
Szybkie linki

Rosnące zapotrzebowanie na automatyzację w przemyśle produkcyjnym i usługowym napędza szybki rozwój robotów ludzkokształtnych. Wraz ze wzrostem liczby stopni swobody (DOF) oraz poprawą szybkości reakcji na środownie, roboty ludzkokształtnych stały się bardziej zaawansowane, co pozwala im bardziej realistycznie symulować ruchy człowieka. Wyższa liczba stopni swobody oznacza, że roboty ludzkokształtnych wymagają większej liczby napędów silnikowych, a indukcyjne elementy odgrywają istotną rolę w systemach sterowania silników, zarządzania energią oraz przetwarzania sygnałów w robotach ludzkokształtnych.

1- Główne zastosowanie indukcyjnych elementów w robotach ludzkokształtnych
Indukcyjne elementy są głównie stosowane w robotach ludzkokształtnych w napędach silników, zarządzaniu energią oraz przetwarzaniu sygnałów.
Napęd silników: Szersze roboty humanoidalne dostępne na rynku zazwyczaj posiadają 40-50 silniki artykulowane, które decydują o swobodzie i elastyczności ruchu robota. Dławik napędza silnik poprzez magazynowanie energii i gładki przepływ prądu, co pozwala na płynne obracanie się silnika, wspomagając układ sterowania silnika robota humanoidalnego w osiąganiu ruchu w stawach, korekty położenia oraz zachowania dynamicznej równowagi. Napędy silników i obciążenia o dużej mocy wymagają dławików o wysokich parametrach nasycenia prądu oraz dużej nośności prądowej, aby radzić sobie z chwilowymi fluktuacjami prądu. Jednocześnie konieczne jest zmniejszenie strat, aby poprawić sprawność systemu i wydłużyć czas pracy na baterii.
Zarządzanie energią: Induktory są podstawowymi komponentami przetwornic DC-DC (takimi jak obwody buck i boost) w systemach zarządzania energią, zapewniając stabilne zasilanie przy różnych napięciach dla procesorów AI, czujników, modułów komunikacyjnych itp., optymalizując dystrybucję energii oraz sprawność konwersji. Wymagane są niskie rezystancje prądu stałego (DCR), wysoka sprawność konwersji w celu zmniejszenia strat mocy, wysoki prąd nasycenia oraz dobra stabilność temperaturowa.
Przetwarzanie sygnału: W systemach przetwarzania sygnałów induktory są głównie stosowane do tłumienia hałasu wysokoczęstotliwościowego i zakłóceń EMI, zapewniając czystość sygnału. Na przykład w systemie percepcyjnym pomagają realizować postrzeganie i interaktywną odpowiedź robotów ludzkich na środowisko zewnętrzne. W systemach komunikacyjnych i sterowania induktory wykorzystują projektowanie EMI, aby zagwarantować odporność na zakłócenia modułów radarowych, kamer, komunikacji bezprzewodowej oraz innych, poprawiając stabilność pracy urządzeń.
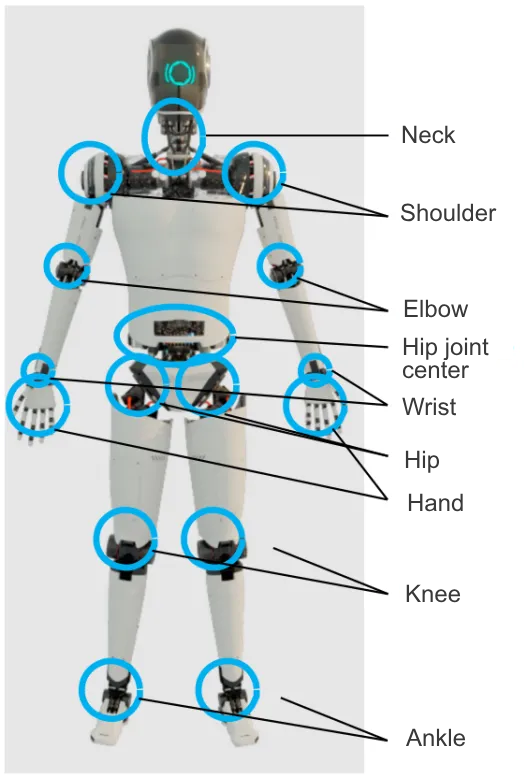
Rysunek 1: Główne położenie silnika stawowego humanoida (obraz z TI)
2- Zapotrzebowanie na indukcyjności w robotach humanoidach
System elektroniczny robotów humanoidów jest złożony, a aby osiągnąć precyzyjną kontrolę ruchu i niezawodną komunikację, wymaga wsparcia podstawowych komponentów takich jak indukcyjności. Charakterystyki techniczne robotów humanoidów również determinują ich wysokie wymagania dotyczące wydajności i konstrukcji produktów indukcyjnych. Wymagania są głównie następujące:
2.1 Miniaturyzacja i duża gęstość mocy
Przestrzeń wewnętrzna humanoidów robotów jest skrajnie kompaktowa, integrując dużą liczbę silników, jednostek obliczeniowych (CPU/GPU), czujników itp., a płyta obwodu zasilania (takiego jak POL, konwerter punktu obciążenia) musi być zminięjszona. Cewki muszą być małe i lekkie, aby pasować do kompaktowych rozwiązań konstrukcyjnych, a jednocześnie charakteryzować się wysoką gęstością mocy, aby osiągnąć wysoką wydajność w małej przestrzeni. Cewki o konstrukcji odlewanej lub ekranowanej wytrzymują bardzo duże prądy nasycenia i prądy wzrostu temperatury przy małych gabarytach, co jest niezbędne do osiągnięcia wysokiej mocy wyjściowej w ograniczonej przestrzeni.
