтэцтэй загварын хязгаарлагдмал зайнаас шалтгаалан жижиг, хөнгөн байх шаардлагатай бөгөөд цөөнхөн зай эзлэх чадварын өндөр нягтралыг хадгалах ёстой. Хийц нь хэвтэй эсвэл хаалттай индукторууд жижиг физик хэмжээндээ маш их салгарлын гүйдэл болон температур ихсэх гүйдлийг тэсвэрлэж чаддаг бөгөөд хязгаарлагдмал орон зайд өндөр чадал гаргахад энэ нь мааж үүрэг гүйцэтгэдэг.
2.2 Хүчтэй цахилгаан соронзон саатлын эсрэг тэсвэрт чадвар
Роботын дотоод цахилгаан соронзон орчин нь нарийн бөгөөд өндөр хурдны тоон хэлхээ, хөдөлгүүрийн хөтлөгчийн хүчтэй залгааны шууги, мэдрэг сенсорууд (жишээ нь IMU, камер) агуулдаг. Хамгаалалтгүй ороомог ашигласнаар хүчтэй соронзон талбай үүсэх бөгөөд цахилгаан соронзон бэрхшээлд үүсгэгч болох тул сенсорын уншлага, хяналтын системийн тогтвортой ажиллагаанд хүндээр нөлөөлнө. Хамгаалалттай ороомог нь соронзон урсгалыг хамгийн бага болгох бөгөөд цахилгаан соронзон бэрхшээлийг үр дүнтэй бууруулах тул системийн бусад бүрэлдэхүүн хэсгийн найдвартай ажиллалтыг хангана. Тиймээс, хийц болгосон ороомог, өндөр гүйдэлтэй цахилгаан ороомог болон соронзон хамгаалалттай бүтэц бүхий бусад цахилгаан ороомгууд нь илүү тохиромжтой сонголт юм.
2.3 Өндөр ханасан гүйдэл
Роботын динамик ачаалал эхэнд нь гэнэт эхлэх, явж байх, хүндийг өргөх зэрэг үед маш ихээр өөрчлөгддөг бөгөөд мотор болон тооцооллын нэгжийн гүйдэл мгновенно ихсэж хурдан нэмэгддэг. Индуктор өндөр гүйдэлд соронзон ханасныг зогсоох чадвартай байх ёстой (өөрөөр хэлбэл индукцийн утга асар багасах ёсгүй), үгүй бол цахилгааны дамжуулалт удирдлагаас гарч, системийн хүчдэл буурсан, дахин эхэлнэ. Тиймээс индукц нь "мягт ханах" шинж чанартай байх шаардлагатай, өөрөөр хэлбэл ханасан гүйдлийн ойролцоо очих үед индукцийн утга ангилах биш, удаан буурдаг байх ёстой. Энэ нь цахилгааны удирдлагын системд тусгал үзүүлж, системийн найдвартай байдлыг сайжруулдаг.
2.4 Хүчтэй хэвийн бус хөдөлгөөн ба нөлөөллийн тэсвэрт чадал
Хүн хэлбэрт роботууд нь байнга хөдөлж, их хэмжээний механик хурц хөдөлгөөнтэй байдаг тул индуктор нь чичирхийлэл болон шокийн эсэргүүцэлтэй байх ёстой, түүний мултуур холболтууд бат бөх байх ёстой бөгөөд гаднах бүрхүүл болон доторын ороомог механик ачааллыг тэсвэрлэх чадвартай байх ёстой. Хэлбэржсэн бүтцийн индуктор нь соронзон материал дотор ороомогийг бүрмөсөн хатуужуулдаг бөгөөд маш өндөр механик хатуутай байдаг тул шокийн эсэргүүцэл маш сайн байдаг бөгөөд иймд хүн хэлбэрт роботын системүүдэд өргөнөөр ашигладаг.
2.5 Өндөр давтамж, өндөр температуртай орчинд дасах
Индуктор нь сайн өндөр давтамжийн онцлог шинж чанартай байх ёстой бөгөөд үүнийгээр өндөр давтамжийн саатлыг үр дүнтэй дарангуйлах, далайц болон шуугианыг багасгах, өндөр давтамжид энергийн алдагдлыг бага түвшинд хадгалах боломжийг олгодог бөгөөд хувиргалтын үр дүнтэй ажиллагааг сайжруулдаг.
Гэхдээ индуктор нь өндөр температуртай орчинд индукцлэлтийн утгыг тогтвортой хадгалж, Q утгийг бага бууруулах, гажиг гарах магадлал багатай байх ёстой тул роботын индукцлэлтийн ажиллагаа удаан хугацаанд найдвартай байна.
