
Szybkie linki

Szybki rozwój przemysłu pojazdów napędzanych energią nowej generacji przyczynił się do eksplozywnego wzrostu różnych łańcuchów przemysłowych, a inteligentne systemy samochodowe oraz jazda autonomiczna stały się najważniejszym kierunkiem rozwoju kluczowych kompetencji w zakresie pojazdów napędzanych energią nowej generacji, co stwarza nowe wyzwania i możliwości dla wysoko zintegrowanego centralnego komputera i kontrolera domeny, szczególnie pod względem niezawodności, gęstości mocy, EMC, wysokiej sprawności oraz opłacalności zasilaczy impulsowych typu DC-DC.
Jako dostawca inteligentnych kontrolerów kokpitów, SA8155 i SA8295 zajmują ważne miejsce, a sprzeczność między prądem chwilowym, stabilnym prądem pracy, wydajnością w stanie czuwania, kosztem oraz projektem EMC zasilacza impulsowego głównego zasilania SOC centralnego sterownika domeny (zasilanie przekształcane z wejściowego poziomu akumulatora) stała się ogromnym wyzwaniem dla projektowania zasilaczy typu BUCK. Jak rozwiązać i zrównoważyć te sprzeczności to kierunek techniczny współpracy producentów architektur zasilaczy impulsowych, układów scalonych zasilania, dławików, tranzystorów MOSFET i kondensatorów.
W tym artykule omówiono projektowanie przełączającego zasilacza DC-DC jako głównego źródła zasilania dla centralnej kontroli domeny z dużą dynamiką przełączania (100-300%), w tym wybór schematu zasilania, dławika, kondensatora oraz inne metody projektowania, biorąc pod uwagę wyzwania związane z wymiarami, kosztem, sprawnością i wydajnością.
W tym rozdziale, na przykładzie kontrolera domenowego Qualcomm SA8295, omówione zostało praktyczne zaprojektowanie pierwszego stopnia przełączającego zasilacza typu BUCK.
Do zrozumienia tego rozdziału niezbędne jest zapoznanie się z pierwszą serią artykułów (szczegółowa teoria i obliczenia dotycząca przełączającego zasilacza BUCK) oraz szczegółowe zaprojektowanie zasilacza BUCK w oparciu o LM25149.
Cykl ten składa się z trzech serii (aktualizowany na bieżąco):
02-Odkodowanie projektu zasilacza pierwszego stopnia dla samochodowego kontrolera domenowego Qualcomm: schemat ideowy i projekt płytki PCB (ten rozdział)
1- Cele i wyzwania projektowania
1.1 Wymagania dotyczące prądu chwilowego SA8295

Tabela 1: Wymagania projektowe zasilania SA8295
Uwaga: Najnowsze wymagania projektowe SA8295 to 21A (1 NPU) i 24A (2 NPU), a ten projekt może obejmować (ochronę przed przeciążeniem 30A)
1.2 Cele projektowe
Ten projekt wykorzystuje Zasilanie pierwszego stopnia kontrolera domeny LM25149 , które może spełniać wymagania dotyczące prądu chwilowego 24A (100 μs) oraz spełniać wymagania pracy w stanach ustalonych powyżej 10A, osiągając tym samym kompleksową równowagę pomiędzy objętością, kosztem i wydajnością.
Uwaga: Prąd chwilowy nie powoduje problemu z nagrzewaniem (dla Qualcomm SA8295 tylko 100 μs prądu chwilowego), natomiast duży prąd w stanie ustalonym spowoduje wzrost temperatury; wpływ podwyższonej temperatury należy zmierzyć (schemat projektowy dobiera się według rzeczywistych warunków środowiskowych).
2- Schemat i projekt PCB
2.1 Dobór podstawowych komponentów
Kryteria doboru głównych komponentów zasilania przełączającego kontrolera domeny: wydajność na pierwszym miejscu, uwzględnienie kosztów oraz minimalizacja powierzchni płytki PCB; Biorąc pod uwagę problemy związane z EMC i pętlą prądową zasilacza przełączającego typu BUCK, projekt ten jest zgodny z ogólną teorią i zasadami projektowania zasilaczy BUCK, można się odwołać do ogólnych metod projektowania.
Aby uzyskać szczegółowe informacje dotyczące doboru i obliczeń komponentów elektronicznych, proszę zapoznać się z rozdziałem 1 ( Dekodowanie projektu zasilania pierwszego etapu sterownika domenowego Qualcomm Automotive: Projekt i obliczenia zasilania )
Opcja 2 dla tego projektu (wykorzystanie ośmiu ceramicznych kondensatorów o pojemności 47uF w obudowie C1210). Projekt nie ogranicza się wyłącznie do tego wyboru, a projekt produktu może zostać dostosowany do rzeczywistych warunków, a optymalizacja może być przeprowadzona na podstawie wyników rzeczywistych testów.
