

Permintaan yang semakin meningkat terhadap automasi dalam industri pembuatan dan perkhidmatan sedang mendorong perkembangan pesat robot humanoid. Dengan peningkatan darjah kebebasan (DOF) dan penambahbaikan kelajuan tindak balas terhadap persekitaran, robot humanoid telah menjadi lebih canggih, membolehkannya mensimulasikan pergerakan manusia dengan lebih realistik. Darjah kebebasan yang lebih tinggi bermaksud robot humanoid memerlukan lebih banyak pemacu motor, dan induktor memainkan peranan penting dalam sistem kawalan motor, pengurusan kuasa, dan pemprosesan isyarat robot humanoid.

1- Aplikasi utama induktor dalam robot humanoid
Induktor terutamanya digunakan dalam robot humanoid untuk pemacuan motor, pengurusan kuasa dan pemprosesan isyarat.
Pemacuan motor: Robot humanoid berkualiti tinggi di pasaran biasanya mempunyai 40-50 motor bersendi, yang menentukan kebebasan dan fleksibiliti robot tersebut. Induktor memandu motor berputar dengan lancar melalui penyimpanan tenaga dan arus yang rata, membantu sistem kawalan motor robot humanoid mencapai pergerakan sendi, pelarasan sikap dan keseimbangan dinamik. Pemandu motor dan beban berkuasa tinggi memerlukan induktor dengan ciri arus saturasi tinggi dan kapasiti pengaliran arus yang tinggi untuk menghadapi fluktuasi arus seketika. Pada masa yang sama, adalah perlu untuk mengurangkan kehilangan bagi meningkatkan kecekapan sistem dan memperpanjang jangka hayat bateri.
Pengurusan kuasa: Induktor adalah komponen utama dalam penukar DC-DC (seperti litar pengurang dan penguat) dalam sistem pengurusan kuasa, menyediakan bekalan kuasa yang stabil pada voltan yang berbeza untuk pemproses AI, sensor, modul komunikasi dan lain-lain, mengoptimumkan pengagihan dan kecekapan penukaran tenaga. Induktor perlu mempunyai rintangan arus terus (DCR) yang rendah, kecekapan penukaran yang tinggi untuk mengurangkan kehilangan kuasa, arus saturasi yang tinggi dan kestabilan suhu yang baik.
Pemprosesan isyarat: Dalam sistem pemprosesan isyarat, induktor terutamanya digunakan untuk menekan hingar frekuensi tinggi dan EMI, memastikan keutuhan isyarat. Sebagai contoh, dalam sistem persepsi, ia membantu merealisasikan persepsi dan maklum balas interaktif robot berasaskan manusia terhadap persekitaran luar. Dalam sistem komunikasi dan kawalan, induktor menggunakan rekabentuk EMI untuk memastikan keupayaan anti-gangguan modul radar, kamera, komunikasi wayarles dan lain-lain, serta meningkatkan kestabilan operasi peralatan.
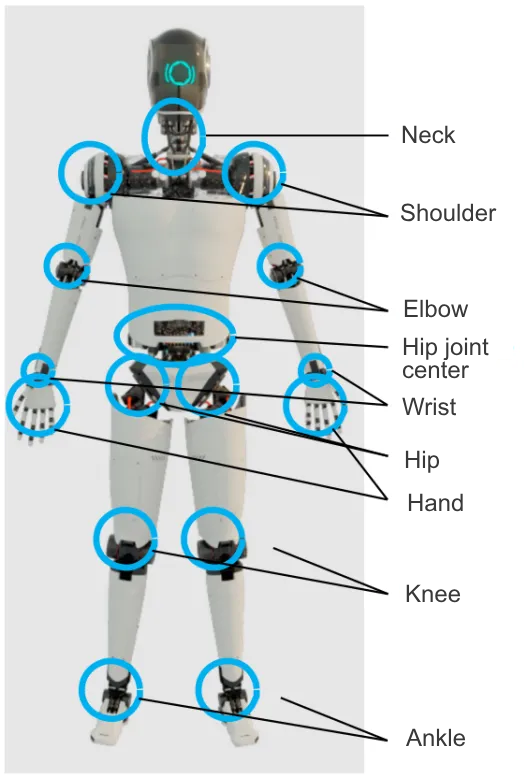
Rajah 1: Lokasi utama motor bersama robot humanoid (imej daripada TI)
2- Permintaan terhadap induktor untuk robot humanoid
Sistem elektronik robot humanoid adalah kompleks, dan untuk mencapai kawalan pergerakan yang tepat serta komunikasi yang boleh dipercayai, ia tidak dapat dipisahkan daripada sokongan komponen asas seperti induktor. Ciri teknikal robot humanoid juga menentukan keperluan tinggi mereka terhadap prestasi dan rekabentuk struktur produk induktor. Keperluan tersebut terutamanya adalah seperti berikut:
2.1 Pemikroan dan ketumpatan kuasa yang tinggi
