

Pembangunan pesat industri kenderaan tenaga baharu telah memacu pertumbuhan eksplodis setiap rantai industri, kecerdasan automotif, pemanduan autonomi telah menjadi daya saing teras yang paling penting dalam arah kenderaan tenaga baharu, kepada penggabungan pusat otak dan domain controller yang tinggi membawa cabaran dan peluang baru, terutamanya untuk kebolehpercayaan bekalan kuasa tukar DC-DC, ketumpatan kuasa tinggi, EMC bekalan kuasa tukar, kecekapan tinggi, berkesan dari segi kos membawa peluang dan cabaran baru.
Qualcomm sebagai pembekal pengawal domain kokpit pintar, SA8155 dan SA8295 memainkan peranan yang penting, kuasa tahap 1 SOC domain kawalan pusat (kuasa yang ditukarkan daripada input bateri tahap 1) arus transien, arus operasi stabil, kecekapan operasi mod siap sedia, kos, percanggahan dalam reka bentuk EMC kuasa suis telah menjadi cabaran besar untuk reka bentuk bekalan kuasa BUCK. Bagaimana untuk menyelesaikan dan menyeimbangkan percanggahan ini merupakan arah teknikal bagi reka bentuk keseluruhan seperti arkitektur kuasa suis, cip kuasa, induktor, Mosfet, kapasitor dan sebagainya.
Kertas kerja ini menggabungkan reka bentuk bekalan kuasa tahap 1 kawalan domain tengah automotif dengan arus dinamik pensuisan kuasa besar (100-300%), untuk meneroka reka bentuk bekalan kuasa DC-DC, termasuk skema bekalan kuasa, pemilihan induktor, kapasitor dan kaedah reka bentuk lain; mengambil kira isu-isu cabaran berkaitan saiz, kos, kecekapan dan prestasi untuk dikaji dan direalisasikan dalam reka bentuk praktikal.
Kertas kerja ini meneroka dan melaksanakan reka bentuk praktikal satu-tahap bekalan kuasa suis BUCK dengan menggunakan pengawal domain Qualcomm SA8295 sebagai contoh.
Rangkaian artikel ini mengandungi tiga siri (akan dikemaskini secara berterusan pada masa hadapan):
01- Mengekalkan Reka Bentuk Kuasa Tahap 1 Pengawal Domain Automotif Qualcomm: Reka Bentuk dan Pengiraan Bekalan Kuasa (bab ini)
02- Mengupas Reka Kuasa Domain Controller Automotif Qualcomm Tahap 1: Reka Skematik dan Reka PCB
03- Menganalisis Reka Kuasa Domain Controller Automotif Qualcomm Tahap 1: Pengukuran Ujian Prestasi
1- Objektif dan Cabaran Reka Bentuk
1.1 Kehendak Arus Transien SA8295

Jadual 1: Kehendak Rekabentuk Bekalan Kuasa SA8295
1.2 Kekuatan Standby SA8295
Penggunaan kuasa stanby bekalan kuasa 3.3V SOC Qualcomm dalam julat 4-7.5mA (termasuk penggunaan kuasa penyegaran sendiri memori), menyokong penjagaan stanby.
Keseluruhan arus anggaran kenderaan untuk otak tengah (domain controller kokpit) adalah 7-10mA (13.5V), modul 4G/5G sahaja penggunaan 4-5mA, arus SA8295 Qualcomm 13.5V kurang daripada 3mA (40mW).
1.3 Tiga cabaran
1.3.1 Cabaran Output Arus Bekalan Kuasa Peralihan Domain Control Qualcomm SA8295 1:
Arus transien besar, 3.3V, 18 Amp (0.1ms), 0.1ms untuk bekalan kuasa beralih DC-DC sudah termasuk dalam keadaan mantap berkala panjang, memerlukan reka bentuk bekalan kuasa Buck mengikut keluaran stabil 18 Amp.
1.3.2 Cabaran dinamik arus tinggi bagi bekalan kuasa beralih domain kawalan Qualcomm SA8295 2:
Arus operasi berterusan domain kawalan SA8295 berada dalam julat 5-9 amp, yang akan menyebabkan induktans bagi bekalan kuasa beralih (saiz induktans adalah berkadar songsang dengan saiz pemilihan arus operasi stabil) mempunyai perbezaan lebih daripada 300% dari segi isipadu, kos dan frekuensi, iaitu sesuatu percanggahan yang besar.
1.3.3 Cabaran kecekapan kuasa mikro bagi bekalan kuasa beralih domain kawalan Qualcomm SA8295 3:
Penggunaan kuasa stanby, memerlukan kecekapan penggunaan 3mA pada 13.5V sebanyak 70%, iaitu satu cabaran besar dari segi reka bentuk senibina penguasa kuasa dan pemilihan induktor.
Reka bentuk ini berpandukan reka bentuk bekalan kuasa SA8295 satu peringkat yang paling mencabar, bagi meneroka kesulitan utama dalam teknologi bekalan kuasa suis dan penyelesaian teknologi DC-DC.
2- Perbandingan pemilihan program
2.1 Keperluan teknikal bekalan kuasa kawasan kawalan Qualcomm SA8295
Seperti ditunjukkan dalam jadual 2:
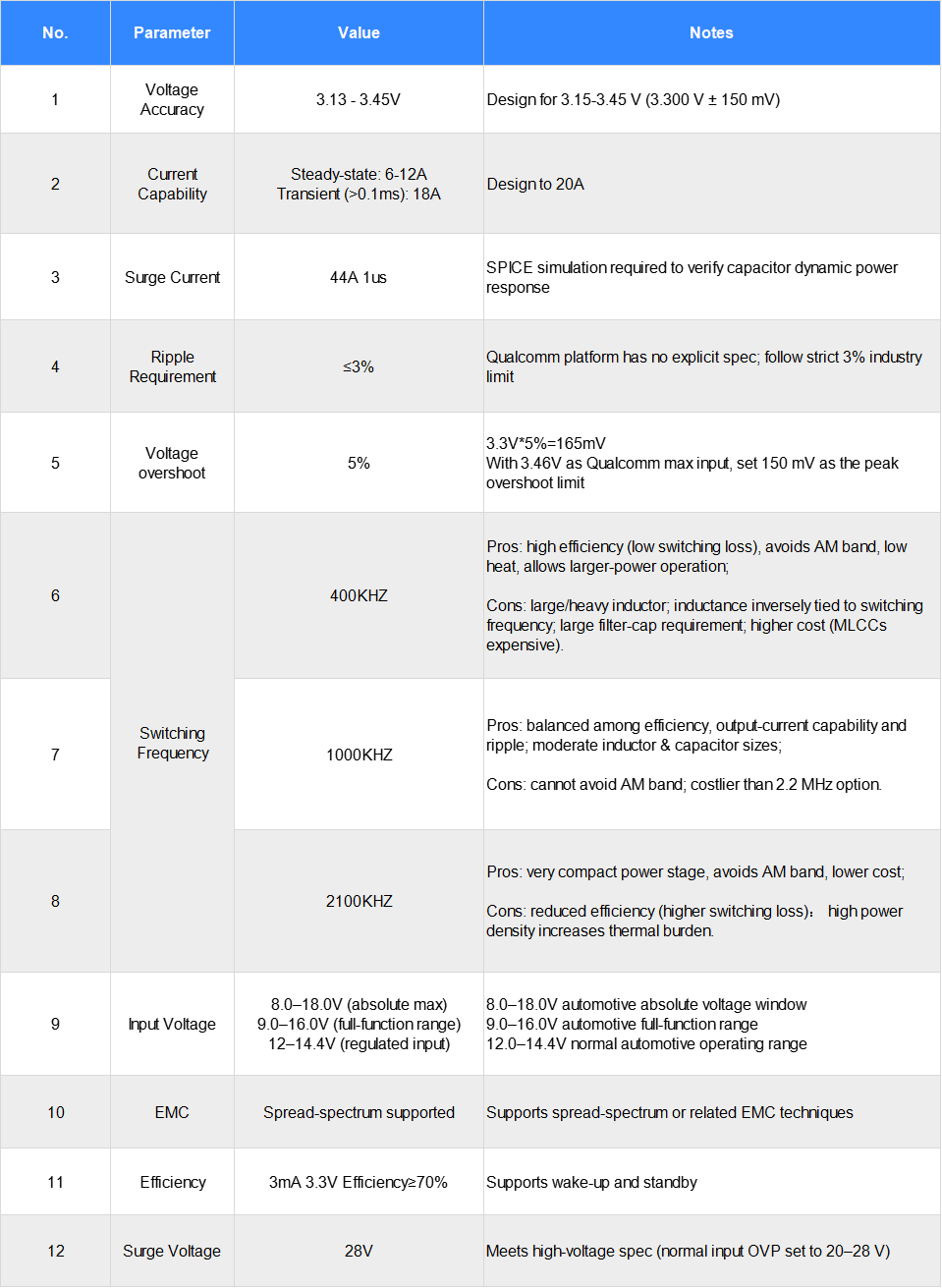
Jadual 2: Spesifikasi reka bentuk keperluan bekalan kuasa Qualcomm SA8295
2.2 Reka bentuk program dan maklumat teknikal
MPQ2918, MPQ2930, LM25141-Q1, MAX20098, LTC7803, dan LM25149-Q1 boleh memenuhi keperluan reka bentuk. Dalam reka bentuk ini, LM25149-Q1 dipilih sebagai skema reka bentuk bekalan kuasa peringkat pertama untuk pengawal domain otak tengah ini.