2.2 Silna odporność na zakłócenia elektromagnetyczne
Wewnętrzne środowisko elektromagnetyczne robotów jest skomplikowane i obejmuje szybkie układy cyfrowe, silne zakłócenia przełączające od sterowników silników oraz wrażliwe czujniki (takie jak IMU i kamery). Stosowanie nieekranowanych dławików generuje silne pole magnetyczne i staje się źródłem zakłóceń elektromagnetycznych, co znacząco wpływa na stabilność odczytów czujników i systemu sterowania. Dławiki ekranowane charakteryzują się minimalnymi przeciekami magnetycznymi, skutecznie redukując zakłócenia elektromagnetyczne i zapewniając niezawodną pracę innych komponentów systemu. Dlatego dławiki formowane, dławiki mocy o wysokim prądzie oraz inne dławiki mocy z magnetycznymi strukturami ekranującymi są bardziej idealnym wyborem.
2.3 Wysoki prąd nasycenia
Obciążenie dynamiczne robota zmienia się gwałtownie, na przykład podczas nagłego uruchomienia, jazdy lub podnoszenia ciężkich przedmiotów, co powoduje natychmiastowy wzrost prądu w silniku i jednostce obliczeniowej. Induktor musi być w stanie uniknąć nasycenia magnetycznego przy wysokich prądach (tj. wartość indukcyjności nie spada gwałtownie), w przeciwnym razie pętla zasilania wyjdzie z kontroli, co spowoduje załamanie napięcia systemu i ponowne uruchomienie. Dlatego indukcyjność musi charakteryzować się „miękkim nasyceniem”, tj. gdy przybliżamy się do prądu nasycenia, wartość indukcyjności maleje powoli, a nie gwałtownie. Zapewnia to bufor dla systemu sterowania mocy i zwiększa niezawodność systemu.
2.4 Wysoka odporność na wibracje i udary
Roboty humanoidalne często się poruszają, wykazują dużą wibrację mechaniczną, a cewka powinna charakteryzować się odpornością na wibracje i wstrząsy, jej złącza lutownicze powinny być solidne, a obudowa oraz wewnętrzna cewka muszą wytrzymać naprężenia mechaniczne. Cewka o strukturze formowanej całkowicie utwardza cewkę wewnątrz materiału magnetycznego, co zapewnia bardzo wysoką wytrzymałość mechaniczną oraz doskonałą odporność na wstrząsy, dlatego jest powszechnie stosowana w systemach robotów humanoidalnych.
2.5 Dostosowanie do środowisk o wysokiej częstotliwości i wysokiej temperaturze
Cewka powinna charakteryzować się dobrą pracą przy wysokich częstotliwościach, skutecznie tłumić zakłócenia wysokiej częstotliwości, zmniejszać tętnienia i hałas oraz utrzymywać niskie straty energetyczne przy wysokich częstotliwościach, aby poprawić sprawność konwersji.
Dodatkowo dławik powinien być w stanie utrzymać stabilną wartość indukcyjności w środowisku o wysokiej temperaturze, wartość Q powinna niewiele maleć, a jego właściwości nie powinny się łatwo pogarszać, aby zapewnić wiarygodność pracy indukcyjnej robota podczas długotrwałej pracy.