Ruang dalaman robot humanoid sangat padat, mengintegrasikan sejumlah besar motor, unit pengkomputeran (CPU/GPU), sensor, dan sebagainya, dan papan litar bekalan kuasa (seperti POL, penukar titik-beban) mesti diperkecilkan saiznya. Diperlukan induktor yang kecil dan ringan supaya sesuai dengan rekabentuk struktur yang padat, sambil juga mempunyai ketumpatan kuasa yang tinggi untuk mencapai pengendalian kuasa tinggi dalam ruang yang kecil. Induktor dengan binaan bercetak atau berperisai mampu menahan arus saturasi dan arus kenaikan suhu yang sangat besar dalam saiz fizikal yang kecil, yang merupakan keperluan penting untuk mencapai output kuasa tinggi dalam ruang terhad.
2.2 Prestasi anti-gangguan elektromagnetik yang kuat
Persekitaran elektromagnet dalaman robot adalah kompleks, dengan litar digital berkelajuan tinggi, hingar pensuisan kuat daripada pemandu motor, dan sensor sensitif (seperti IMU dan kamera). Penggunaan induktor tanpa perisai akan menjana medan magnet yang kuat dan menjadi sumber gangguan elektromagnet, yang akan memberi kesan buruk terhadap kestabilan bacaan sensor dan sistem kawalan. Induktor berperisai mempunyai kebocoran magnet yang minima, secara berkesan mengurangkan gangguan elektromagnet dan memastikan operasi komponen lain dalam sistem adalah boleh dipercayai. Oleh itu, induktor bercetak, induktor kuasa arus tinggi, dan induktor kuasa lain dengan struktur perisai magnet adalah pilihan yang lebih ideal.
2.3 Arus tepu tinggi
Beban dinamik robot berubah secara drastik, seperti apabila bermula secara tiba-tiba, berjalan, atau mengangkat objek berat, arus motor dan unit pengkomputeran akan melonjak serta-merta. Induktor mesti mampu mengelakkan kejenuhan magnet pada arus tinggi (iaitu, nilai induktans tidak menurun dengan mendadak), jika tidak, gelung kuasa akan hilang kawalan, menyebabkan voltan sistem runtuh dan mula semula. Oleh itu, induktans perlu mempunyai ciri "kejenuhan lembut", iaitu apabila hampir mencapai arus jenuh, nilai induktans berkurang secara perlahan, bukannya merosot secara mendadak. Ini memberikan penampan kepada sistem kawalan kuasa dan meningkatkan kebolehpercayaan sistem.
2.4 Prestasi anti-goncangan dan impak yang kuat
Robot humanoid bergerak kerap, mengalami banyak getaran mekanikal, dan perlu mempunyai galangan yang tahan getaran dan hentakan, sambungan soldernya perlu kukuh, serta perumahan dan gegelung dalaman mampu menahan tekanan mekanikal. Galangan berstruktur acuan mengeras sepenuhnya gegelung di dalam bahan magnetik, yang mempunyai kekuatan mekanikal yang sangat tinggi serta rintangan hentakan yang sangat kuat, maka ia banyak digunakan dalam sistem robot humanoid.
2.5 Menyesuaikan diri dengan persekitaran frekuensi tinggi dan suhu tinggi
Galangan perlu mempunyai ciri-ciri frekuensi tinggi yang baik, mampu menekan gangguan frekuensi tinggi secara berkesan, mengurangkan riak dan hingar, serta mengekalkan kehilangan tenaga yang rendah pada frekuensi tinggi untuk meningkatkan kecekapan penukaran.
Selain itu, induktor harus mampu mengekalkan nilai kearuhan secara stabil dalam persekitaran suhu tinggi, nilai Q berkurang dengan kecil, dan prestasi sukar merosot, bagi memastikan prestasi kearuhan pada robot adalah boleh dipercayai dalam kerja jangka panjang.
