
Snelle links

De snelle ontwikkeling van de industrie voor nieuwe energievoertuigen heeft geleid tot een explosieve groei van diverse industriële ketens, en autonome intelligentie en rijden op eigen kracht zijn uitgegroeid tot de belangrijkste kerncompetitieve richting van nieuwe energievoertuigen. Dit brengt nieuwe uitdagingen en kansen met zich mee voor de sterk geïntegreerde centrale 'brein' en domeincontroller, met name wat betreft de betrouwbaarheid, hoge vermogensdichtheid, EMC, hoge efficiëntie en kosten-effectiviteit van DC-DC-schakelvoedingen.
Als leverancier van intelligente cockpit domeincontrollers nemen SA8155 en SA8295 een belangrijke positie in, en de tegenstelling tussen transiënte stroom, stabiele bedrijfsstroom, stand-by-efficiëntie, kosten en EMC-ontwerp van schakelende voedingen voor de primaire stroomvoorziening van de centrale domeincontroller SOC (stroomvoorziening omgezet van de primaire accu-ingang) is uitgegroeid tot een grote uitdaging voor het ontwerp van BUCK-voedingen. Het oplossen en in balans brengen van deze tegenstellingen vormt de technische richting waarin fabrikanten van schakelende voedingarchitecturen, voedingschips, spoelen, MOSFETs en condensatoren samenwerken.
Dit artikel bespreekt het ontwerp van een DC-DC-schakelende voeding voor de primaire voeding van centrale domeinbesturing met grote dynamische schakelvermogens (100-300%), inclusief voedingsschema, keuze van spoel en condensator en andere ontwerpmethoden, rekening houdend met uitdagingen op het gebied van afmetingen, kosten, efficiëntie en prestaties.
In dit hoofdstuk wordt als voorbeeld de Qualcomm SA8295-domeincontroller gebruikt om het praktische ontwerp van de primaire BUCK-schakelvoeding te bespreken en uit te werken.
Voor dit hoofdstuk is kennis vereist van de eerste serie (gedetailleerde theorie en berekening van BUCK-schakelvoeding) en wordt de BUCK-voeding gedetailleerd ontworpen op basis van de LM25149.
Deze artikelserie bestaat uit drie delen (met voortdurende updates):
02-Decoderen van het ontwerp van de primaire voeding voor de Qualcomm Automotive Domeincontroller: schemaontwerp en PCB-ontwerp (dit hoofdstuk)
1- Ontwerpdoelen en uitdagingen
5.1 SA8295 Transiënte stroomvereisten

Tabel 1: Vereisten voor het stroomvoorzieningsontwerp van SA8295
Opmerking: De nieuwste ontwerpvereisten voor SA8295 zijn 21A (1 NPU) en 24A (2 NPUs), en dit ontwerp kan (30A stroombeveiliging bij overbelasting) dekken
1.2 Ontwerpdoelstellingen
Dit ontwerp maakt gebruik van een LM25149 ontwerpdomeincontroller eerste trap voeding , die voldoet aan de eisen voor een transiënte stroom van 24A (100μs) en voldoet aan de werkeisen voor stationair bedrijf van meer dan 10A, om zo een uitgebalanceerde verhouding te bereiken tussen volume, kosten en prestaties.
Opmerking: Transiënte stroom veroorzaakt geen opwarming (voor Qualcomm SA8295 slechts 100μs transiënte stroom); stationaire hoge stroom veroorzaakt een temperatuurstijging, waarvan het effect gemeten moet worden (het ontwerp wordt geselecteerd op basis van de daadwerkelijke omgevingsomstandigheden).
2- Schematisch ontwerp en PCB-ontwerp
2.1 Selectie van kerncomponenten
De criteria voor de selectie van primaire schakelvoedingscomponenten voor domeincontrollers: prestaties eerst, rekening houdend met kosten en verkleining van het PCB-oppervlak; rekening houdend met het EMC-probleem en het stroomlusprobleem van een BUCK-schakelvoeding, voldoet aan de algemene theorie en regels voor BUCK-schakelvoedingontwerp, en de algemene ontwerpmethode kan als richtlijn worden gebruikt.
Zie hoofdstuk 1 voor details over de selectie en berekening van elektronische componenten ( Decoderen van het ontwerp van de voeding in eerste fase voor Qualcomm Automotive Domain Controller: Ontwerp en berekening van de voeding )
Optie 2 voor dit ontwerp (met acht keramische condensatoren van 47uF in C1210-behuizing). Het ontwerp is niet beperkt tot deze keuze, en het productontwerp kan worden aangepast op basis van de praktijksituatie, en optimalisatie kan plaatsvinden op basis van daadwerkelijke testresultaten.
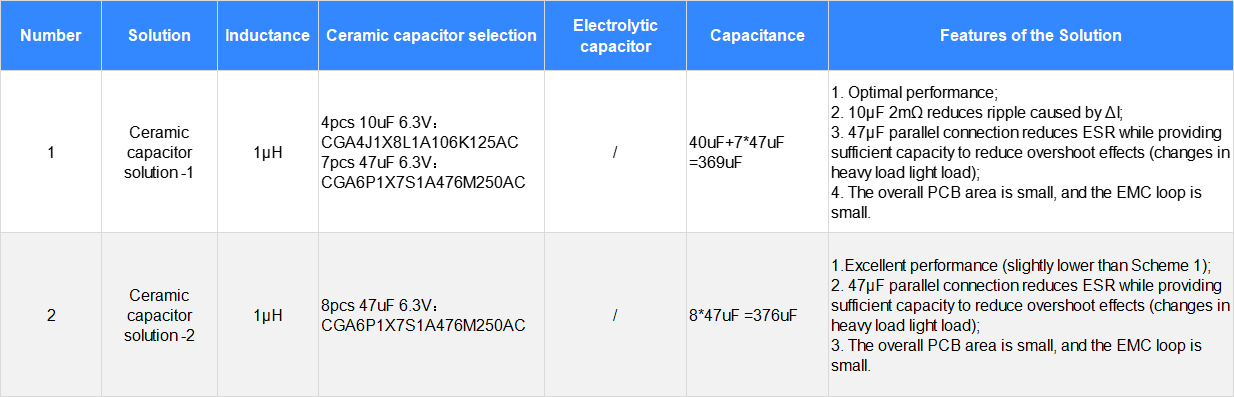
Tabel 2: BUCK-voeding - ontwerpvarianten
2.1.1 BUCK-voeding - MOSFET-selectie

Tabel 3: BUCK-voeding - MOSFET-selectie
2.1.2 BUCK-voeding - keuze van de spoel
Voor de keuze van de spoel wordt het model gebruikt: VSEB0660-1R0MV

Tabel 4: Spoelkeuze
2.1.3 Selectie van uitgangsfiltercondensator voor BUCK-voeding
Tabel 5: Selectie van uitgangsfiltercondensator voor BUCK-voeding
2.1.4 BUCK-voeding - selectie van ingangsfilterscondensatoren

Tabel 6: BUCK-voeding - selectie van ingangsfilterscondensator
2.2 Ontwerp van schema en PCB-design tools
2.2.1 Schema en PCB-ontwerp: JLC Technology EDA ( https://lceda.cn/)
Figuur 1 Inleiding tot Caritron EDA
JLC Technology EDA is het toonaangevende gratis EDA-ontwikkelhulpmiddel in China, met krachtige functies en hoge ontwikkelingsefficiëntie; dit ontwerp gebruikt JLC Technology EDA voor het ontwerpen van het schema en de PCB.