2.2.1 Alamat rasmi LM25149-Q1:
https://www.ti.com.cn/product/cn/LM25149-Q1?keyMatch=LM25149-Q1
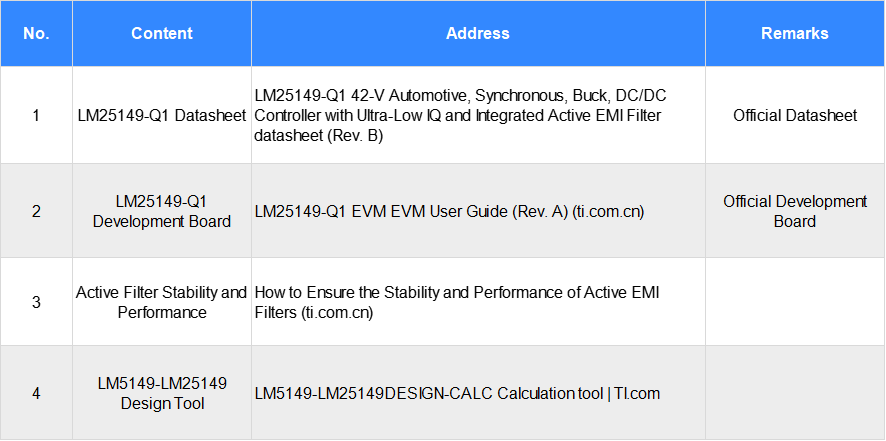
Jadual 3: Rujukan Reka Bentuk LM25149-Q1
2.2.2 Lembaran Data LM25149-Q1:
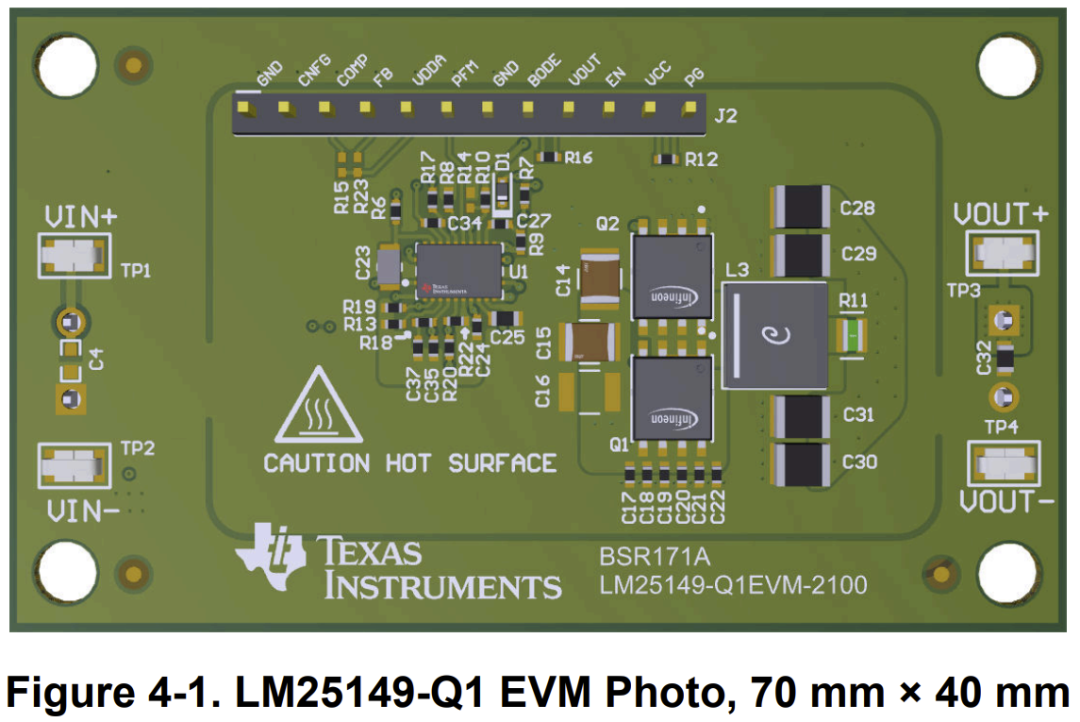
2.2.3 Papan pembangunan LM25149-Q1:
Panduan Pengguna EVM LM25149-Q1 (Rev. A) (ti.com.cn)
2.2.4 Kestabilan penapis aktif dan prestasi:
Cara Memastikan Kestabilan dan Prestasi Penapis EMI Aktif (ti.com.cn)
2.2.5 LM5149-LM25149 Alat Reka Bentuk :
Alat Pengiraan LM5149-LM25149DESIGN-CALC | TI.com
3- Reka bentuk dan pengiraan bekalan kuasa SINKRON BUCK
3.1 Spesifikasi utama dan parameter reka bentuk LM25149