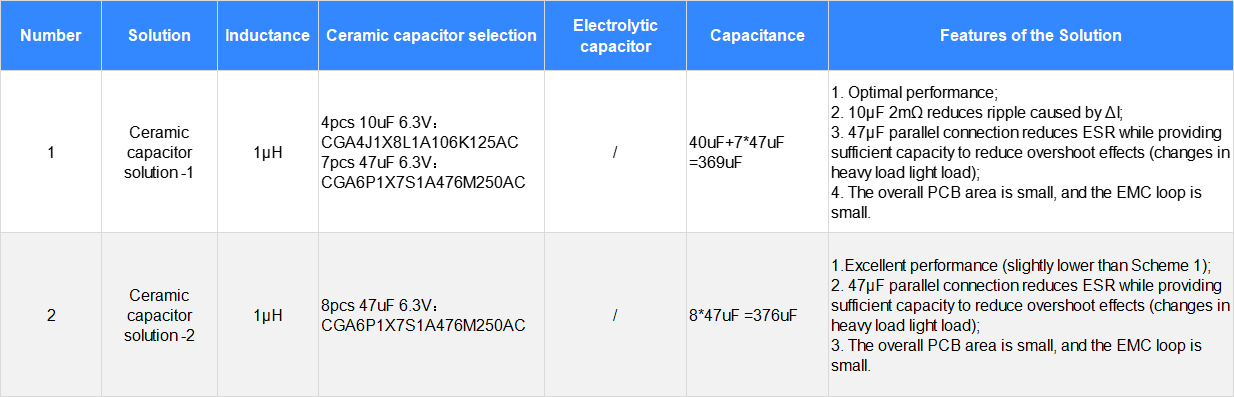
Tabela 2: Zasilacz typu BUCK - projekt rozwiązania
2.1.1 Zasilacz typu BUCK - dobór tranzystorów MOSFET

Tabela 3: Zasilacz typu BUCK - dobór tranzystorów MOSFET
2.1.2 Zasilacz typu BUCK - dobór dławika
Wybór cewki indukcyjnej zastosowanej w modelu: VSEB0660-1R0MV

Tabela 4: Dobór dławika
2.1.3 Dobór kondensatora wyjściowego filtra dla zasilacza BUCK
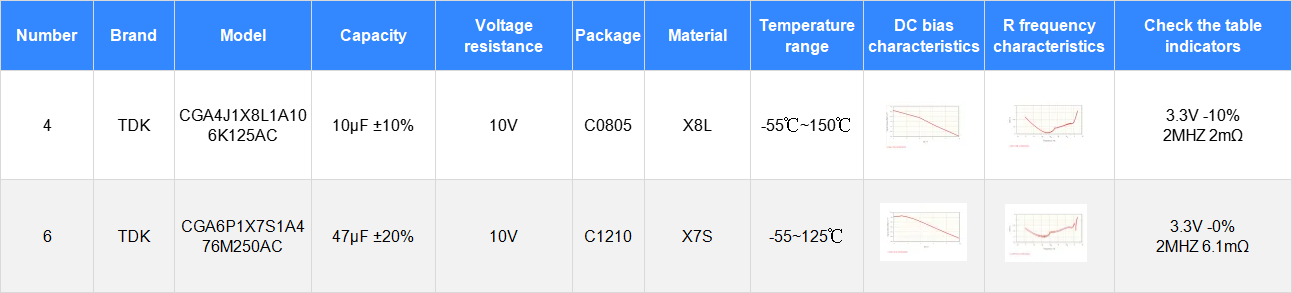
Tabela 5: Dobór kondensatora wyjściowego filtra dla zasilacza BUCK
2.1.4 Zasilanie BUCK - wybór kondensatorów wejściowych filtra

Tabela 6: Zasilanie BUCK - wybór kondensatora wejściowego filtra
2.2 Projektowanie schematu i PCB za pomocą narzędzi projektowych
2.2.1 Schemat i projekt płytki PCB: JLC Technology EDA ( https://lceda.cn/)
Rysunek 1 Wprowadzenie do Caritron EDA
JLC Technology EDA to wiodące, bezpłatne narzędzie do projektowania EDA w Chinach, cechujące się zaawansowanymi funkcjami i wysoką wydajnością projektowania; niniejszy projekt wykorzystuje schemat i płytkę PCB zaprojektowane w JLC Technology EDA.
2.3 Zasilacz BUCK - projekt schematu elektrycznego
2.3.1 Zasilacz BUCK - projekt schematu elektrycznego
Projekt zasada działania oparty jest na specyfikacji LM25149-Q1 oraz oficjalnej płytce rozwojowej; projekt spełnia podstawowe zasady działania przełączanego zasilacza typu BUCK oraz wymagania projektowe zasilania głównego kontrolerów o wysokiej przepustowości.