2.3 BUCK-voeding - schema-ontwerp
2.3.1 BUCK-voeding - schema-ontwerp
Het principeontwerp is gebaseerd op de specificatie van de LM25149-Q1 en de officiële ontwikkelbord, en het ontwerp voldoet aan de basistheorie van een BUCK-schakelvoeding en aan de ontwerpeisen voor de primaire voeding van high-pass domeincontrollers.
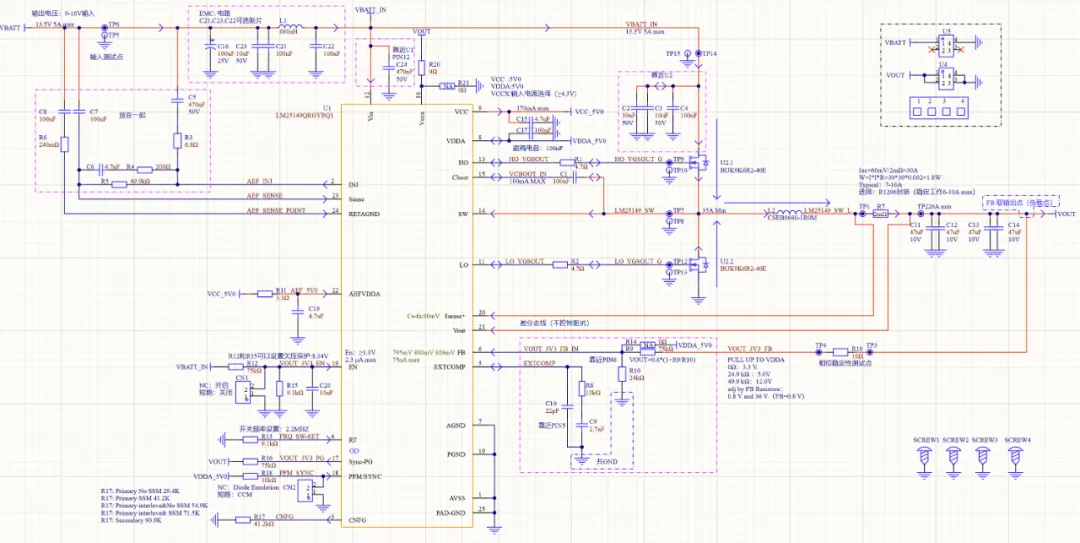
Figuur 2 Schematische weergave van LM25149
2.3.2 BUCK-voeding - sleuteltechnologie in schematisch ontwerp
Ingangs-EMC-circuit:
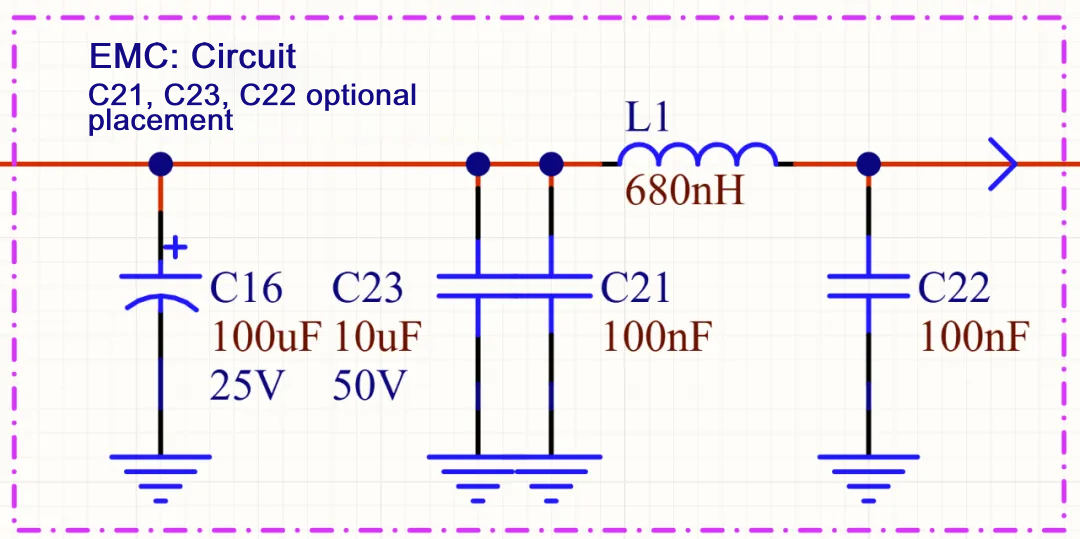
Technische punten:
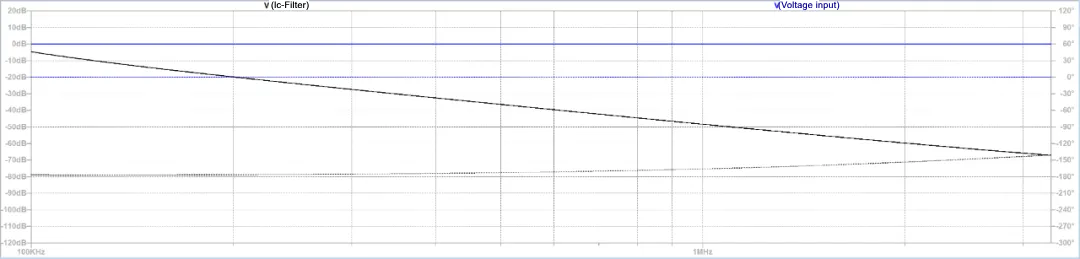
① De belangrijkste functie van L1 is het verminderen van de invloed van geleid en uitgestraald rumoer van de schakelende voeding op de ingangsspanning. De schakelfrequentie van de schakelende voeding is 2,2 MHz. L1 en C23 vormen een LC-filtercircuit (C16 is de elektrolytische condensator, voornamelijk voor lage frequenties onder 500 kHz), en verlagen 2,2 MHz met 60 dB.
② C21 vermindert schakelruis (ringing op de stijgende en dalende flank van de vermogensschakelaar), met name EMC-ruis in het bereik van 10-100 MHz.
③ Als C21 en C23 worden gebruikt in voedingen van eerste klasse (vóór bescherming), dient u het model met flexibele aansluiting te kiezen; als er sprake is van beveiliging, kunt u de automotive-grade condensator kiezen. Een vergelijkbaar beveiligingsmechanisme kan ook worden gerealiseerd met een serieschakeling van twee condensatoren.
Voor vermogen-MOSFETs en LM25149-ingangscapaciteiten, ontkoppelcondensatoren gelden dezelfde vereisten; dit ontwerp wordt niet gebruikt voor prestatieverificatie, gebruik van een enkele keramische condensator, en het productniveau-ontwerp voldoet aan de automotive-grade ontwerpeisen.