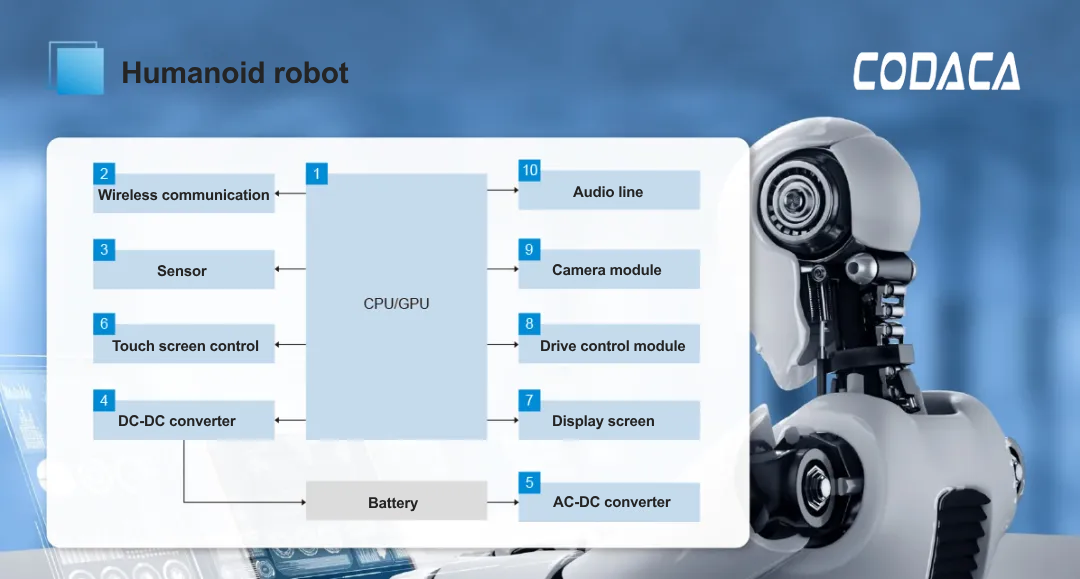
Rajah 2 Aplikasi induktor dalam robot humanoid
3- Codaca penyelesaian induktor untuk robot humanoid
Dalam aplikasi seperti robot humanoid, yang menggabungkan ketumpatan kuasa tinggi, kecekapan tinggi, kebolehpercayaan tinggi, persekitaran EMI kompleks, dan keadaan mekanikal yang mencabar, induktor teras serbuk aloi berperisai berarus tinggi telah menjadi pilihan arus perdana yang tidak dapat dinafikan dalam litar bekalan kuasa, terutamanya bekalan kuasa POL untuk unit pengiraian utama dan pemandu motor sendi, berkat kelebihan prestasi menyeluruhnya. Rekabentuknya menyeimbangkan dengan sempurna tiga cabaran utama iaitu prestasi, saiz, dan kebolehpercayaan.
Melalui penyelidikan dan pembangunan bebas serta inovasi teknologi, Codaca menyediakan penyelesaian induktor adaptif untuk robot humanoid, dan syarikat ini telah melancarkan pelbagai kategori dan model produk seperti induktor kuasa arus tinggi berstruktur perisai magnetik, induktor bercetak nipis dan ringan, serta galangan mod sepunya. Ia boleh menyediakan ciri-ciri elektrik yang berbeza bagi memenuhi keperluan prestasi tinggi induktor dalam pelbagai senario robot humanoid, dan digunakan secara meluas dalam modul komunikasi dan navigasi robot, modul kuasa, modul pemandu motor, papan kawalan robot serta modul-modul lain.