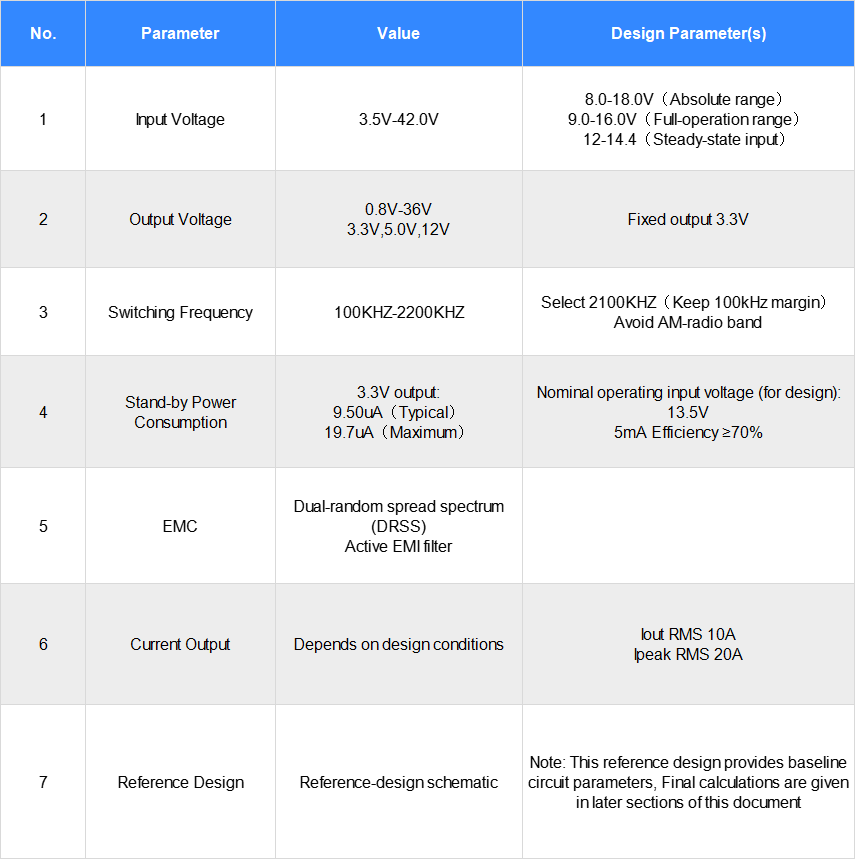
Jadual 4: Spesifikasi keperluan reka bentuk bekalan kuasa Qualcomm SA8295
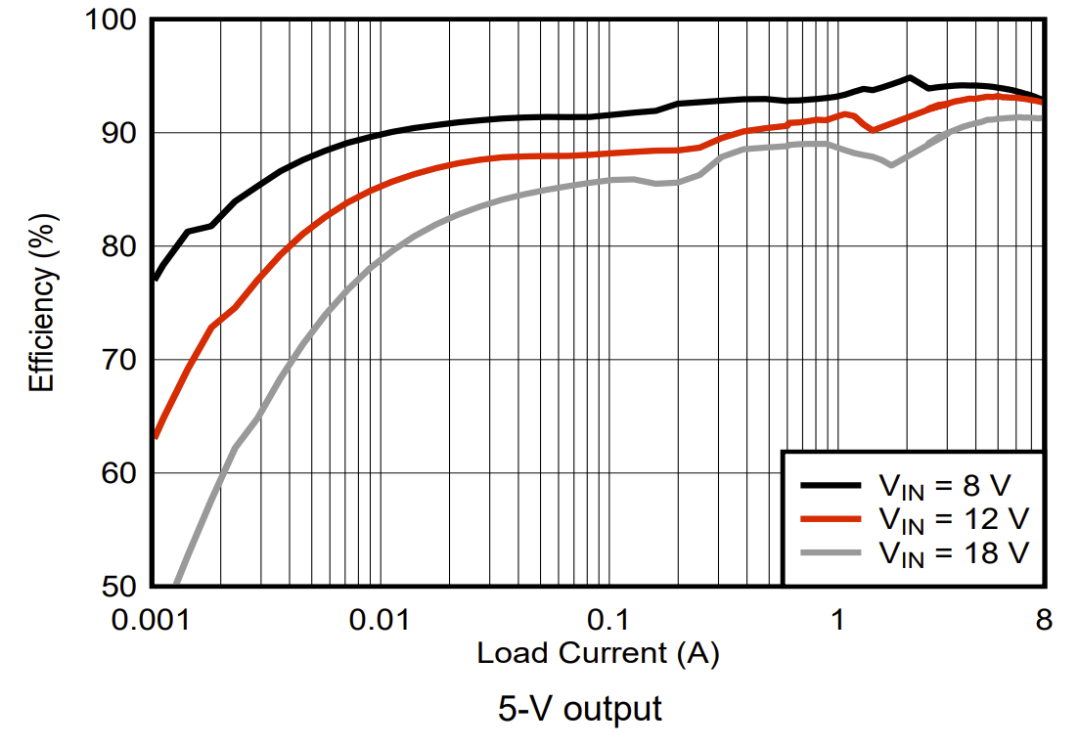
Kecekapan
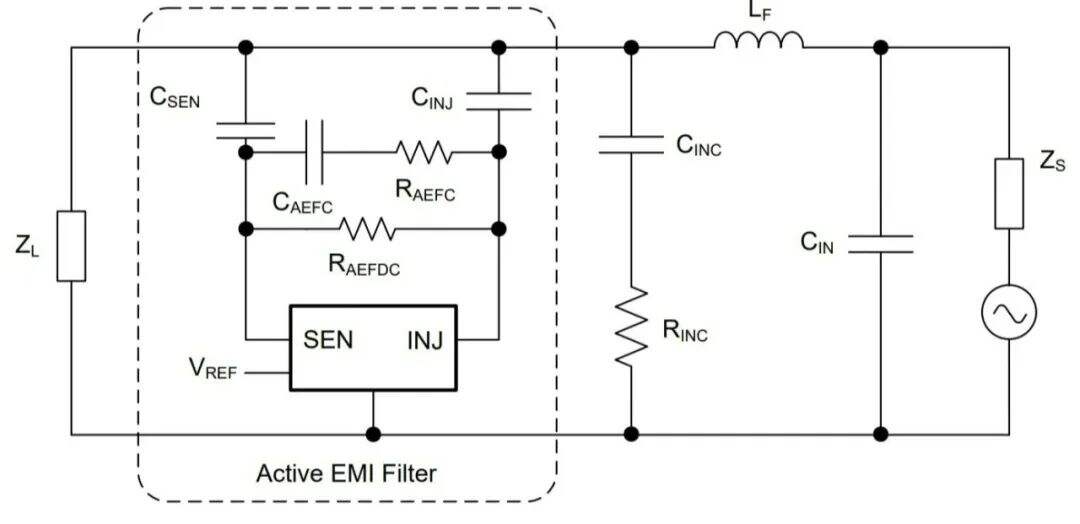
Penapis EMI Aktif
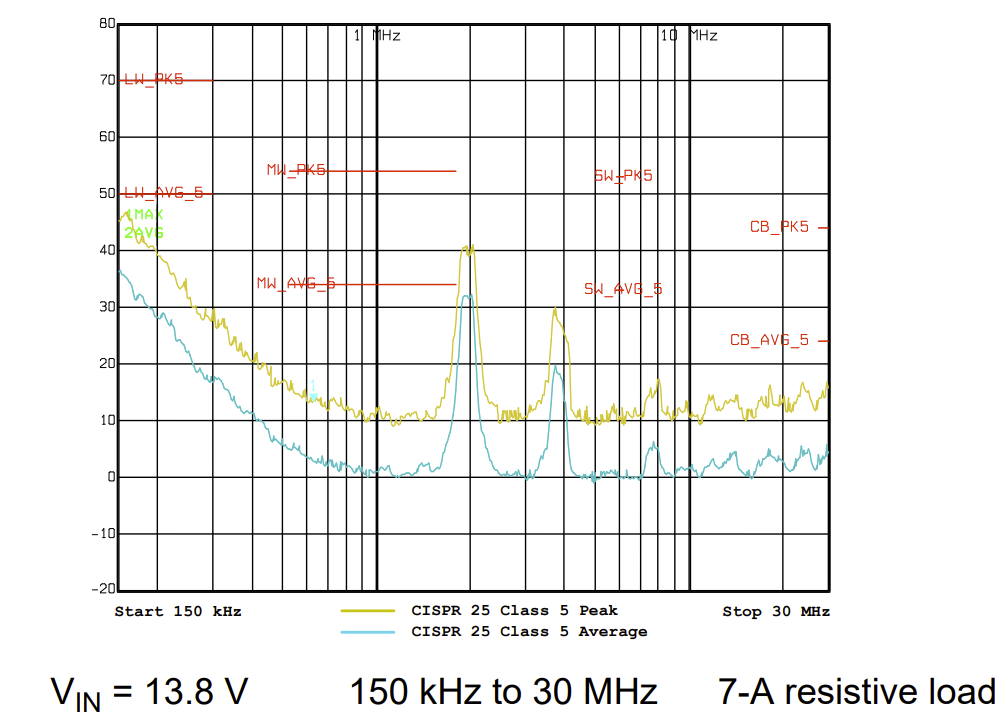
Pengujian EMI
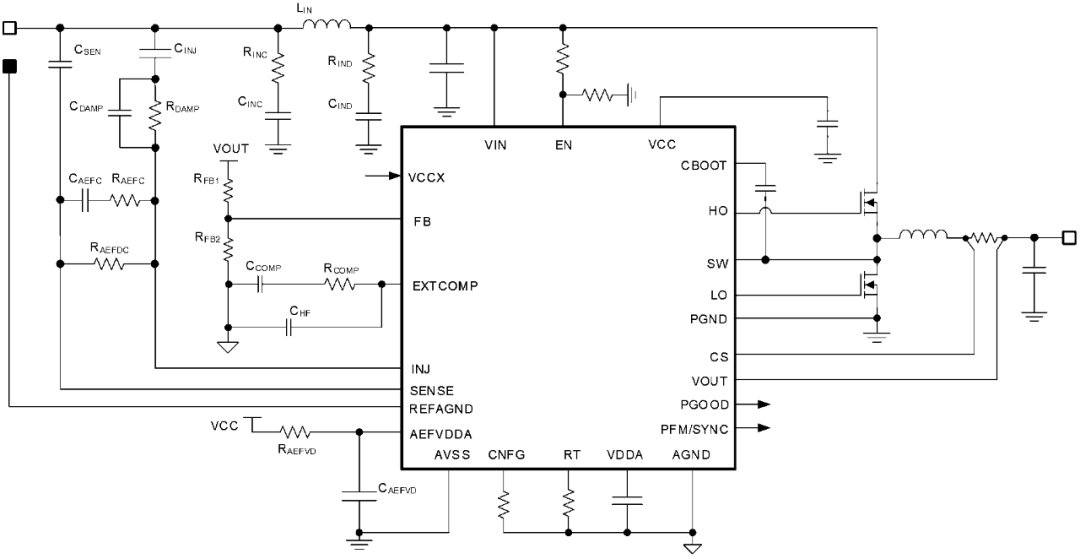
Rajah Reka Bentuk Rujukan
Papan Penilaian Penyelesaian Reka Bentuk Rujukan
3.2 Pengiraan Pemilihan Induktor LM25149 Synchronous BUCK
3.2.1 Formula bekalan kuasa Synchronous BUCK:
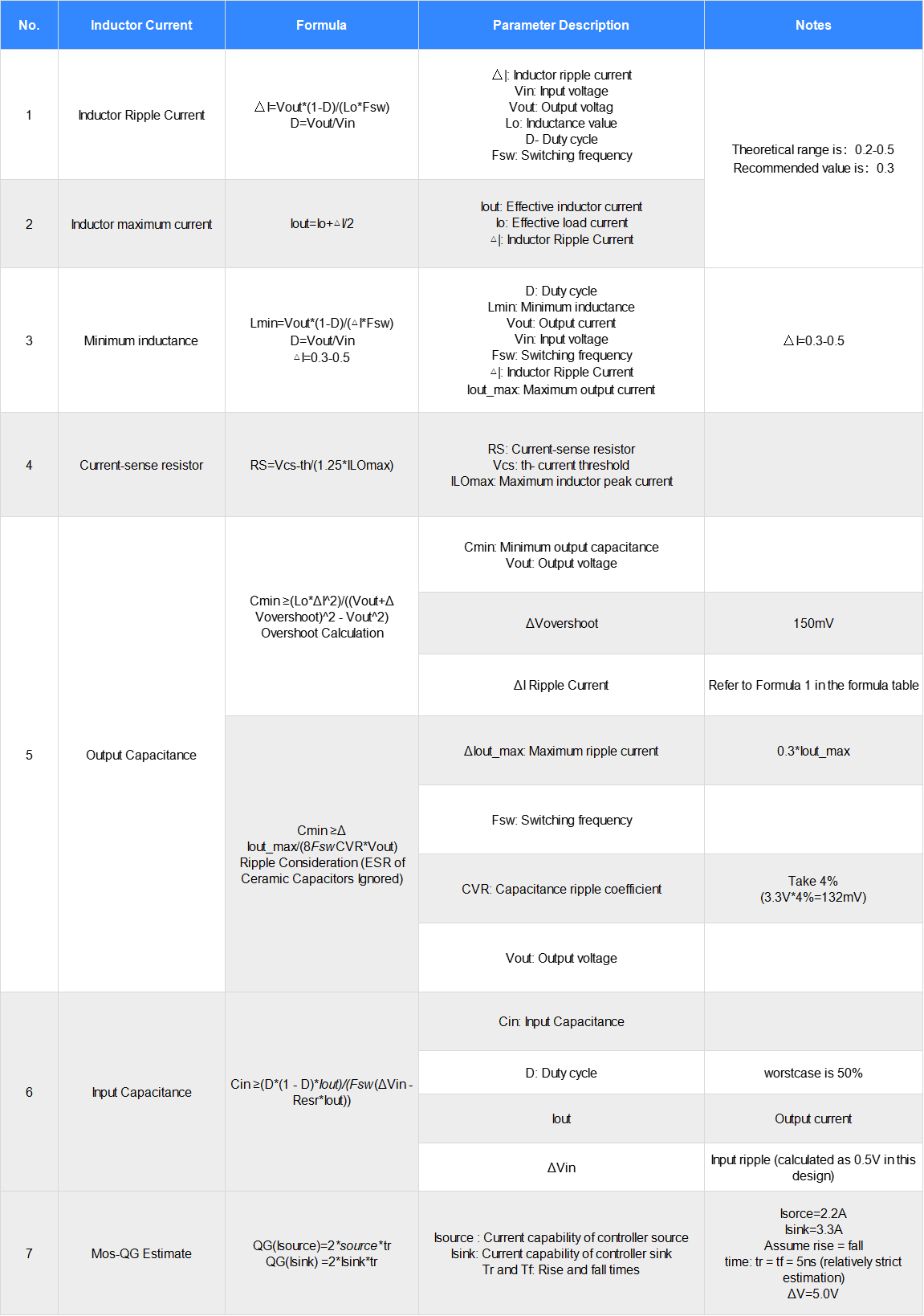
Jadual 5: Persamaan pengiraan reka bentuk bekalan kuasa Synchronous BUCK
3.4 Pengiraan Induktans Minimum