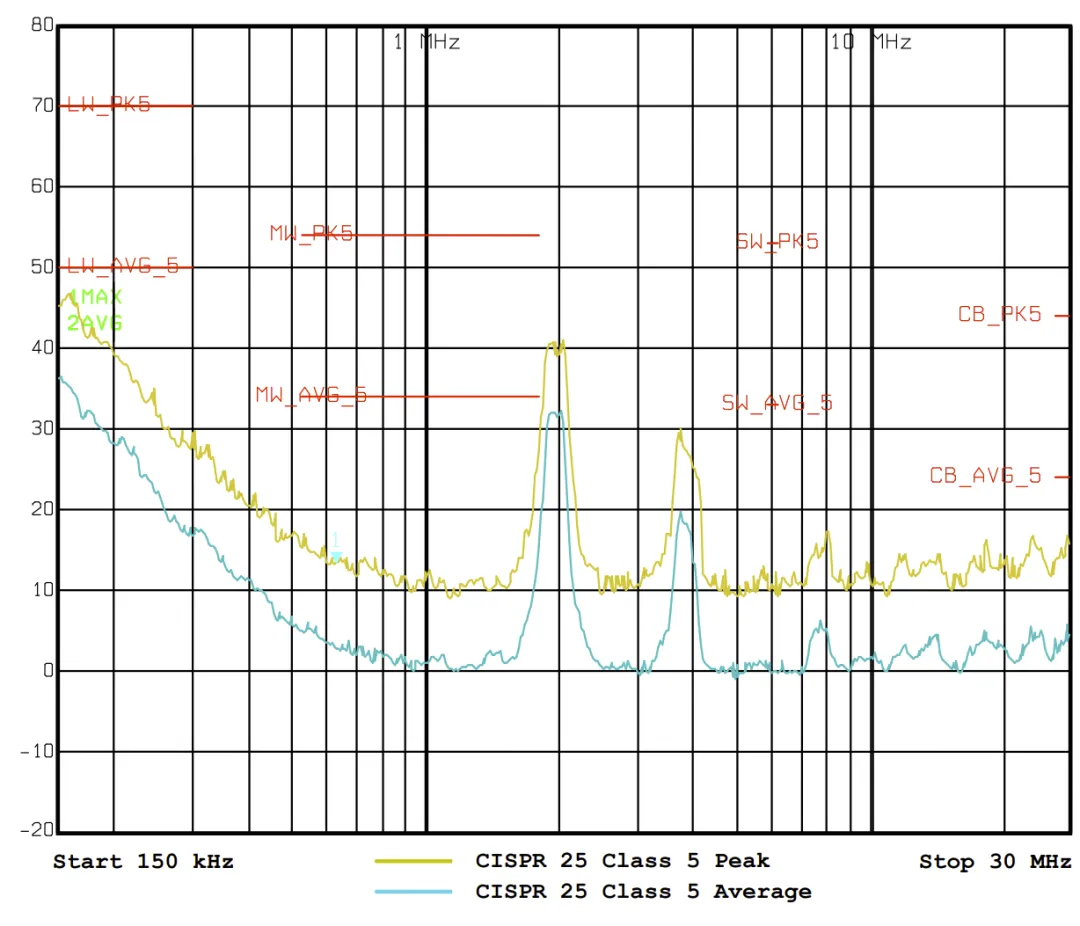
Opmerking: LM25419 actieve EMC-compensatie en dual random spread spectrum-technologie verlagen de EMC-amplitude slechts tot op zekere hoogte, en EMC kan niet volledig worden geëlimineerd; voor de schakelfrequentie van 2,2 MHz met betrekking tot energie, bij hoge stroom (≥10 A) blijft er bij toepassingen het risico bestaan op overschrijding van de norm, waarbij de daadwerkelijke afstelling leidend is; indien na verwijdering van C23 nog steeds geleide straling voldoet, kan de toepassing van C23 worden weggelaten en de kosten verlaagd.
BUCK vermogensingangscondensatoren:
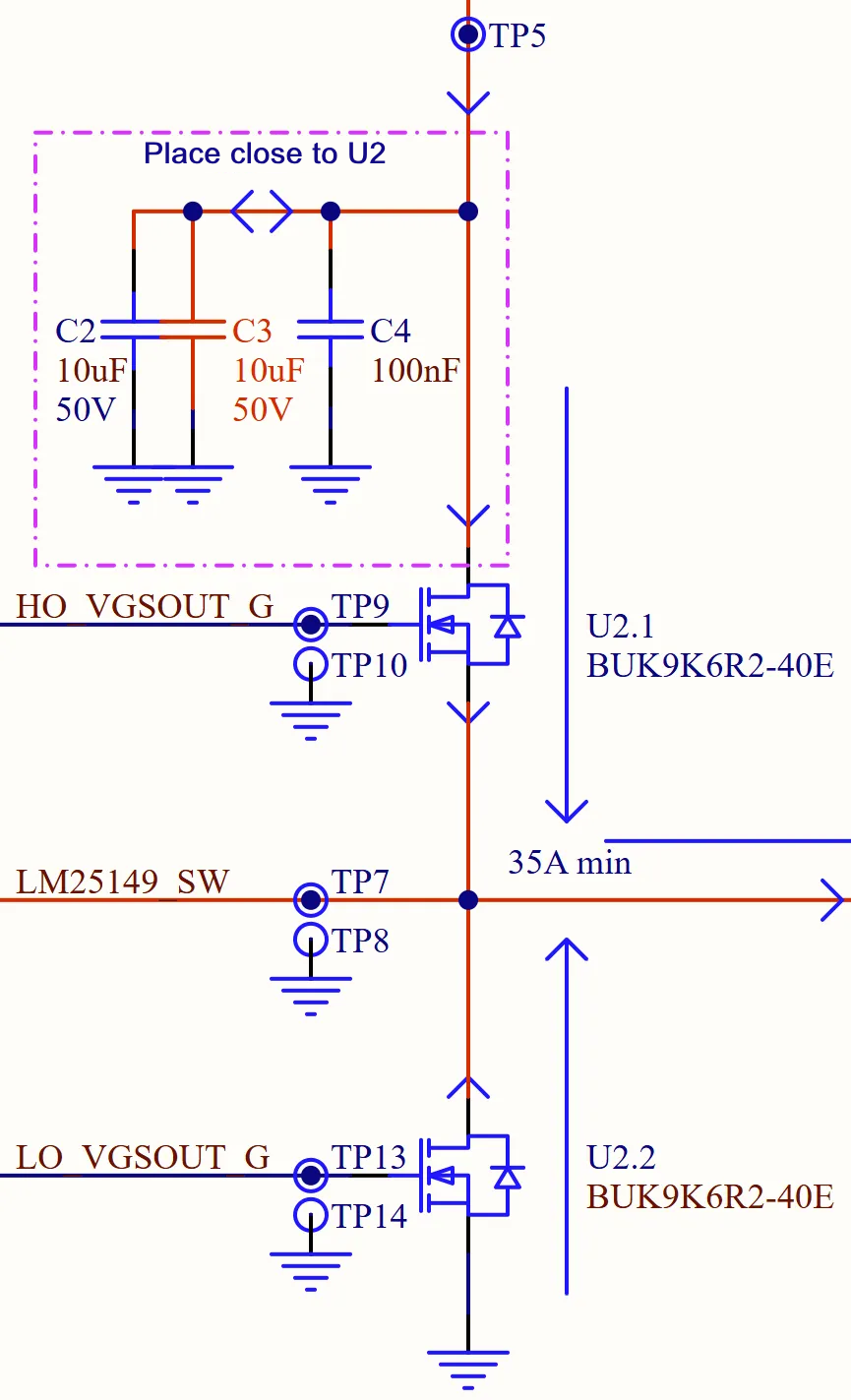
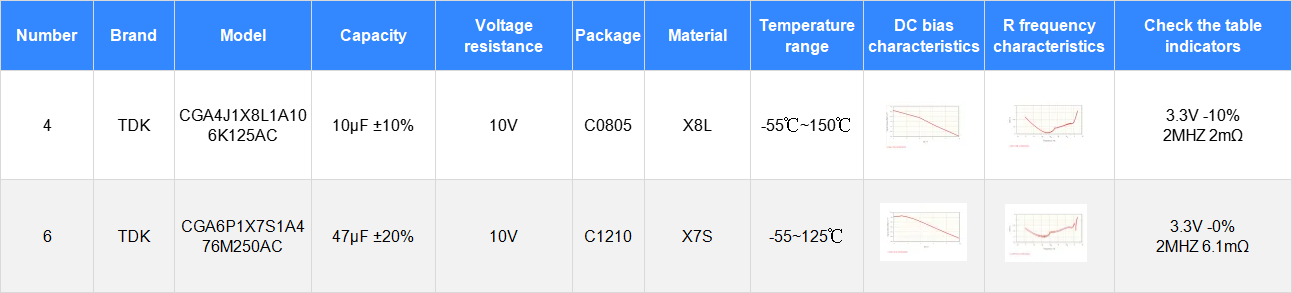
① C2, C3 zijn BUCK-voedingingangscapaciteiten, die cruciaal zijn voor de schakelvoeding EMC-prestaties. Voor 10 µF-capaciteiten kiest u een impedantie rond 2 MHz ≤5 mΩ. CGA4J1X8L1A106K125AC en CGA6P1X7S1A476M250AC hebben goede technische kengetallen als referentie. Bij de keuze van de capaciteit kunt u kiezen voor X7R, 35 V/50 V spanningsbestendigheid. De behuizingen C1210 en C1206 zijn beschikbaar. Voor dit ontwerp is de C1210-behuizing gekozen, wat een breed scala aan modelverificatieprestaties mogelijk maakt.
② C4 is een hoogfrequente schakel-EMC-condensator; kies 50 V X7R, C0402-behuizing.
C2, C3, C4: bij de layout moet aandacht worden besteed aan de stroomlus (zie de details in de layout). Voldoe aan de basisvereisten en ontwerptheorie voor BUCK-voedingingangscapaciteit. U kunt de theorie van de BUCK-schakelvoeding bestuderen om het begrip van de ingangscapaciteit te verdiepen.