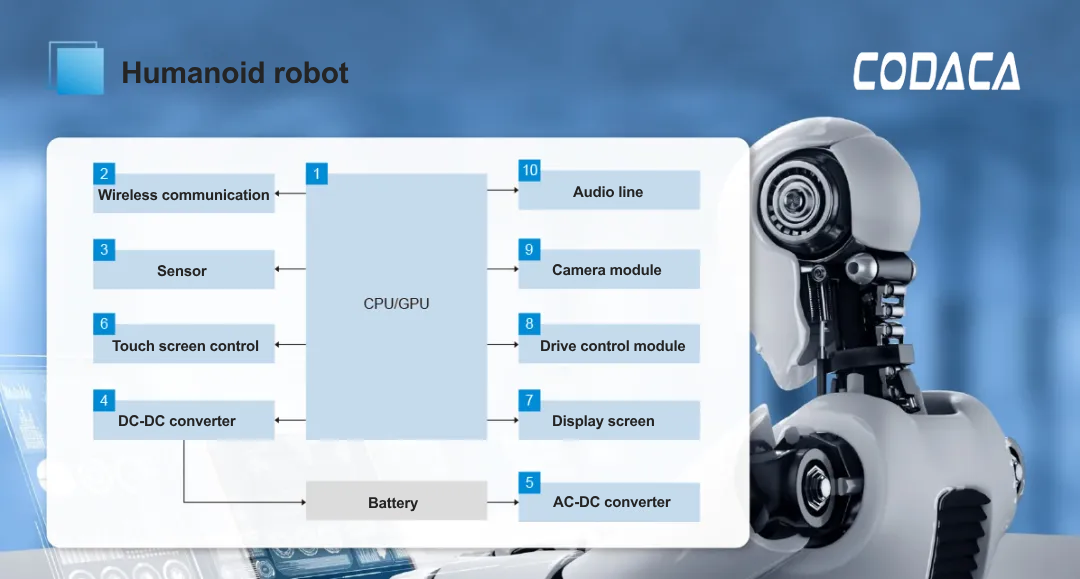
Зураг 2. Хүн хэлбэрт роботод индукторыг хэрэглэх
3- Codaca хүн хэлбэрт роботын индукторын шийдэл
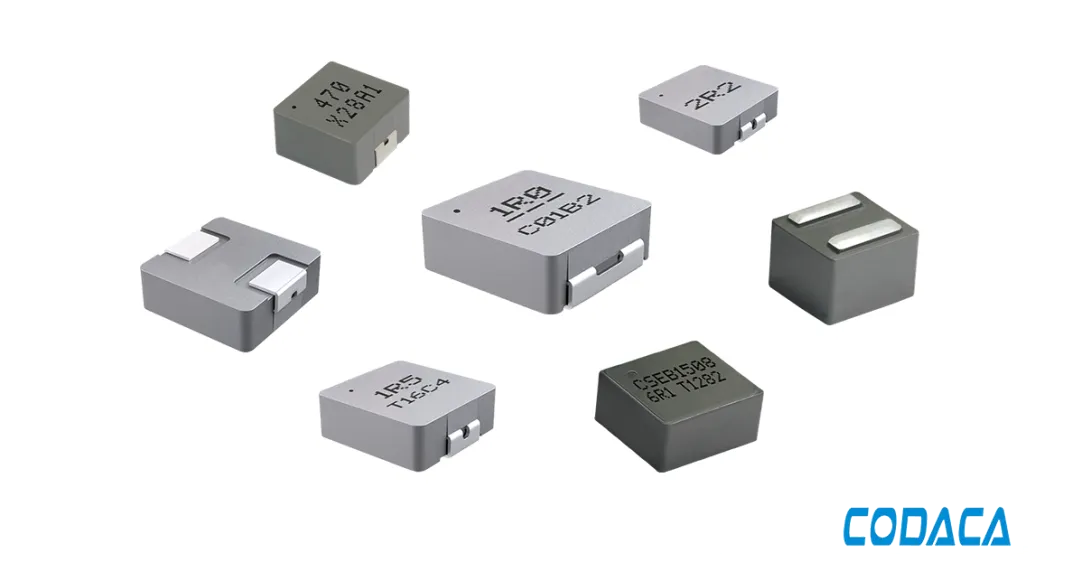
Хүн хэлбэрт робот зэрэг хэрэглээнүүд нь их чадал, өндөр үр дүнтэй, найдвартай, нарийн цахилгаан соронзон орчны нөхцөл, хатуу механик нөхцөл байдлыг нэгтгэсэн байдаг тул их гүйдэл, хамгаалалттай, хайлш нунтгийн зүрхэнтэй индукторууд нь тэжээлийн хэлхээнд, ялангуяа гол тооцоолох нэгж болон холбоосны моторын хөдөлгүүрийн POL тэжээлийн хэлхээнд үл хөдлөх гол сонголт болсон. Ингэснээр гүйцэтгэл, хэмжээ, найдваршил гэсэн гурван үндсэн даралтыг төгс тэнцвэртэй болгосон дизайн хангасан.