(Untuk formula, lihat Jadual 5.)
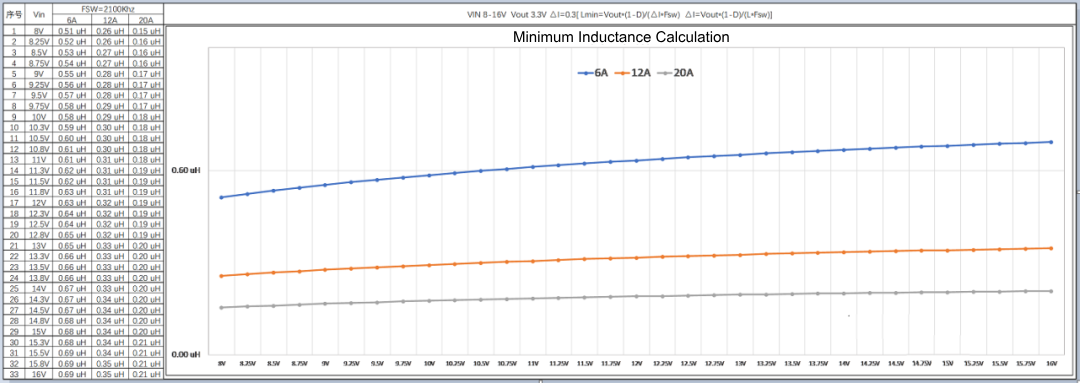
Jadual 6: Graf yang dikira bagi induktans minimum (∆I=0.3)
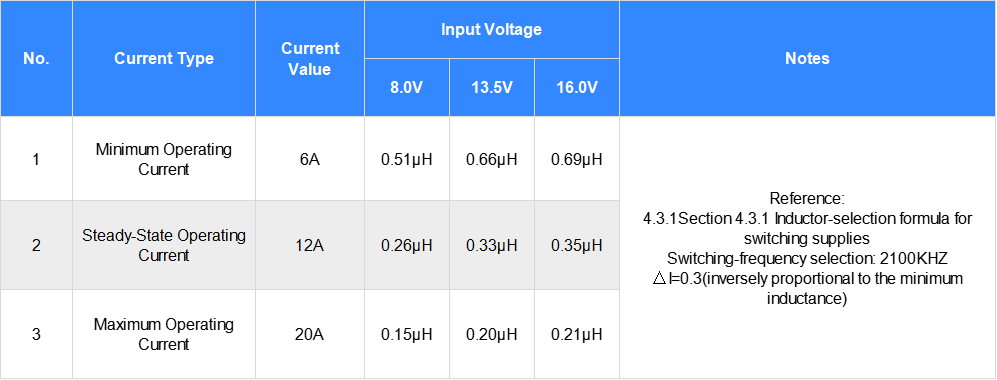
Jadual 7: Pengiraan induktans minimum
3.4.1 Ringkasan data pengiraan induktans:
① Jika reka bentuk merangkumi julat 6-20A (AI=0.3 pengiraan), input 16V, output 6A, induktans ≥ 0.69μH.
② Pengiraan teori induktans bekalan kuasa suis Lmin: ≥ 0.69μH (secara teori);
③ Dengan mengambil kira pemilihan reka bentuk sebenar dan ralat induktans ±20%, pilih 0.82μH dan 1.0μH sebagai reka bentuk terbaik (nilai induktans meningkat, isipadu induktans meningkat, kos meningkat, SRF menurun).