③ TP7, TP9, TP13 worden gebruikt om de TG-, BG- en SW-signalen van de schakelaar te testen, en om de redelijkheid van de dead-zone tijd, ringingprestaties en de stijg- en daalrandprestaties van de MOSFET te testen, wat een belangrijke elektrische prestatie-index is van de schakelende voeding.
Het TP-testpunt van GND wordt gebruikt om de oscilloscoop GND-meetlus te verkleinen en de meetnauwkeurigheid te verbeteren, en bij de LAYOUT moet rekening worden gehouden met het plaatsen van het testpunt zo dicht mogelijk bij het relevante testsignaal.
MOSFET gatebesturingsweerstand:
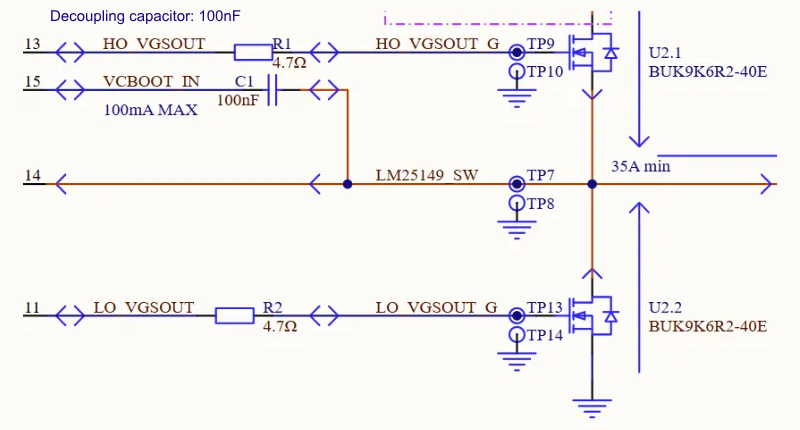
① R1 en R2 zijn de gate-aansturingsweerstanden van de MOSFET, die een belangrijke invloed hebben op de stijg- en daalranden van de vermogens-MOSFET.
② De keuze van R1 en R2 wordt beïnvloed door gecombineerde redenen van de gestuurde BUCK-voedingscontroller uitgangsstroom (controller (PULL- en PUSH-weerstand), gate-impendantie en laadeigenschappen van de power MOSFET (ingangscapaciteit CISS), en de totale weerstand van de gehele weerstand is in het beginontwerp ≤ 10 ohm gekozen, wat ook afhangt van de laadeigenschappen, en moet worden bijgesteld om de juiste weerstandswaarde te selecteren.
③ R1 en R2 zijn ook de belangrijkste parameters die het schakelgeruis EMC het meest beïnvloeden, en de kerncircuitfactoren die de schakelverliezen beïnvloeden.
Opmerking: 6 testpunten worden gebruikt om schakelkenmerken en doodtijd te testen.