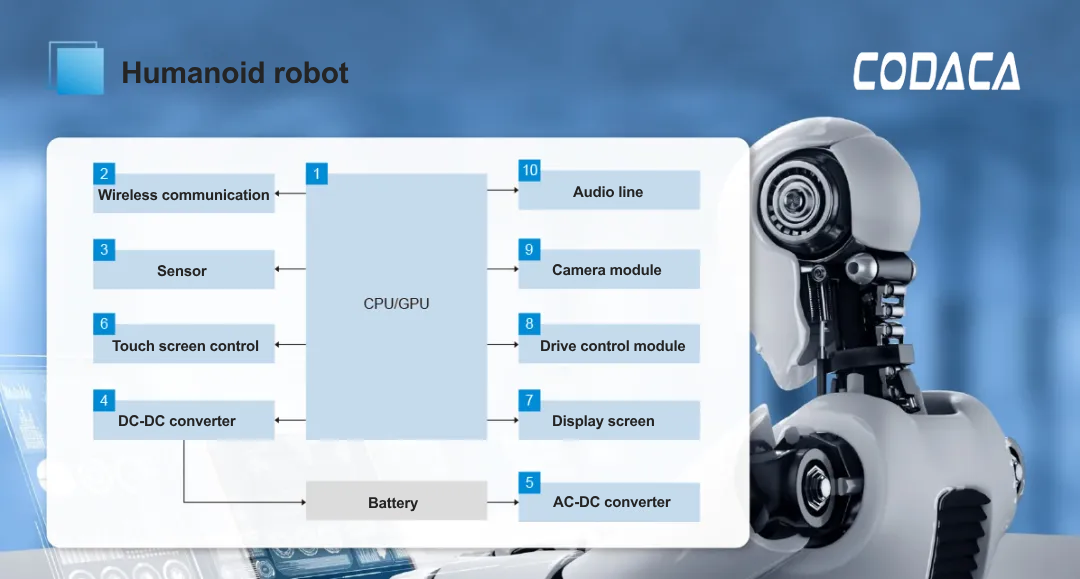
Rys. 2 Zastosowanie dławika w robocie humanoidalnym
3- Codaca rozwiązanie z dławikiem dla robotów humanoidalnych
W zastosowaniach takich jak roboty humanoidalne, które łączą dużą gęstość mocy, wysoką wydajność, wysoką niezawodność, złożone środowisko zakłóceń elektromagnetycznych oraz trudne warunki mechaniczne, dławiki dużej prądnika, ekranowane, z rdzeniem ze spiekowanego proszku metalowego stały się niepodważalnym głównym wyborem w obwodach zasilania, szczególnie w zasilaczach typu POL dla jednostek obliczeniowych i napędów silników w stawach. Ich projekt doskonale łączy trzy podstawowe wyzwania: wydajność, rozmiar i niezawodność.
Dzięki niezależnym badaniom i rozwojowi oraz innowacjom technologicznym Codaca oferuje adaptacyjne rozwiązania w zakresie cewek indukcyjnych dla humanoidów robotów i wprowadziła na rynek wiele kategorii oraz modeli produktów, takich jak wysokoprądowe cewki mocy z ekranowaną strukturą magnetyczną, cienkie i lekkie cewki formowane oraz dławiki typu wspólnego. Mogą zapewniać różne charakterystyki elektryczne, aby spełniać wymagania wysokiej wydajności cewek w różnych zastosowaniach w robotach humanoidach, a także są powszechnie stosowane w modułach komunikacji i nawigacji robotów, modułach zasilania, modułach napędu silników, płytach sterujących robotów oraz innych modułach.