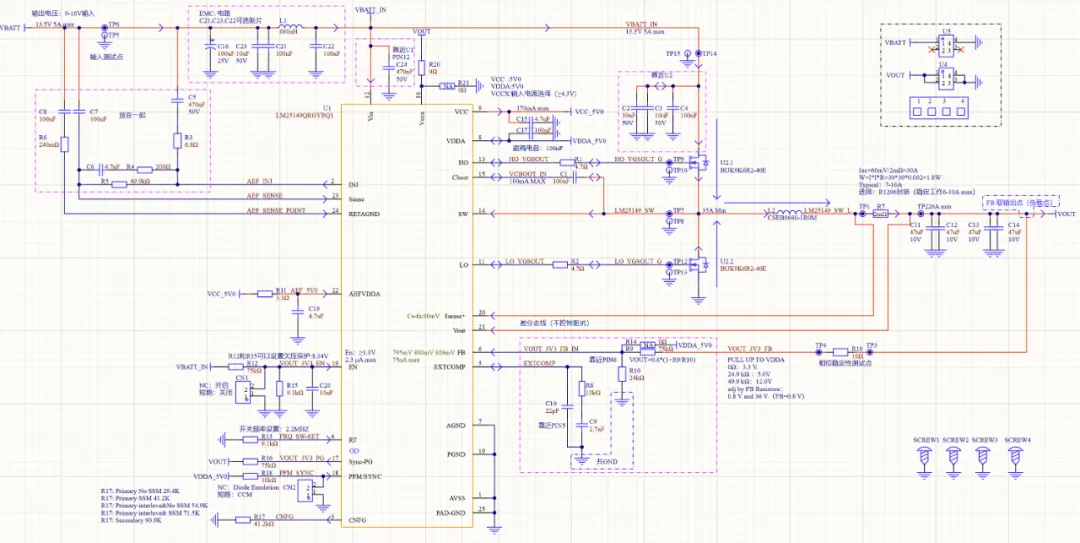
Rysunek 2 Schemat blokowy LM25149
2.3.2 Zasilanie BUCK - kluczowa technologia w projektowaniu schematu
Obwód wejściowy EMC:
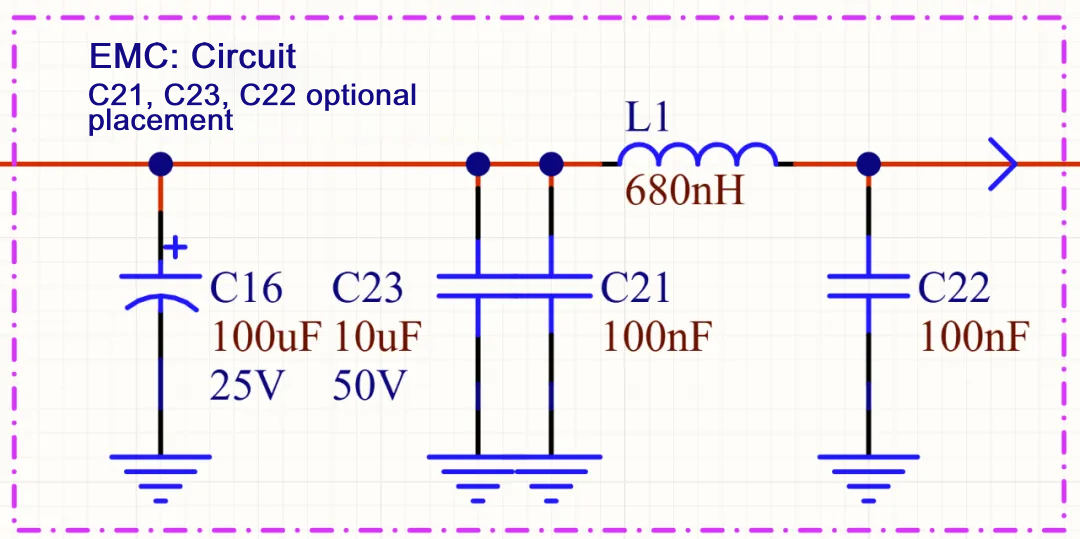
Punkty techniczne:
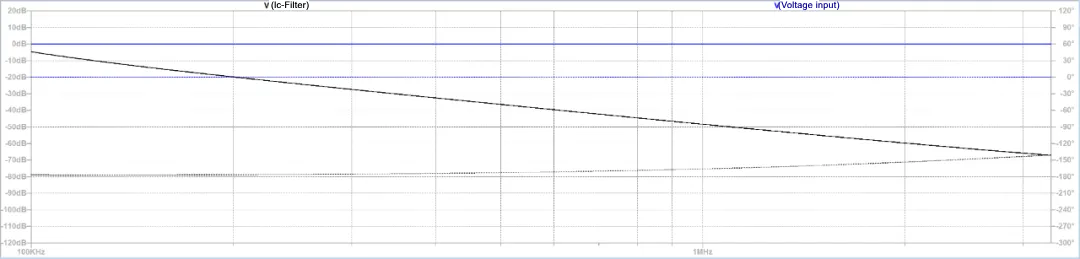
① Główną funkcją L1 jest zmniejszenie wpływu przewodzonego hałasu zakłóceń pochodzącego od zasilacza impulsowego na zasilanie wejściowe. Częstotliwość przełączania zasilacza impulsowego wynosi 2,2 MHz, a L1 i C23 tworzą obwód filtru LC (C16 to kondensator elektrolityczny, głównie dla niskich częstotliwości poniżej 500 kHz), co redukuje sygnał o 60 dB przy 2,2 MHz.
② C21 redukuje hałas przełączania (drgania na zboczach narastających i opadających tranzystora mocy), głównie zmniejszając zakłócenia EMC w zakresie 10–100 MHz.
③ Jeśli C21 i C23 są stosowane w zasilaczach pierwszego stopnia (przed zabezpieczeniem), należy wybrać model kondensatora z giętkimi końcówkami, a jeśli układ jest chroniony, można wybrać kondensator klasy automotive. Podobny mechanizm ochrony można również zrealizować za pomocą dwóch kondensatorów ułożonych szeregowo.
Te same wymagania dotyczą tranzystorów mocy MOSFET i kondensatorów wejściowych LM25149 oraz kondensatorów odprzęgających, jednak projekt ten nie jest stosowany w celu weryfikacji wydajności; zastosowano pojedynczy kondensator ceramiczny, a projekt na poziomie produktu spełnia wymagania projektowe dla przemysłu motoryzacyjnego.