Uitgangsvermogencircuit:
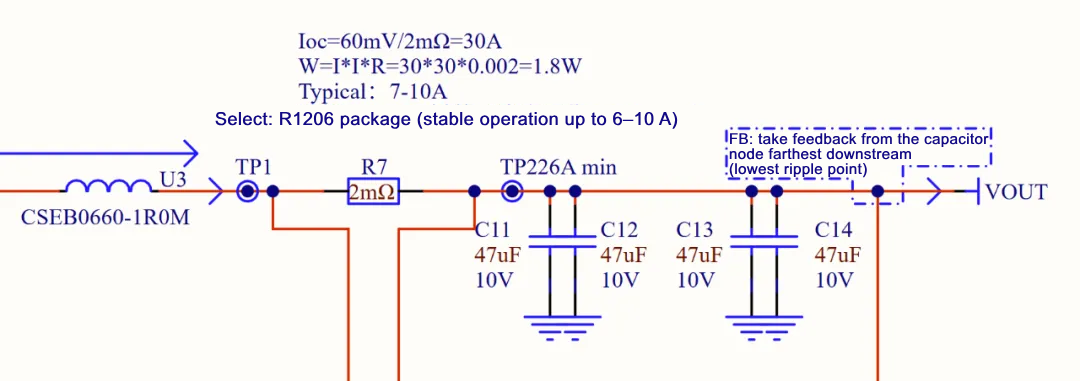
① Keuze van de spoel: Bij de keuze van de spoel worden voornamelijk twee factoren overwogen:
- Transiënte werkstroom: In staat om tijdelijk 24A uit te voeren (tijd: 100 μs);
- Stationaire werkstroom: 10A, stabiel werkend bij 10A stroom (geldig voor omgevingstemperaturen tot 85℃);
-De tijdelijke bedrijfsstroomduur is ≤ 100 μs en doet zich voor tijdens de opstartfase; alleen de conditie waarbij de inductantie niet verzadigd is, voldoet aan de eisen (behoud van de inductantiewaarde bij de stroom).
② Keuze van de meetweerstand: De meetweerstand is uitgevoerd in R1206-behuizing, met een warmteafvoer ≥ 0,5 W;
③ Keuze van de condensatoren: Zie: hoofdstuk over uitgangsfiltercondensator in het eerste deel van het hoofdstuk;
Terugkoppelcircuit:
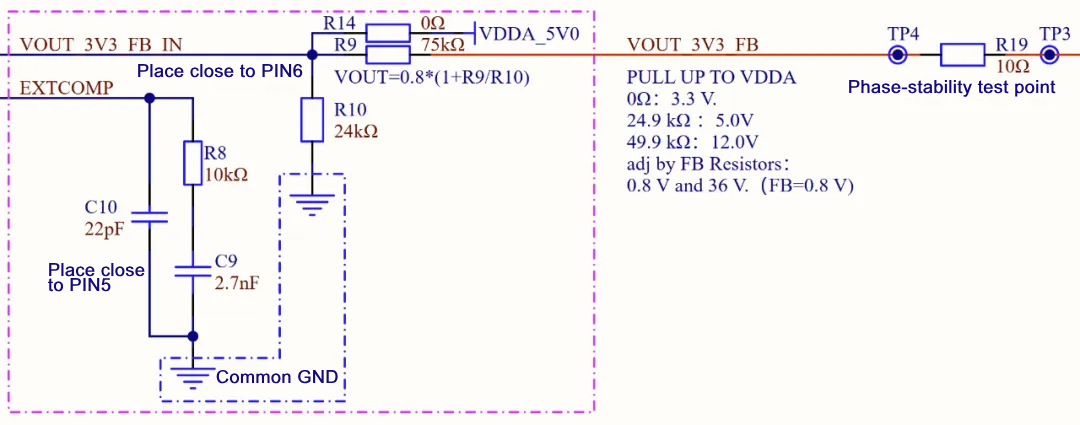
LM25149 heeft een vaste uitgangsconfiguratie en een feedback-uitgangsconfiguratie; zie voor nadere details het specificatieboek;
① R14l verbonden met VDDA, levert 3,3V;
② R14=24,9K, levert 5,0V;
③ R14=49,9K, levert 12,0V;
De uitgangsspanning wordt geconfigureerd met R14, R9 en R10 op de lege sticker;
R19 en gereserveerd TP3, TP4: voor testdoeleinden, fasemarge, doorkruisingsfrequentie, enz.
Opmerking: TP3 en TP4 worden gebruikt om fasemarge, doorkruisingsfrequentie, enz. te meten.
Functie-instellingen:
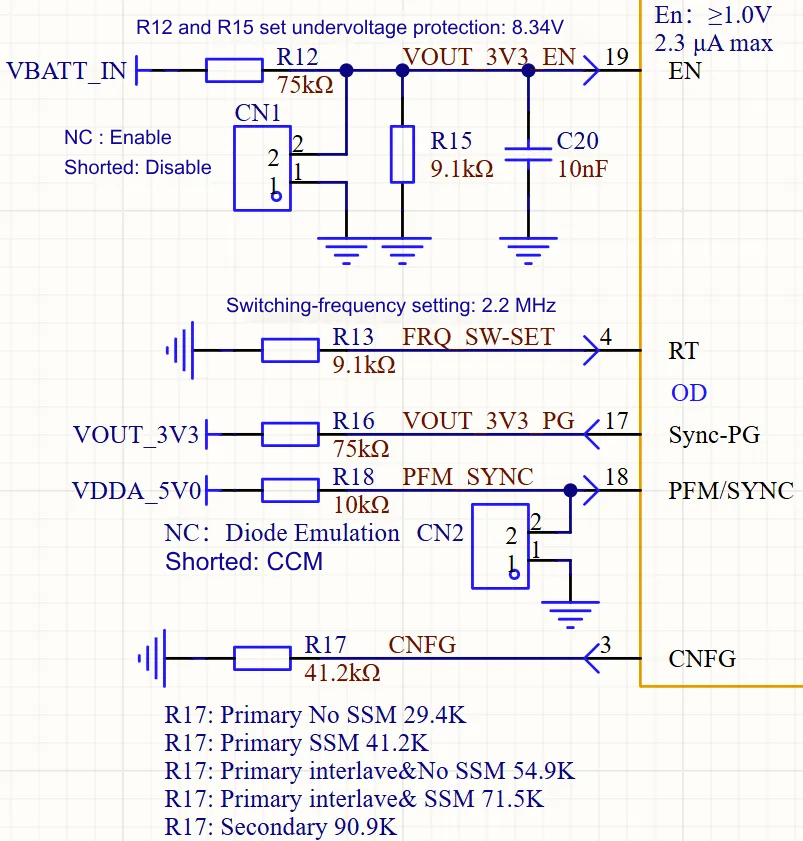
① EN: inschakelsignaal, schakelt de voeding in bij ≥ 1,0 V, kan worden beveiligd door nauwkeurige onderspanning;
② Sync-PG: Synchrone uitgang of Power Good; dit ontwerp is bedoeld voor Power Good;
③ PFM/SYNC
-Standaard (NC) jumper: Diode analoog, kleine stroomuitgang, kan met hoog rendement werken;
-Kortsluitjumper naar GND, geforceerde CCM-modus;
④ Chip-werkmodus instelling: in totaal 5 werkmodi (zie het specificatieboek).