Тус байгууллага нь хүний төстэй роботуудад зориулсан тохируулагч индукторын шийдлүүдийг өөрсдийн судалгаа, хөгжүүлэлт болон технологийн шинэлэг байдлаар гаргаж ирсэн бөгөөд соронзон хамгаалалттай бүтэц, өндөр гүйдэлтэй цахилгаан индуктор, зэс багатай ороомог, ердийн горимын ороомог гэх мэт олон ангилал, загварын бүтээгдэхүүнүүдийг гаргасан. Эдгээр нь хүний төстэй роботын янз бүрийн нөхцөлд индукторын өндөр үзүүлэлт шаардсан шаардлагыг хангахын тулд янз бүрийн цахилгаан шинж чанарыг нийлүүлэх боломжтой бөгөөд роботын холбоо, навигацийн модуль, цахилгаан хангамжийн модуль, хөдөлгүүрийн удирдлагын модуль, роботын удирдлагын самбар болон бусад модульд өргөн ашигладаг.
3.1 Шигшүүр өндөр гүйдэлтэй цахилгаан индуктор
Цогц өндөр эрчим хүчний индуктор ихэвчлэн хүн төст роботын хөдөлгүүрийн хяналт, цахилгаан эрчим хүчний удирдлагын системийн DC-DC модульд ашигладаг. Өндөр гүйдэл бүхий ороомог нь Codaca компанийн өөрсдийн хөгжүүлсэн алдагдал багатай металл шороонцор материал ашигласан бөгөөд салсын өндөр гүйдэл, бага алдагдал, өндөр хувиргалтын үр дүнтэй, өндөр ажиллах температур зэрэг онцлог шинж чанартай байх нь хүн төст роботын үйлдлийн чадвар, идэвхитэй ажиллах чадлыг хангана. Өндөр гүйдэл бүхий ороомгийн гүйдэл 422А хүртэл, ажиллах температур 170°C хүртэл хүрч болно. Мөн энэ бүтээгдэхүүн соронзон хаалттай бүтэцтэй бөгөөд цахилгаан соронзон саармагжуулалтанд тэсвэртэй. Энэ нь хүн төст роботуудын өндөр салсын гүйдэл, өндөр ажиллах температур, бага цахилгаан соронзон саармагжуулалт шаардсан шаардлагыг бүрэн хангана.
Зөвлөгдөх загварууд: CSBX , CSBA , CSCM , CSUT , CSCIL , гэх мэт.

3.2 Нимгэн, хөнгөн хэвтэй ороомог
Хөөлгөт индукторууд ихэвчлэн гуманоид роботын дэлгэцэнд, товчлуурын модуль, DC-DC модуль зэрэгт голчлон ашигладаг. Хийц болон цахилмайг CODACA компани нь бие даан хөгжүүлсэн бага алдагдалтай хайлшны нунтгараар хийдэг бөгөөд энэ нь алдагдал багатай, өндөр ашигт үйлчилгээтэй, өргөн давтамжийн хүрээтэй, чимээг маш бага болгож чадна. Захидалт нь нимгэн, хөнгөн бөгөөд (хамгийн багад нь 2 мм) хэмжээтэй тул PCB-ийн зайг хэмнэх, өндөр нягтранд суурилуулахад тохиромжтой, механик шохойгоос болон хэлбийлтийн эсэргүүцэл сайн (10G-с илүү хэлбийлтийн тэсвэртэй) бөгөөд гуманоид роботын өндөр чадлын нягт, өндөр тэвчээр шаардлагыг хангана.
Зөвлөгдөх загварууд: CSAG , CSAC , CSAB , CSEB , CSHB , гэх мэт.
3.3 SMD цахилмай
Codaca SMD цахилмайнууд камерын модуль, дууны модуль, DC-DC модуль зэрэгт голчлон ашигладаг бөгөөд цахилмайн хэмжээ бага, их гүйдэл, өндөр хувиргалтын үр дүнтэй зэрэг шаардлагыг хангах боломжтой.
Зөвлөгдөх загварууд: SPRHS , CSUS , ИТХ , VCRHS , SPQ , гэх мэт.

Магнедийн бүрэлдэхүүн хэсгийн технологийн салбарын урьдчилсан нийлүүлэгч болох Codaca Electronics нь 24 жилийн турш индуктачийн хөгжүүлэлтэнд тусгайлан анхаарч байгаа бөгөөд инженерүүд робот шиг тус бүрэлдэхүүн хэсгийн тодорхой ажиллагааны шаардлагад нийцүүлэн индуктачийн тохиромжит индуктал, нэрлэсэн гүйдэл, шилжилтийн давтамж, бүтээгдэхүүний хэмжээ гэх мэт параметрүүдийг сонгож болно. Дэлгэрэнгүй мэдээлэл авахын тулд Codaca-ын борлуулалтын ажилтнуудад холбоо барина уу.