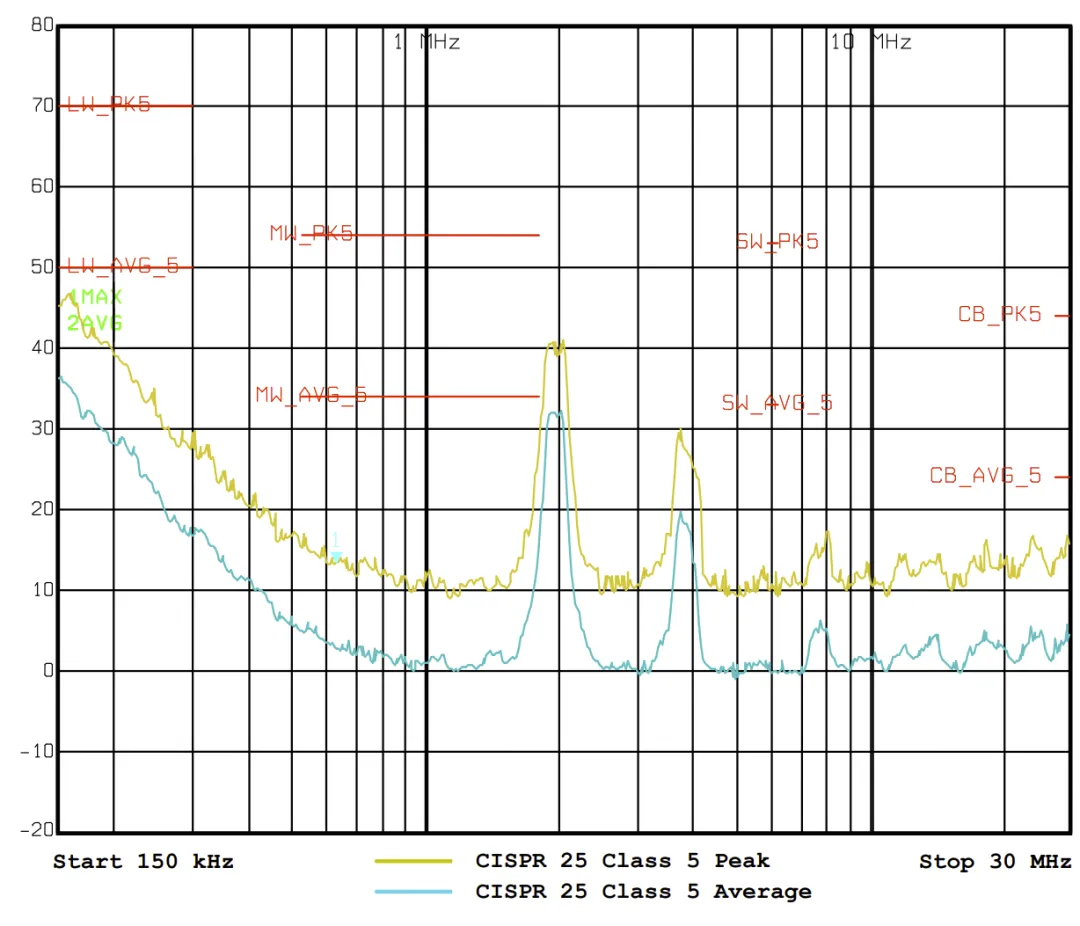
Uwaga: Aktywne wygaszanie zakłóceń EMC oraz technologia podwójnego losowego rozpraszania widma sygnału w układzie LM25419 ogranicza amplitudę zakłóceń EMC jedynie do pewnego stopnia, nie eliminując ich całkowicie; w przypadku częstotliwości przełączania 2,2 MHz i związanych z nią energii przy dużym prądzie (≥10 A), wciąż istnieje ryzyko przekroczenia normy, decydujące znaczenie ma rzeczywista diagnostyka; jeśli po usunięciu kondensatora C23 nadal możliwe jest spełnienie wymagań dotyczących promieniowania przewodzonego, można pominąć użycie C23, co obniży koszty aplikacji.
Kondensatory wejściowe zasilacza typu BUCK:
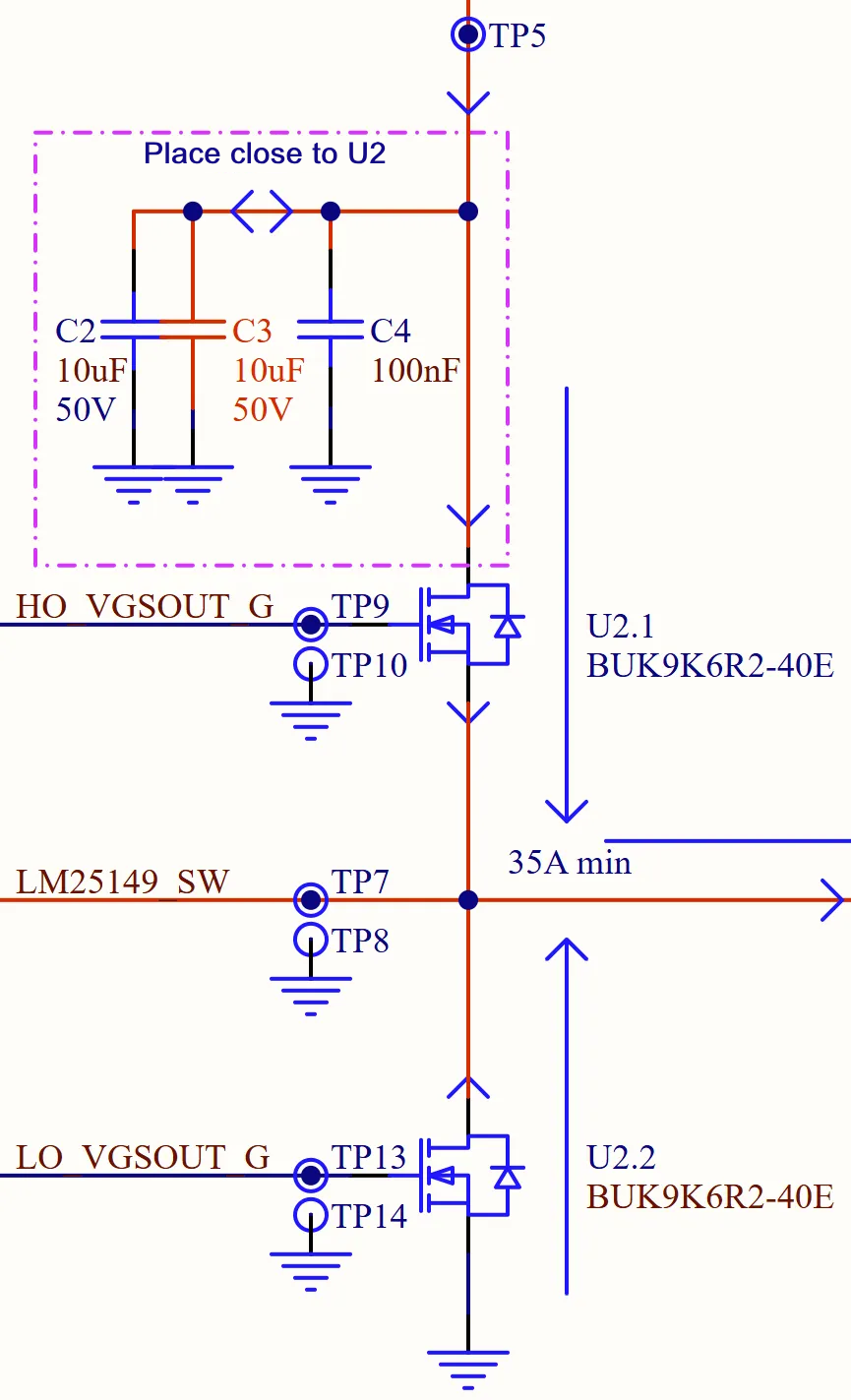
① C2, C3 to kondensatory wejściowe zasilacza typu BUCK, które są kluczowe dla wydajności EMC zasilacza impulsowego. Kondensatory 10 µF należy dobrać tak, aby impedancja przy około 2 MHz wynosiła ≤5 mΩ. Modele CGA4J1X8L1A106K125AC i CGA6P1X7S1A476M250AC charakteryzują się dobrymi parametrami technicznymi i mogą służyć jako odniesienie. Do wyboru są kondensatory o dielektryku X7R, napięciu przebicia 35 V/50 V, w obudowach C1210 i C1206. W tym projekcie wybrano obudowę C1210, co umożliwia weryfikację szerokiego zakresu modeli pod kątem wydajności.
② C4 to kondensator wysokoczęstotliwościowy zapewniający EMC, należy wybrać typ 50 V, X7R, w obudowie C0402.
W przypadku C2, C3, C4 należy zwrócić uwagę na pętlę prądową podczas układania śladów (szczegóły patrz w sekcji Layout). Należy spełnić podstawowe wymagania dotyczące kondensatora wejściowego zasilacza BUCK oraz zasad projektowania. Aby lepiej zrozumieć rolę kondensatora wejściowego, warto zapoznać się z teorią działania zasilaczy impulsowych typu BUCK.