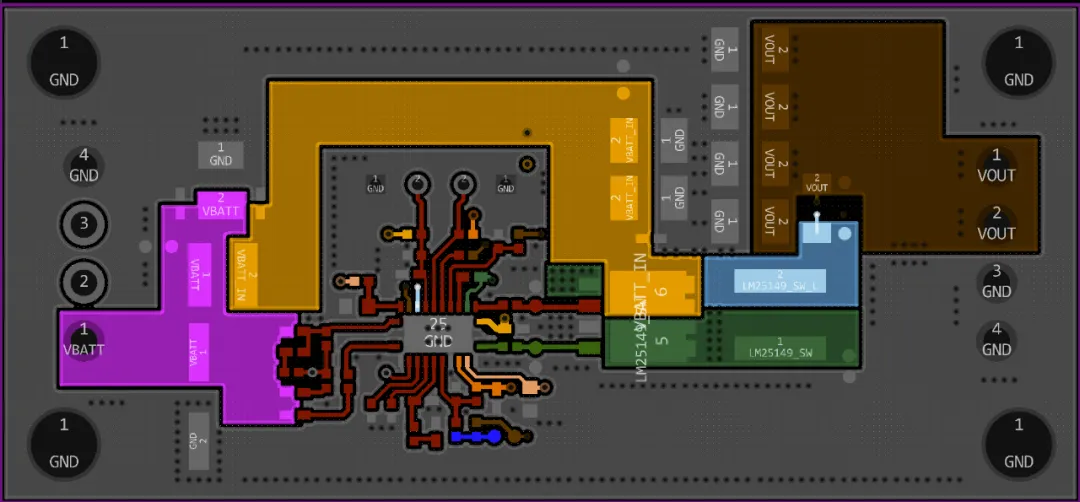
2.4 BUCK-voeding-PCB-ontwerp
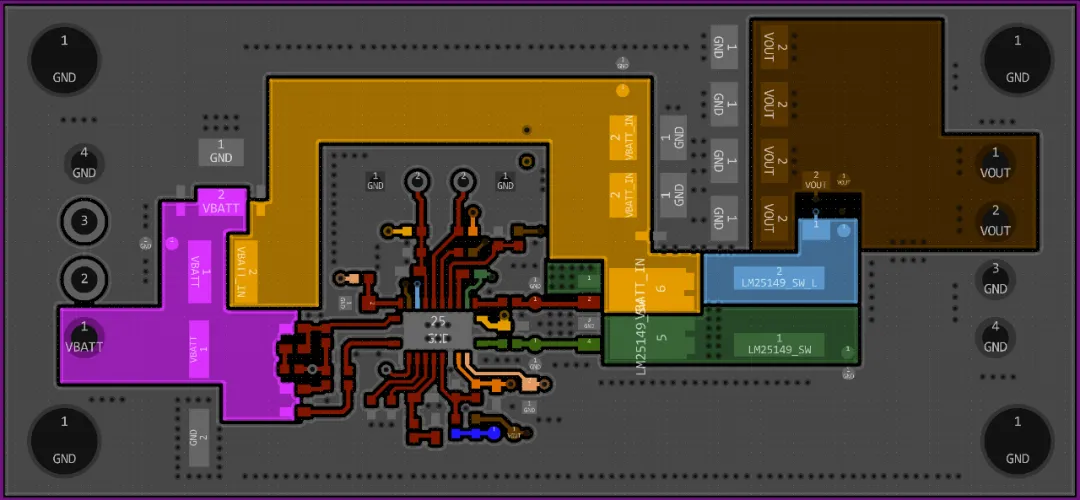
2.4.1 BUCK-voeding-PCB ontwerp
① -BOVENKANT
② -GND
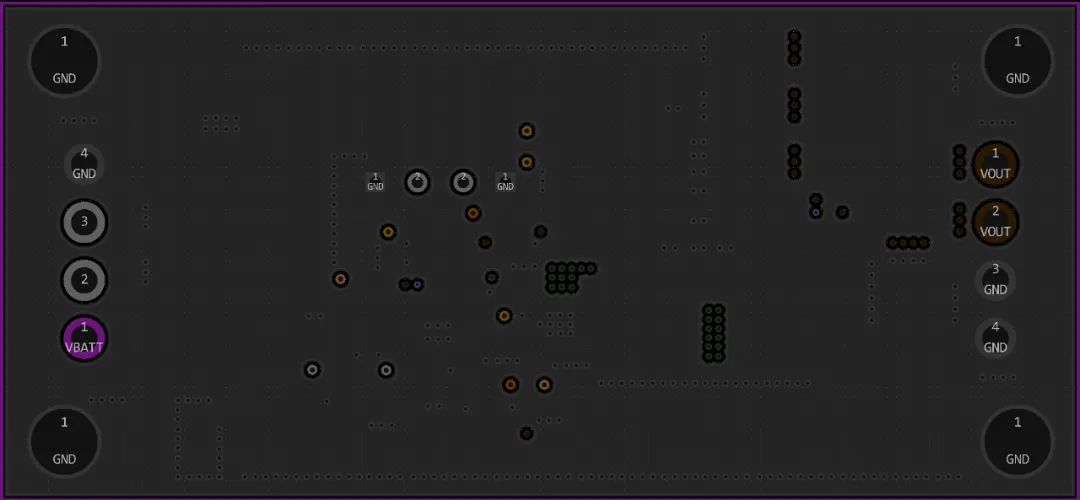
③ -Signaal
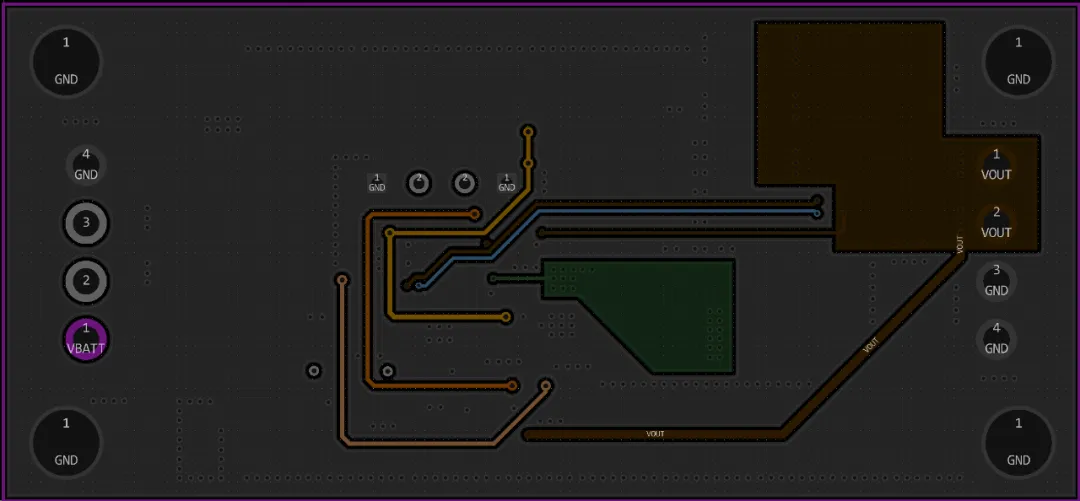
④ -Onderkant
2.4.2 BUCK-voeding - sleuteltechnologie voor PCB-ontwerp
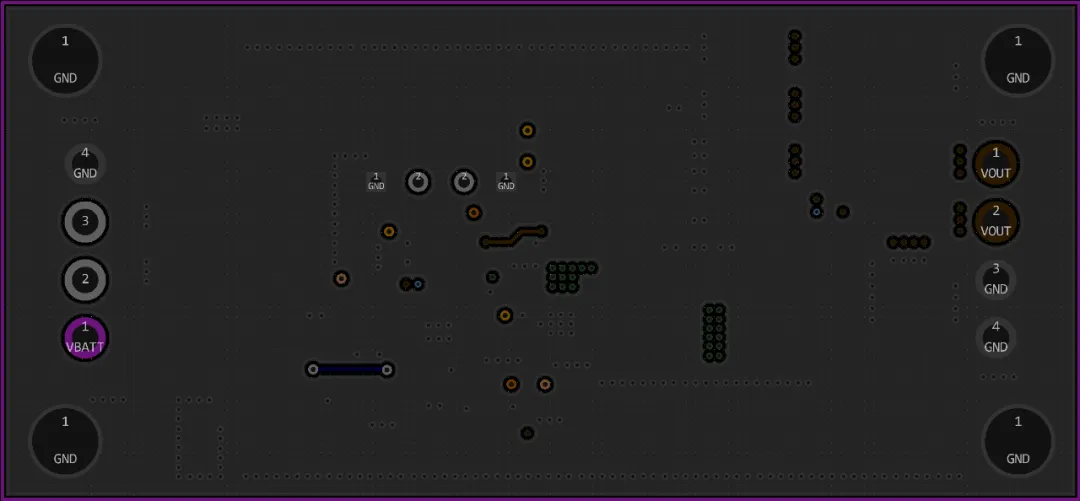
Ingangs- en uitgangscapacitor lussen:
① De ingangs- en uitgangscapacitoren van de BUCK-voeding moeten een minimale lus behouden, wat een belangrijke invloed heeft op EMC;