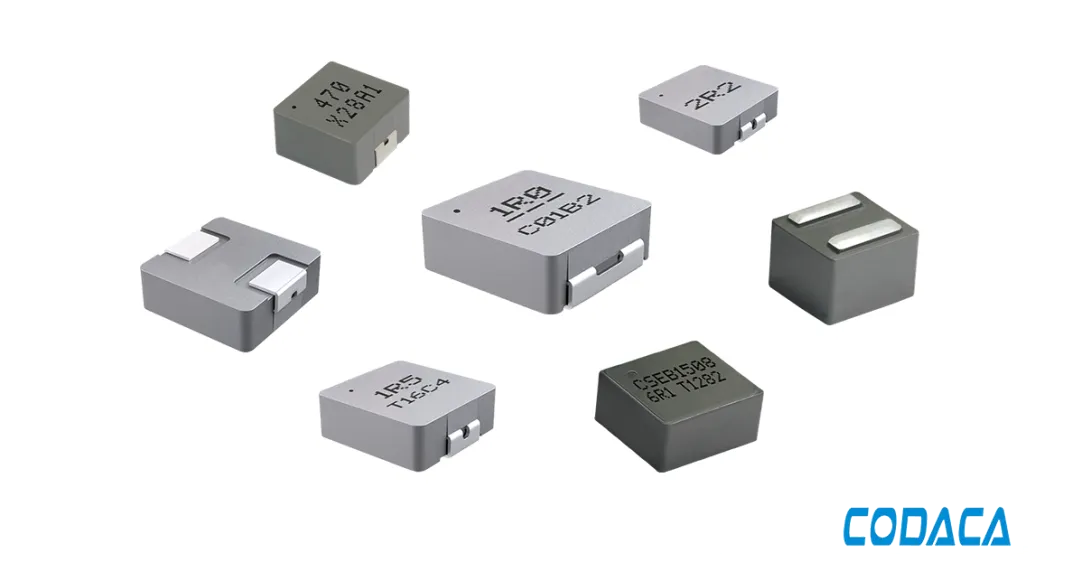
3.1 Induktor kuasa arus tinggi padat
Induktor kuasa arus tinggi padat terutamanya digunakan dalam modul DC-DC pada sistem pemacu motor dan pengurusan kuasa robot humanoid. Induktor arus tinggi menggunakan bahan teras serbuk magnet logam rendah kehilangan yang dibangunkan secara bebas oleh Codaca, yang mempunyai ciri-ciri arus saturasi tinggi, kehilangan rendah, kecekapan penukaran tinggi, dan suhu operasi tinggi untuk memastikan prestasi dan ketahanan robot humanoid. Arus induktor tinggi boleh mencapai sehingga 422A dan suhu operasi boleh mencapai sehingga 170°C. Pada masa yang sama, produk ini menggunakan struktur perisai magnetik, yang mempunyai prestasi anti-gangguan elektromagnetik yang kuat. Ia sepenuhnya memenuhi keperluan robot humanoid dari segi arus saturasi tinggi, suhu operasi tinggi dan gangguan elektromagnetik rendah.
Model Cadangan: CSBX , CSBA , CSCM , CSUT , CSCIL , dll.

3.2 Induktor bercetak nipis dan ringan
Induktor berbentuk kebanyakan digunakan dalam modul paparan robot humanoid, modul kawalan skrin sentuh, modul DC-DC, dan lain-lain. Lilitan kuasa acuan menggunakan serbuk aloi berkurang kehilangan yang dibangunkan secara bebas oleh CODACA, yang mempunyai kehilangan rendah, kecekapan tinggi, frekuensi aplikasi yang luas, dan mampu mengurangkan bunyi bising kepada tahap ultra-rendah. Ia menggunakan rekabentuk nipis dan ringan (saiz minimum 2mm), menjimatkan ruang PCB, sesuai untuk pemasangan berketumpatan tinggi, serta mempunyai rintangan yang kuat terhadap hentakan mekanikal dan getaran (rintangan getaran melebihi 10G), memenuhi keperluan robot humanoid terhadap ketumpatan kuasa tinggi dan kestabilan tinggi.
Model Cadangan: CSAG , CSAC , CSAB , CSEB , CSHB , dll.
3.3 SMD power inductor
Codaca SMD power inductors kebanyakan digunakan dalam modul kamera, modul audio, modul DC-DC, dan lain-lain, yang mampu memenuhi keperluan saiz penebat kecil, arus besar, kecekapan penukaran tinggi, dan sebagainya.
Model Cadangan: SPRHS , CSUS , CRHSM , VCRHS , SPQ , dll.

Sebagai pembekal terkemuka dalam bidang teknologi komponen magnetik, Codaca Electronics telah memberi tumpuan kepada pembangunan induktor selama 24 tahun, dan jurutera boleh memadankan nilai lebaran, arus terkadar, frekuensi pensuisan, saiz produk, dan sebagainya mengikut keperluan prestasi khusus setiap subsistem robot humanoid untuk induktor. Sila hubungi kakitangan jualan Codaca untuk maklumat yang lebih terperinci.