③ TP7, TP9, TP13 są używane do testowania sygnałów TG, BG i SW przełącznika oraz do weryfikacji rozsądności czasu martwej strefy, właściwości dzwonienia oraz jakości zboczy narastających i opadających tranzystora MOSFET, co stanowi ważny wskaźnik elektrycznej wydajności zasilacza impulsowego.
Punkt testowy TP masy (GND) służy do zmniejszenia pętli uziemienia podczas pomiaru oscyloskopem i poprawy dokładności pomiaru; przy projektowaniu układu (LAYOUT) należy zadbać o możliwie bliskie umieszczenie punktu testowego względem odpowiedniego sygnału pomiarowego.
Rezystor sterujący bramki MOSFET:
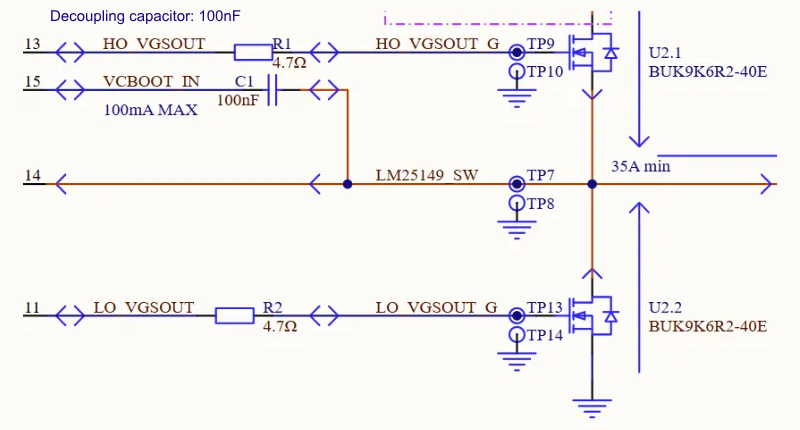
① R1 i R2 to rezystory napędu bramki tranzystora MOSFET, które mają istotny wpływ na zbocza narastające i opadające tranzystora mocy MOSFET.
② Wybór R1 i R2 zależy od połączonych czynników, takich jak kontrolowany prąd wyjściowy sterownika zasilania typu BUCK (sterownik (oporność PULL i PUSH), impedancja bramki oraz charakterystyka ładunku mocy tranzystora MOSFET (pojemność wejściowa CISS)), a całkowita oporność całego obwodu wstępnie dobierana jest na wartość ≤ 10 omów, co zależy również od charakterystyki ładunku i wymaga dokładnego dostrajania w celu wybrania odpowiedniej wartości oporności.
③ R1 i R2 to również kluczowe parametry, które najbardziej wpływają na zakłócenia przełączające EMC oraz podstawowe czynniki obwodowe wpływające na straty przełączania.
Uwaga: do testowania charakterystyk przełączania i czasu martwego stosuje się 6 punktów pomiarowych.