② C4 wordt voornamelijk gebruikt om het ringgeluid van de stijgende en dalende flanken van de schakelaar op te nemen;
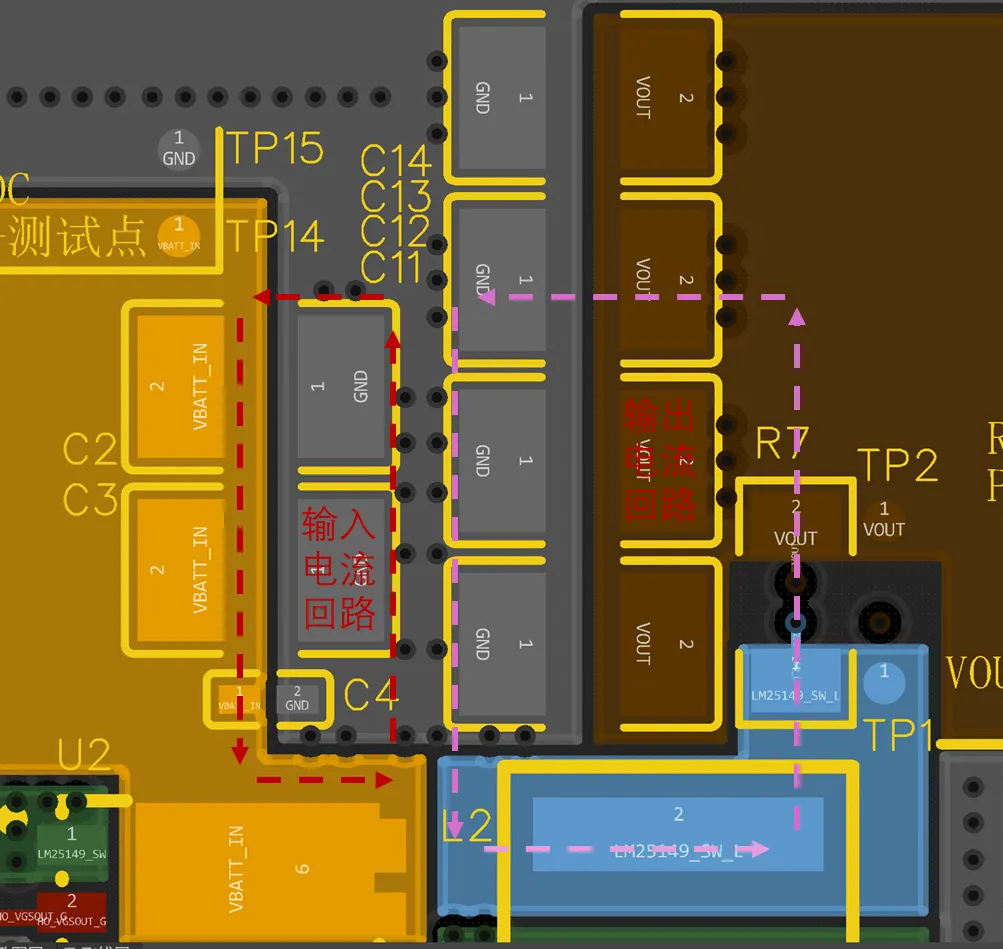
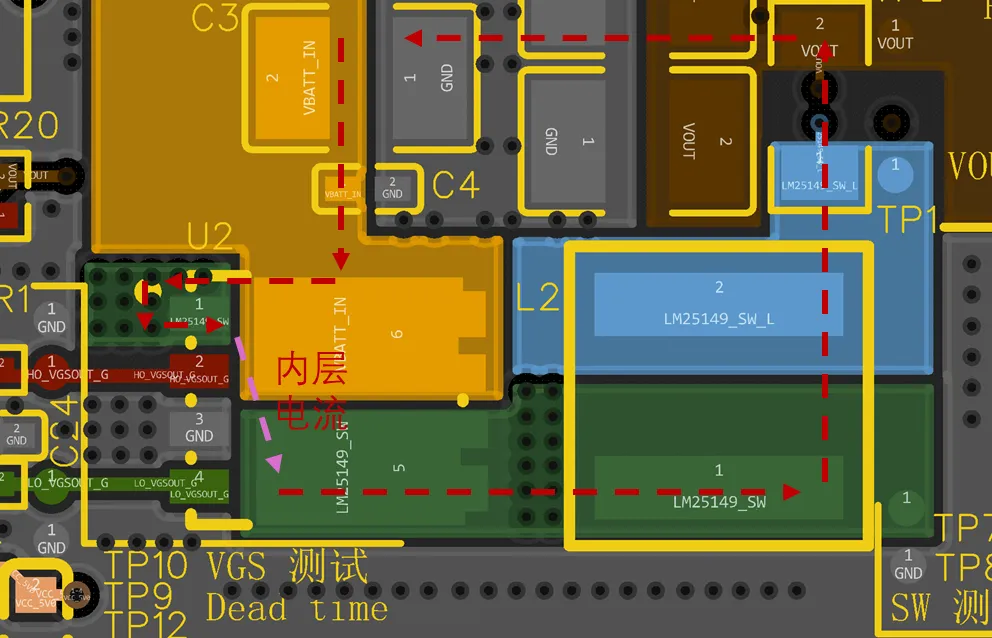
MOSFETs en spoellussen:
① Het gebruik van twee-in-één MOSFETs vermindert het lay-outoppervlak en de kosten, het nadeel is dat de Layout SW de minimale lus niet kan behouden;
② Het SW-punt van de twee-in-één MOSFET kan niet dezelfde laag van PCB-spoor realiseerbaar maken, en de laagbedekking moet worden gewijzigd om een continue stroomstroom te realiseren.