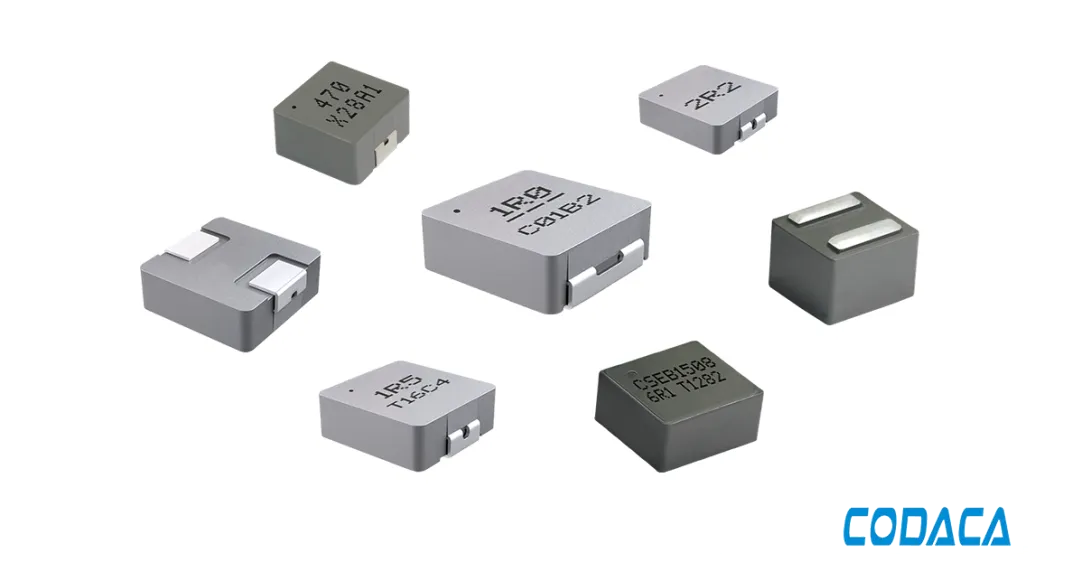
3.1 Kompaktowa wysokoprądowa cewka mocy
Z wyłączeniem urządzeń do produkcji elektrycznych są głównie stosowane w modułach DC-DC w napędach silników i systemach zarządzania energią humanoidów. Wysokoprądowy dławik wykorzystuje niskoutratne rdzenie magnetyczne z proszku metalu niezależnie opracowane przez Codaca, charakteryzujące się wysokim prądem nasycenia, niskimi stratami, wysoką sprawnością przetwarzania oraz wysoką temperaturą pracy, co gwarantuje wydajność i wytrzymałość robotów humanoidów. Prąd dławika może osiągać do 422 A, a temperatura pracy do 170°C. Jednocześnie produkt posiada ekranowaną strukturę magnetyczną, co zapewnia silną odporność na zakłócenia elektromagnetyczne. W pełni spełnia wymagania robotów humanoidów pod względem wysokiego prądu nasycenia, wysokiej temperatury pracy oraz niskiego poziomu zakłóceń elektromagnetycznych.
Rekomendowane modele: CSBX , CSBA , CSCM , CSUT , CSCIL , itp.

3.2 Cienkie i lekkie formowane dławiki
Indukcyjności formowane są głównie stosowane w modułach wyświetlaczy robotów humanoidalnych, modułach sterowania ekranem dotykowym, modułach DC-DC itp. Zatopione dławiki mocy wykorzystują niskoutratny proszek stopowy niezależnie opracowany przez CODACA, cechujący się niskimi stratami, wysoką efektywnością, szerokim zakresem częstotliwości użytkowania oraz zdolnością do redukcji hałasu do bardzo niskiego poziomu. Projekt cienki i lekki (minimalny rozmiar 2 mm) oszczędza miejsce na płytce PCB, nadaje się do gęstego montażu, a także charakteryzuje się dużą odpornością na obciążenia mechaniczne, wstrząsy i drgania (odporność na wibracje powyżej 10G), spełniając wymagania robotów humanoidalnych pod względem wysokiej gęstości mocy i wysokiej stabilności.
Rekomendowane modele: CSAG , CSAC , CSAB , CSEB , CSHB , itp.
3,3 SMD dławik mocy
Codaca SMD dławiki mocy są głównie stosowane w modułach aparatu, modułach audio, modułach DC-DC itp., spełniając wymagania dotyczące małych rozmiarów dławika, dużego prądu oraz wysokiej sprawności przetwarzania.
Rekomendowane modele: SPRHS , CSUS , CRHSM , VCRHS , SPQ , itp.

Jako wiodący dostawca w dziedzinie technologii komponentów magnetycznych, Codaca Electronics od 24 lat koncentruje się na rozwoju cewek indukcyjnych, a inżynierowie mogą dobrać odpowiednią wartość indukcyjności, prąd znamionowy, częstotliwość przełączania, wymiary produktu itp. zgodnie ze specyficznymi wymaganiami wydajnościowymi poszczególnych podsystemów robota ludzkopodobnego. Aby uzyskać więcej szczegółowych informacji, skontaktuj się z przedstawicielem handlowym firmy Codaca.