Pętla mocy wyjściowej:
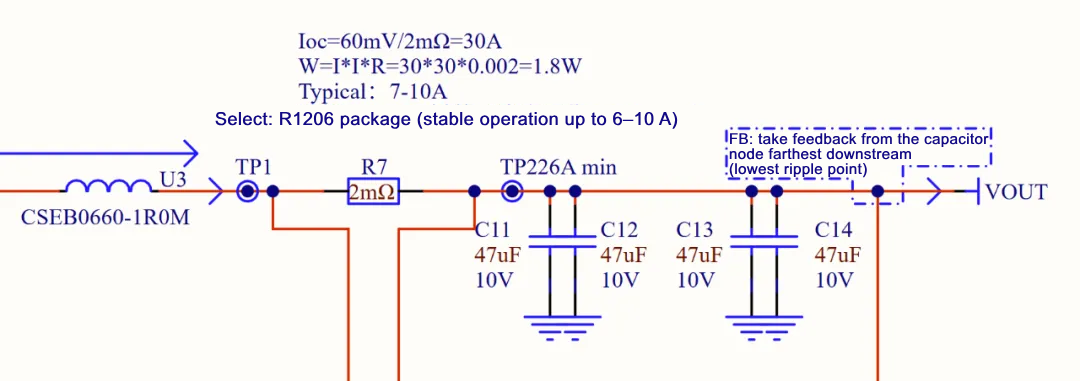
① Wybór dławika: Przy doborze dławika należy przede wszystkim wziąć pod uwagę dwa czynniki:
- Prąd roboczy chwilowy: zdolność do chwilowego wyjścia 24 A (czas: 100 μs);
- Prąd roboczy w stanie ustalonym: 10 A, możliwość stabilnej pracy przy prądzie 10 A (obejmująca warunki temperatury otoczenia do 85°C);
-Czas trwania przejściowego prądu roboczego wynosi ≤ 100 µs i występuje w fazie uruchamiania; tylko warunek zapewnienia, że indukcyjność nie jest nasycana, spełnia wymagania (spełnienie wartości indukcyjności prądu).
② Wybór rezystora pomiarowego: Rezystor pomiarowy został wybrany w obudowie R1206, a moc rozpraszana ≥ 0,5 W;
③ Wybór kondensatorów: Zobacz rozdział dotyczący wyjściowego kondensatora filtrującego w pierwszej części rozdziału;
Obwód sprzężenia zwrotnego:
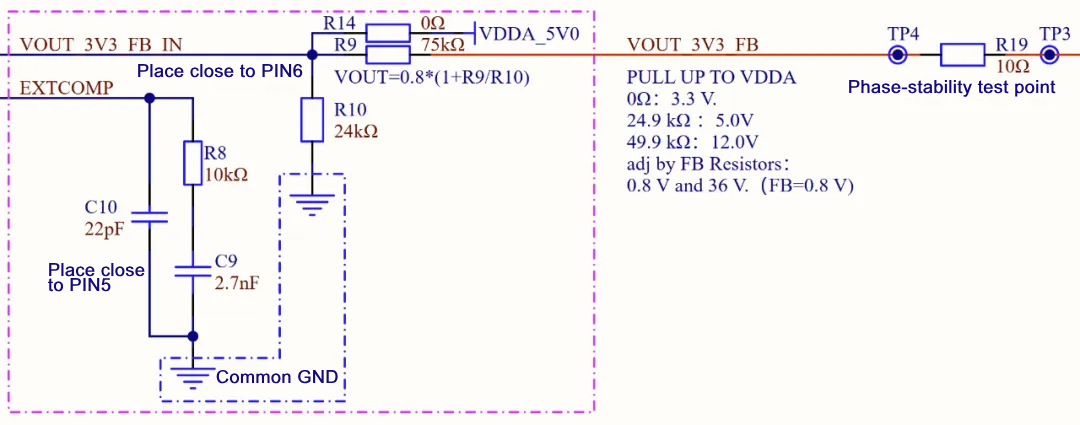
LM25149 posiada konfigurację wyjścia stałą oraz konfigurację z ujemnym sprzężeniem zwrotnym, szczegółowe informacje zawarte są w karcie katalogowej;
① Rezystor R14l podłączony do VDDA, wyjście 3,3V
② R14=24,9K, wyjście 5,0V
③ R14=49,9K, wyjście 12,0V
Napięcie wyjściowe jest konfigurowane za pomocą rezystorów R14, R9 i R10 na pustej naklejce;
R19 oraz zarezerwowane TP3, TP4: do testowania, zapasu fazy, częstotliwości przewalania itp.
Uwaga: TP3 i TP4 służą do pomiaru zapasu fazy, częstotliwości przewalania itp.