3.5 Pengiraan Arus Induktor
(Formula: rujuk jadual 1 dan 2 dalam jadual 5)
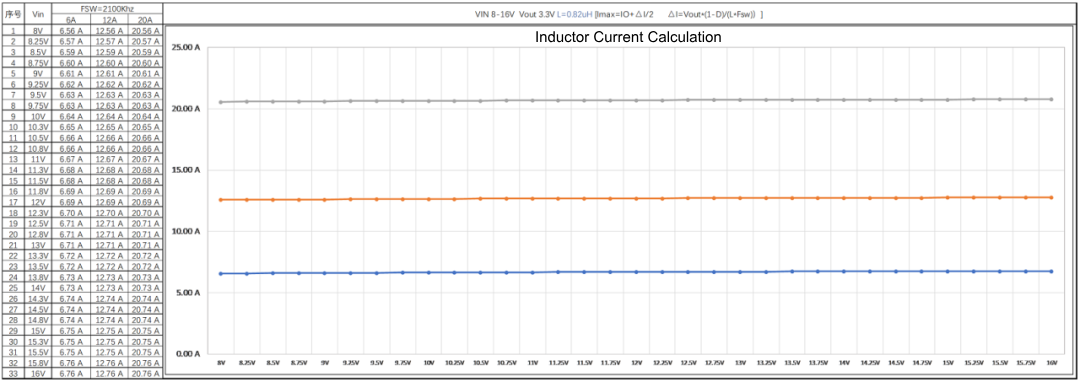
Jadual 8: Pengiraan Arus Induktor 0.82μH
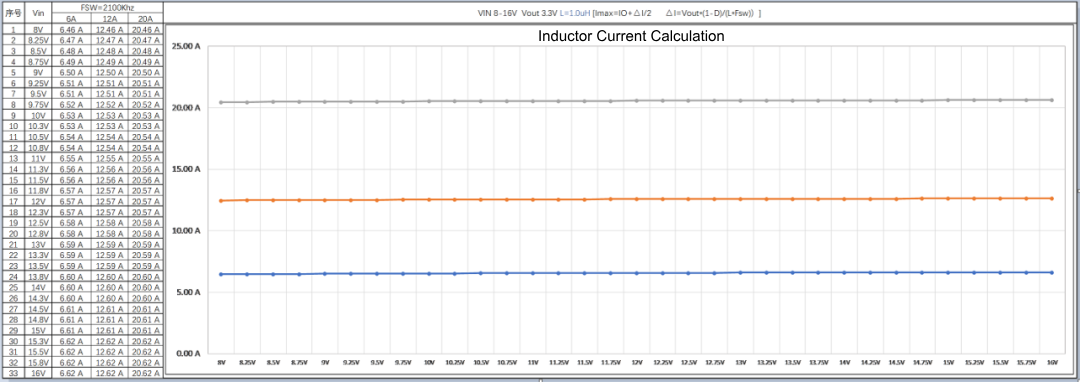
Jadual 9: Pengiraan Arus Induktor 1.0μH
3.5.1 Arus penggian induktornya dikira secara teori ≥ 20.76A, dibundarkan kepada 21A:
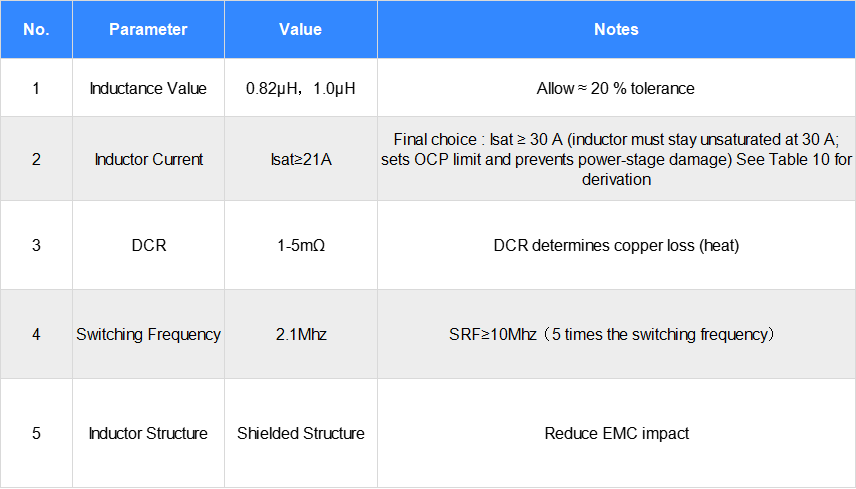
Jadual 10: Penunjuk Kearuhan
4- Pemilihan inductor bekalan kuasa beralih
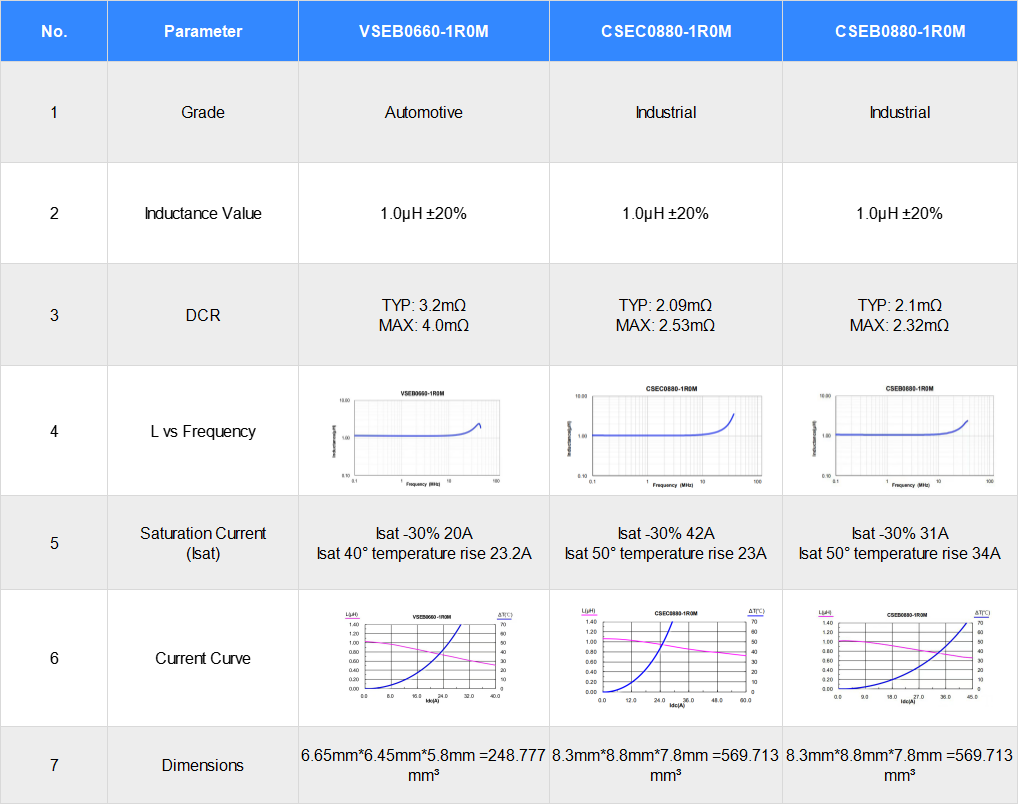
Jadual 11: Pemilihan Inductor
4.1 Pengiraan Rintangan Pensampelan Arus Inductor LM25149 Bekalan Kuasa Beralih
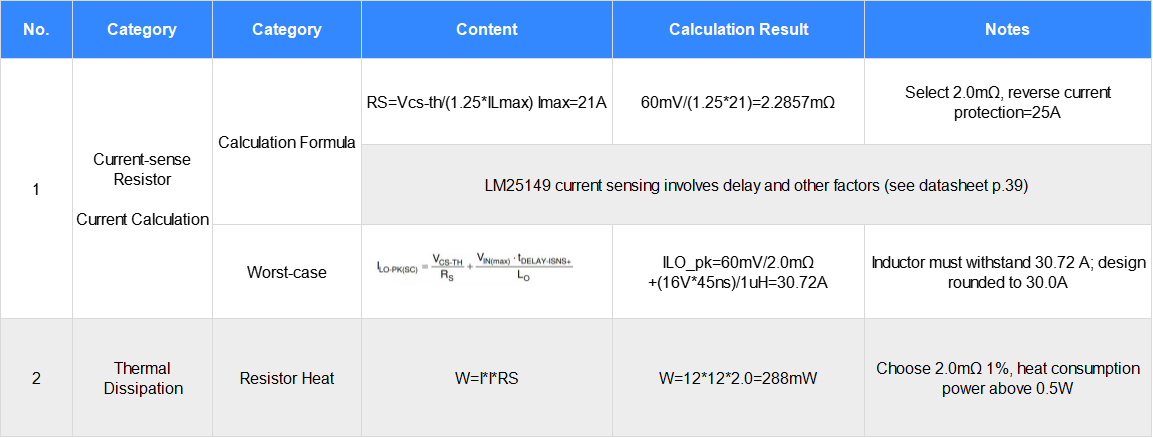
Jadual 12: Pengiraan teori rintangan pensampelan arus inductor
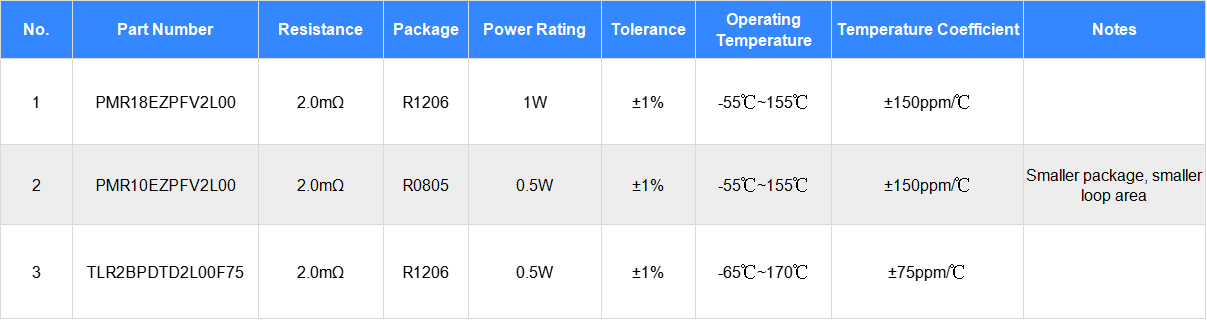
Jadual 13: Pemilihan Perintang Pensampelan Arahan
4.2 Pengiraan kapasitan output bekalan kuasa beralih BUCK segerak
(Pengiraan kapasitan output: rujuk formula dalam Jadual 5)
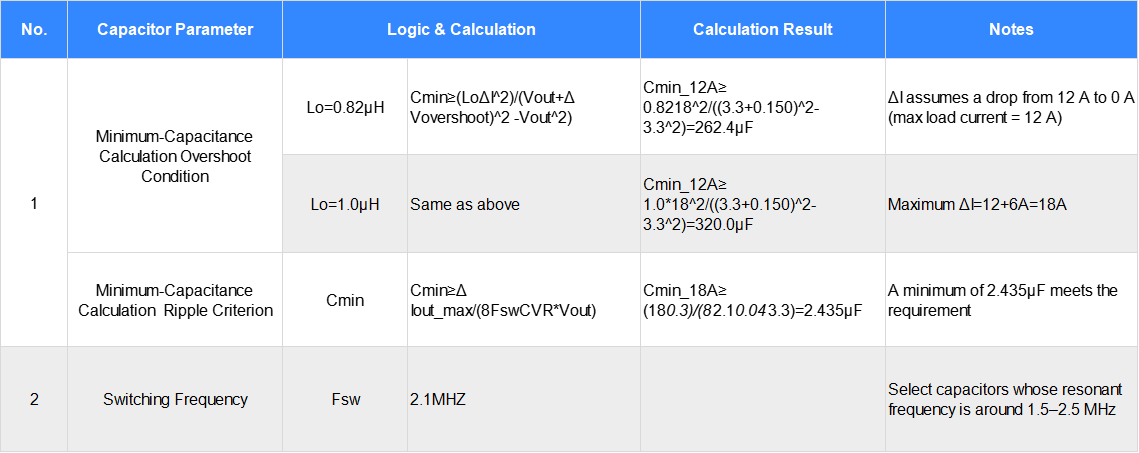
Jadual 14: Pengiraan kapasitan output bekalan kuasa beralih BUCK segerak