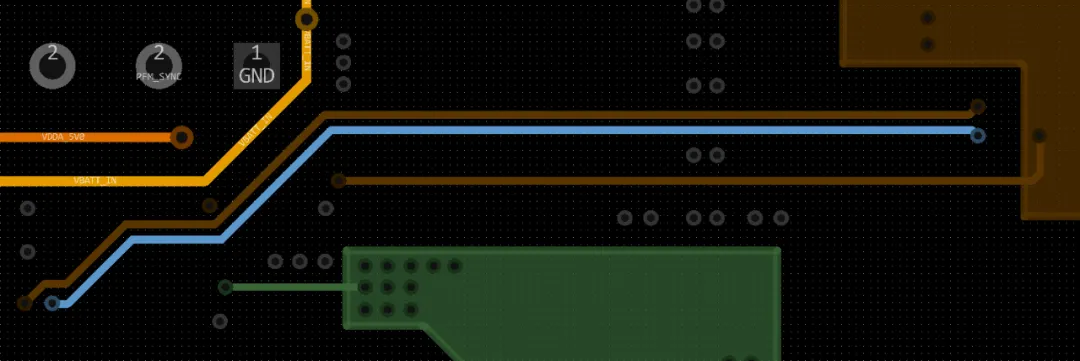
Stroommeting:
① De stroommeetlus moet differentiële sporen zijn, en er moet een referentie-GND-vlak aanwezig zijn;
② Er is geen behoefte aan impedantie- en gelijke lengtebeheersing, en de sporen behouden de minimale afstand van de layout.
FB Feedback:
Weerstanden en andere componenten zitten dicht bij de pinnen van de controllerchip.
Koeling en GND:
Verwarmingscomponenten: MOSFET's, spoelen en shuntweerstanden kunnen passend de warmtegeleiding in het vlakgebied verhogen, en het toevoegen van meer GND-vias kan helpen de koelomstandigheden van de gehele printplaat te verbeteren.
3- Samenvatting van de domein-gestuurde BUCK-voeding van eerste klasse
3.1 3D-tekening
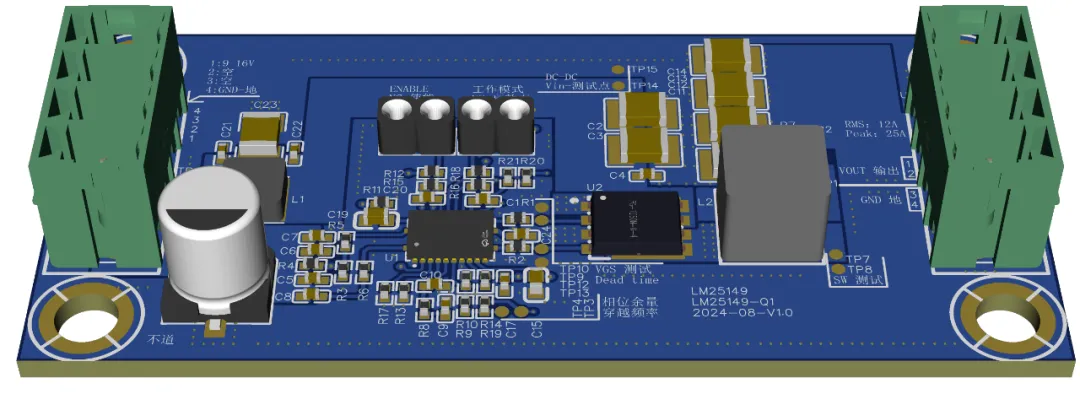
3D-figuur-1
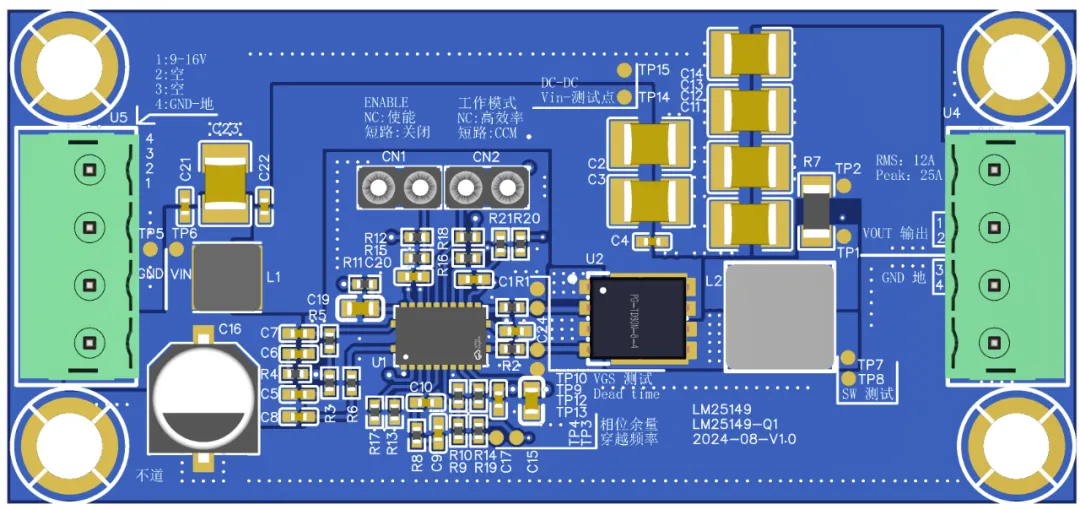
3D-figuur-2
3.2 Ontwerpsamenvatting
① Het schakelende voedingsontwerp maakt gebruik van een 4-laags ontwerp, PCB-dikte 1,6 mm, afmetingen 30x65 mm;
② De uitgangsstroom kan voldoen aan de maximale transientestroom van Qualcomm SA8295 van 24 A en ondersteunt een stationaire uitgangscapaciteit van meer dan 10 A.
4- Over Codaca Elektronica
Codaca richt zich op onafhankelijke R&D, ontwerp en productie van spoelen, en de VSEB0660-1R0M is geschikt voor de ontwikkeling en toepassing van Qualcomm-platforms. Het heeft technische voordelen zoals hoge kostenprestatieverhouding, sterke anti-verzadigingsstroomcapaciteit en geringe warmteontwikkeling, en beschikt over een in de industrie toonaangevende vermogen-op-volume-verhouding. Codaca richt zich op technologieonderzoek en -ontwikkeling, technologische innovatie, ontwikkelt uitstekende producten voor de spoelindustrie en draagt bij aan de ontwikkeling en toepassing van elektronische producten.
5- Testen en Verificatie
Raadpleeg voor vervolgonderzoek en verificatie: 03- Decoderen van het ontwerp van de voedingsbron in twee fasen van de Qualcomm Automotive Domain Controller: analyse van prestatietestmetingen .
[Referentie]
1.LM25149-Q1:ti.com.cn/product/cn/LM25149-Q1
2.BUK9K6R2-40E: https://www.nexperia.cn/product/BUK9K6R2-40E