Ustawienia funkcji:
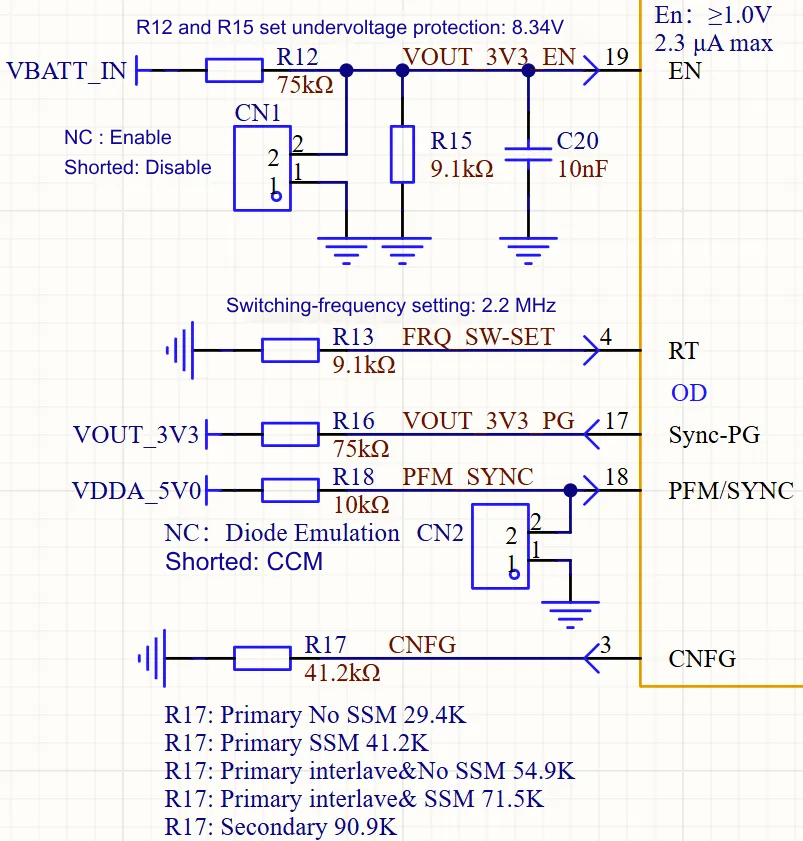
① EN: sygnał włączania, włączenie zasilania ≥ 1,0 V, może być chronione przez precyzyjne napięcie minimalne;
② Sync-PG: Wyjście synchronizacji lub Power Good, w tym projekcie stosowane jako Power Good;
③ PFM/SYNC
-Domyślny (NC) jumper: dioda analogowa, niewielki prąd wyjściowy, może pracować z wysoką sprawnością;
-Zwarciowy jumper do masy, wymuszony tryb CCM;
④ Ustawienie trybu pracy układu: łącznie 5 trybów pracy (zobacz książkę specyfikacji).
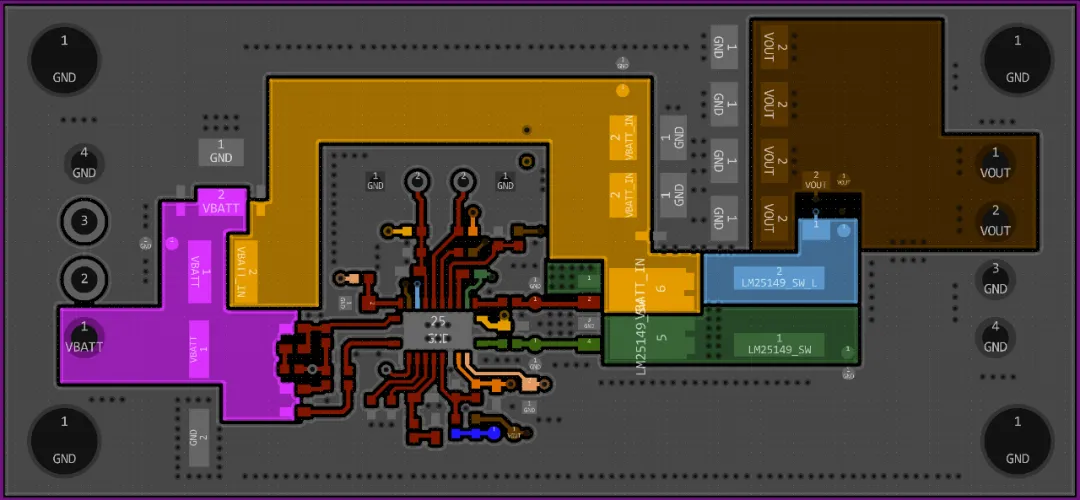
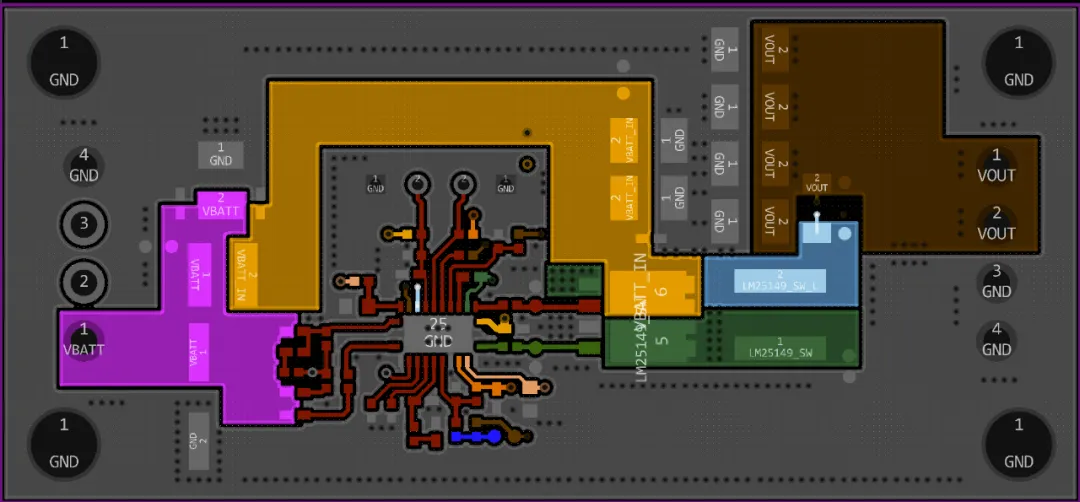