Bagi reka bentuk bekalan kuasa pengekod sinkron BUCK, terdapat percanggahan antara prestasi kapasitor penapis input dan output, isipadu, kos, spesifikasi kapasitans serta ujian di bawah keadaan tertentu. Perbezaan dalam proses ujian dan peralatan pengukuran boleh menyebabkan indeks yang sama mempunyai perbezaan sebanyak 10-50%. Prestasi akhir direka bentuk mesti disahkan melalui amalan saintifik dan pengujian semasa proses penyahpepijat (tiada penyelesaian terbaik untuk reka bentuk, hanya pemilihan yang sesuai dengan senario) (Tiada penyelesaian terbaik untuk reka bentuk, cuma pilih yang sesuai dengan senario).
Kapasitor pengekod perlu memenuhi: kapasitan ≥ 320uF (keperluan overshoot), kapasitor seramik mempunyai kapasitan lebih besar daripada 2.435uF (bukan syarat utama, tetapi adalah baik jika dipenuhi)
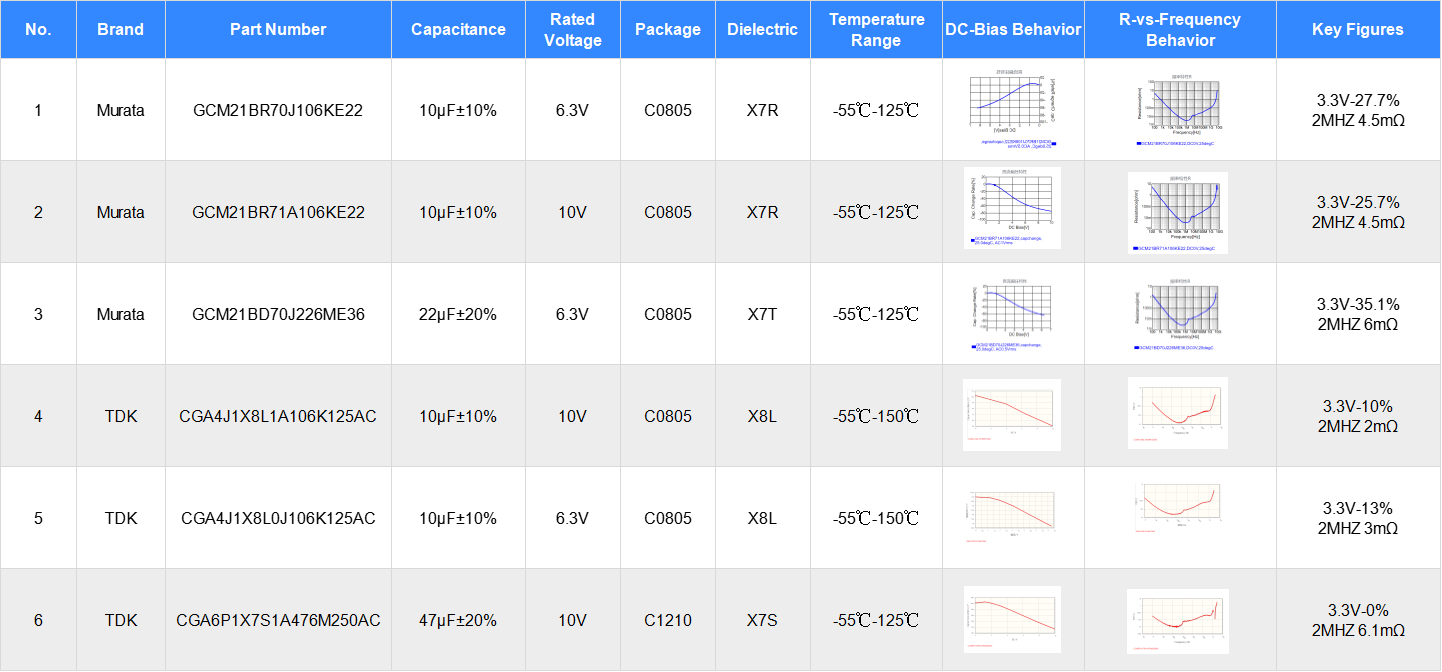
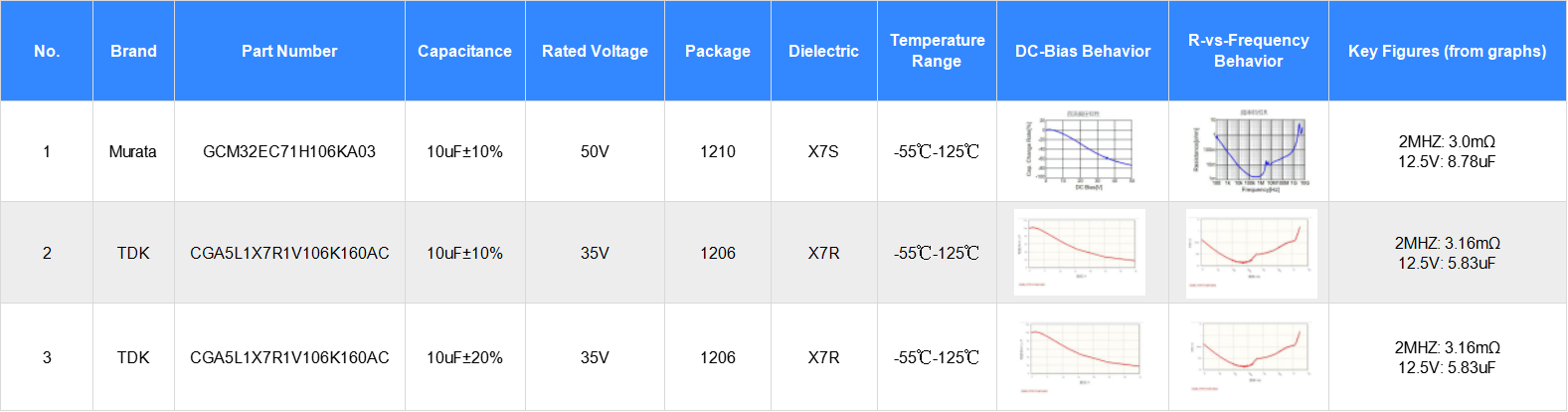
Jadual 15: Cadangan Pemilihan Model Kapasitor Penapis Output Bekalan Kuasa Penyelekoh
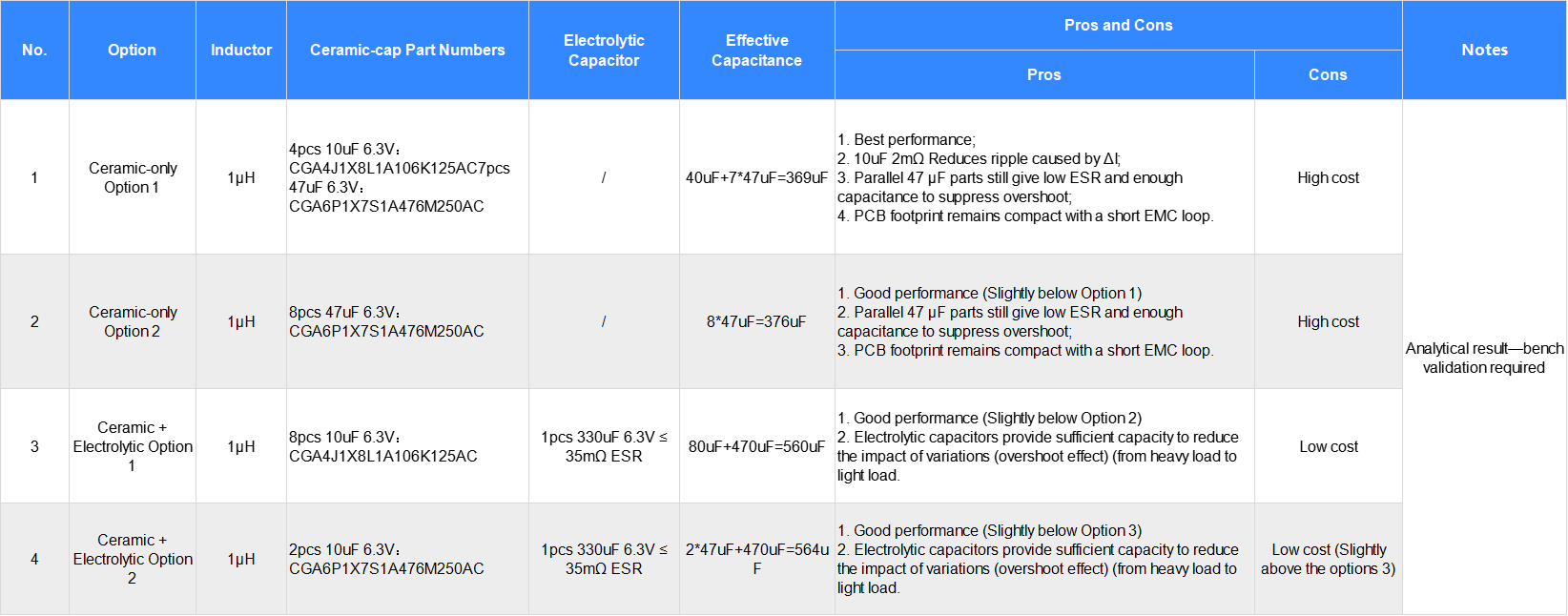
Jadual 16: Reka bentuk kapasitor penapis output bekalan kuasa penyelekoh
4.3 Pengiraan Kapasitan Input Bekalan Kuasa LM25149
4.3.1 Pengiraan Kapasitans Masukan

Jadual 17: Pengiraan Filer Masukan Bekalan Kuasa Pensuisan
Jadual 18: Pemilihan Filer Keluaran Bekalan Kuasa Pensuisan
4.4 Pengiraan Pemilihan Mosfet LM25149
4.4.1 Pengiraan Mosfet
Lembaran data LM25149 tidak mempunyai terlalu banyak pengiraan dan pengiraan pemilihan, pengiraan QG serta pemilihannya berdasarkan anggaran empirikal secara songsang. Keputusan pengiraan memilih Vgs 4.5-5.0V, ≤ 22nC. Proses pengiraan merujuk kepada jadual berikut, memilih paras Miller pada 2-3V (boleh juga menggunakan hampir 3V), Rdson dipilih sebagai ≤ 8mΩ.
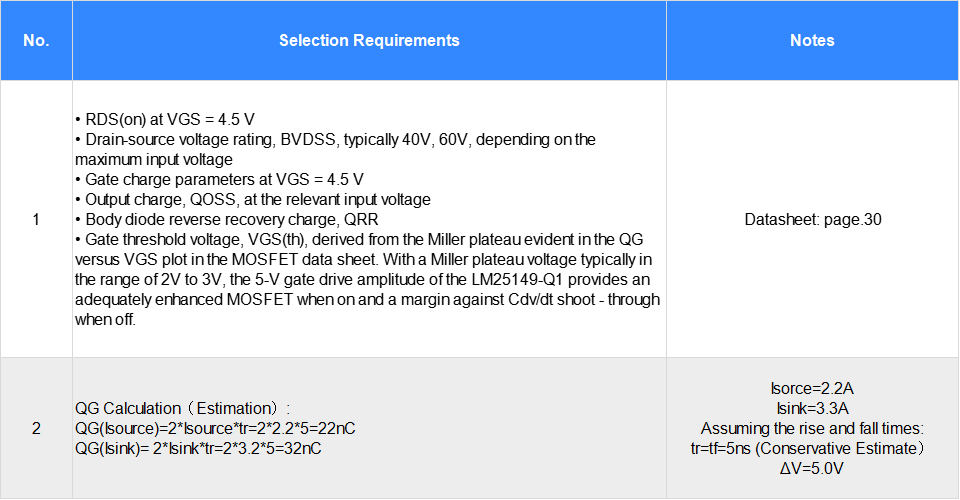
Jadual 19: Pemilihan dan Pengiraan Mosfet
4.5 Cadangan Pemilihan Mosfet
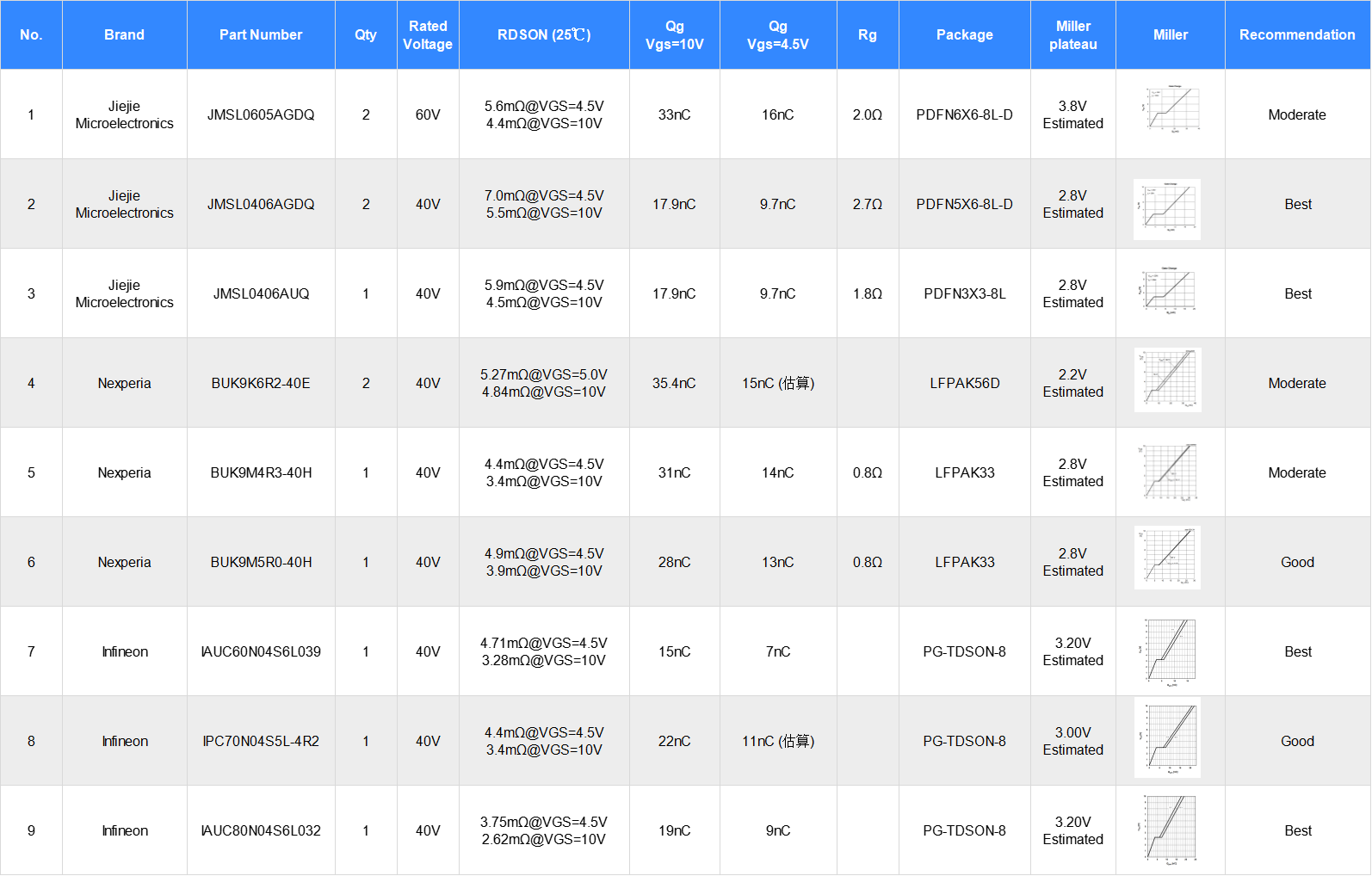
Jadual 20: Model Pemilihan Mosfet
4.6 Pengiraan FB dan Pembaikan LM25149
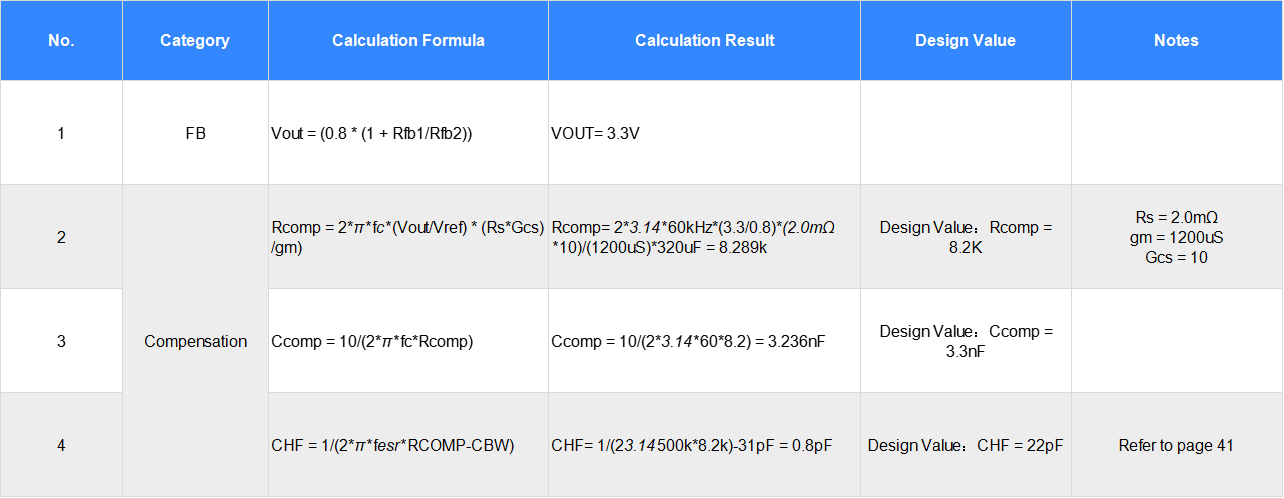
Jadual 21: Pengiraan FB dan kompensasi
4.7 Pengiraan reka bentuk EMC LM25149
Tanpa dianalisis secara berlebihan, sila rujuk spesifikasi.
5- Ringkasan Reka Bentuk
5.1 Ringkasan pemilihan reka bentuk bekalan kuasa LM25149BUCK
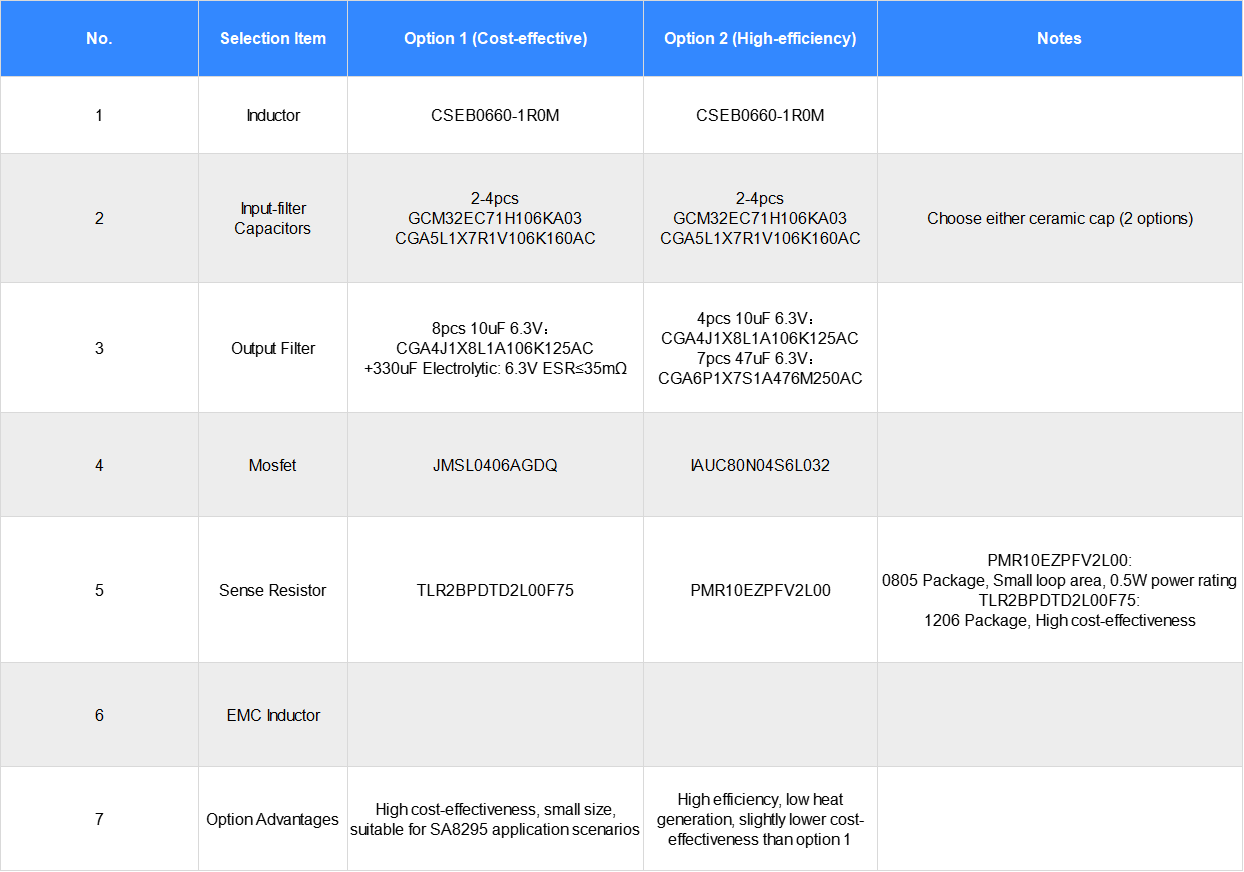
Jadual 22: Reka Bentuk dan Pemilihan
5.2 Ringkasan Program
Kesan ke atas prestasi dan kecekapan bekalan kuasa suis berkembar disebabkan oleh pelbagai faktor, prestasi dan penunjuk perlu mengambil kira faktor sebenar. Bab ini digunakan untuk pengiraan teori, panduan teori untuk reka bentuk sebenar. Prestasi dan penunjuk reka bentuk mempunyai hubungan rapat dengan komponen-komponen prestasi, keadaan penggunaan, susun atur dan lain-lain, maka ujian dan pengesahan yang teliti adalah diperlukan.
Reka bentuk bekalan kuasa penurun segerak untuk pengawal domain laluan tinggi merupakan bidang teknologi reka bentuk pengawal yang sukar, perlu menyeimbangkan prestasi, isipadu, kos. Kodak Ka memberi tumpuan kepada penyelidikan dan reka bentuk induktor secara bebas, CSEB0660-1R0M sesuai untuk pembangunan dan aplikasi platform laluan tinggi, mempunyai keberkesanan kos yang tinggi, rintangan kuat terhadap arus serapan, haba kecil serta kelebihan teknikal yang lain, dengan nisbah kuasa kepada isipadu yang terkemuka dalam industri; Kodak Ka memberi tumpuan kepada penyelidikan dan pembangunan teknologi, inovasi teknologi, membangunkan produk unggul untuk industri induktor, membantu pembangunan dan aplikasi produk elektronik.