2,4 Zasilanie BUCK - projekt płytki PCB
2.4.1 Zasilanie BUCK - projekt płytki PCB
① -TOP
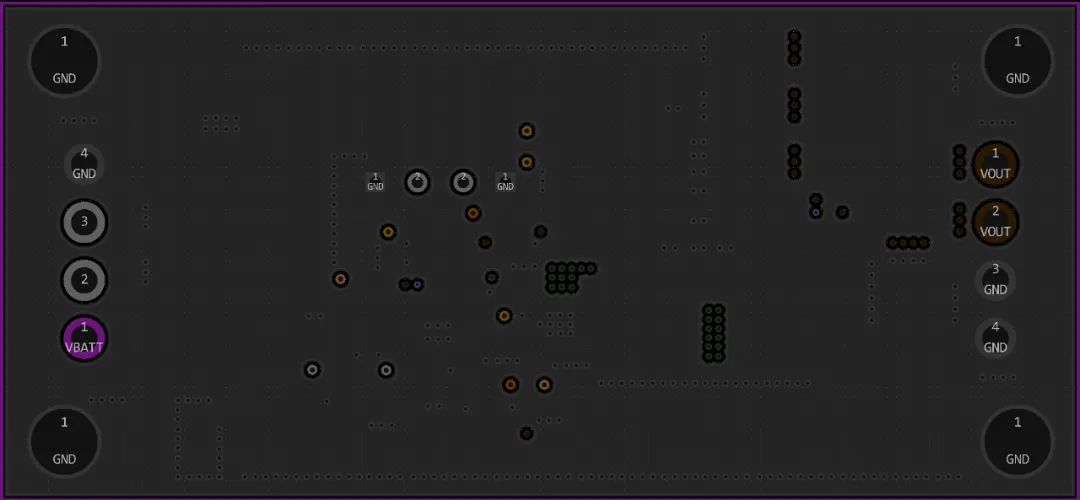
② -GND
③ -Sygnał
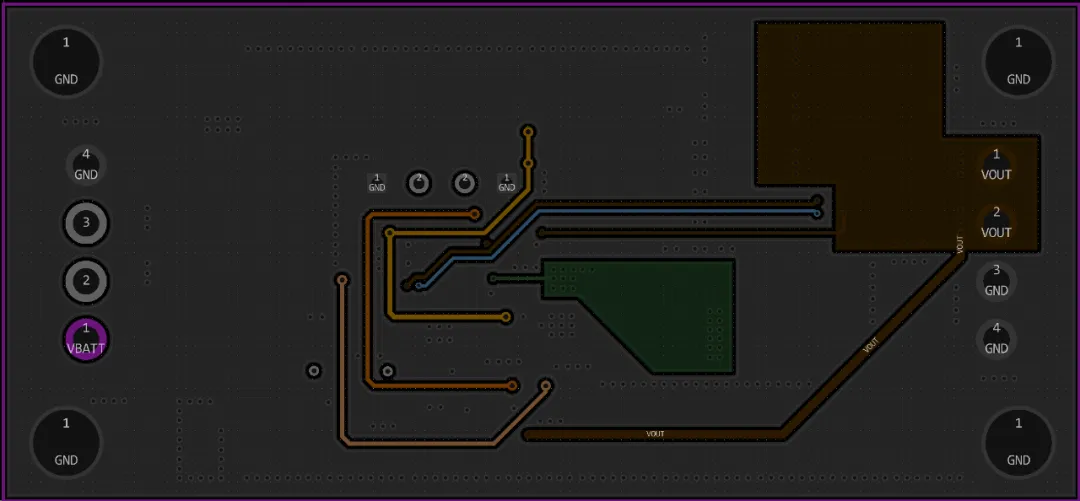
④ -Bottom
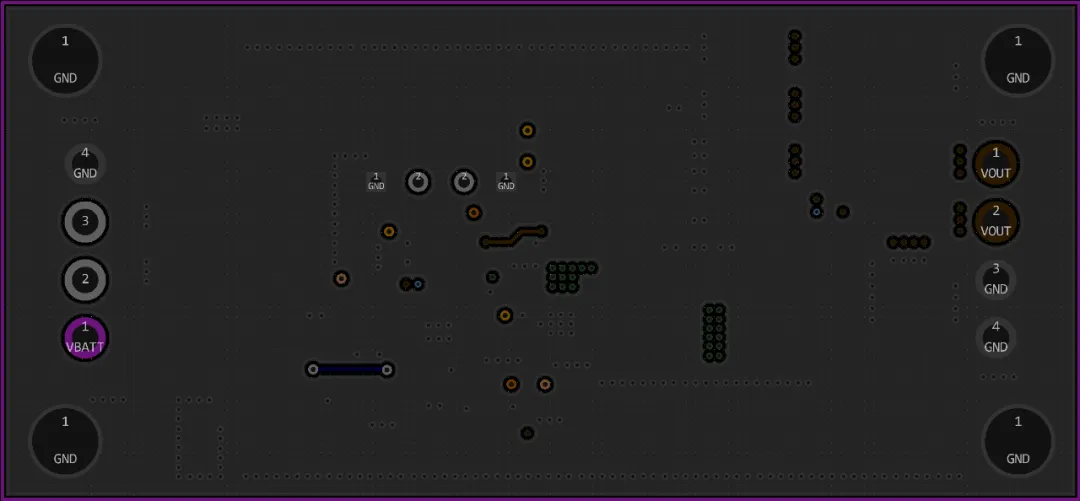
2.4.2 Zasilanie BUCK – kluczowa technologia projektowania płytki PCB
Pętle kondensatorów wejściowych i wyjściowych:
① Kondensatory wejściowe i wyjściowe zasilania BUCK powinny tworzyć minimalną pętlę, co ma istotny wpływ na EMC;
② C4 służy głównie do tłumienia szumów rezonansowych na zboczach narastających i opadających przebiegu przełączania.
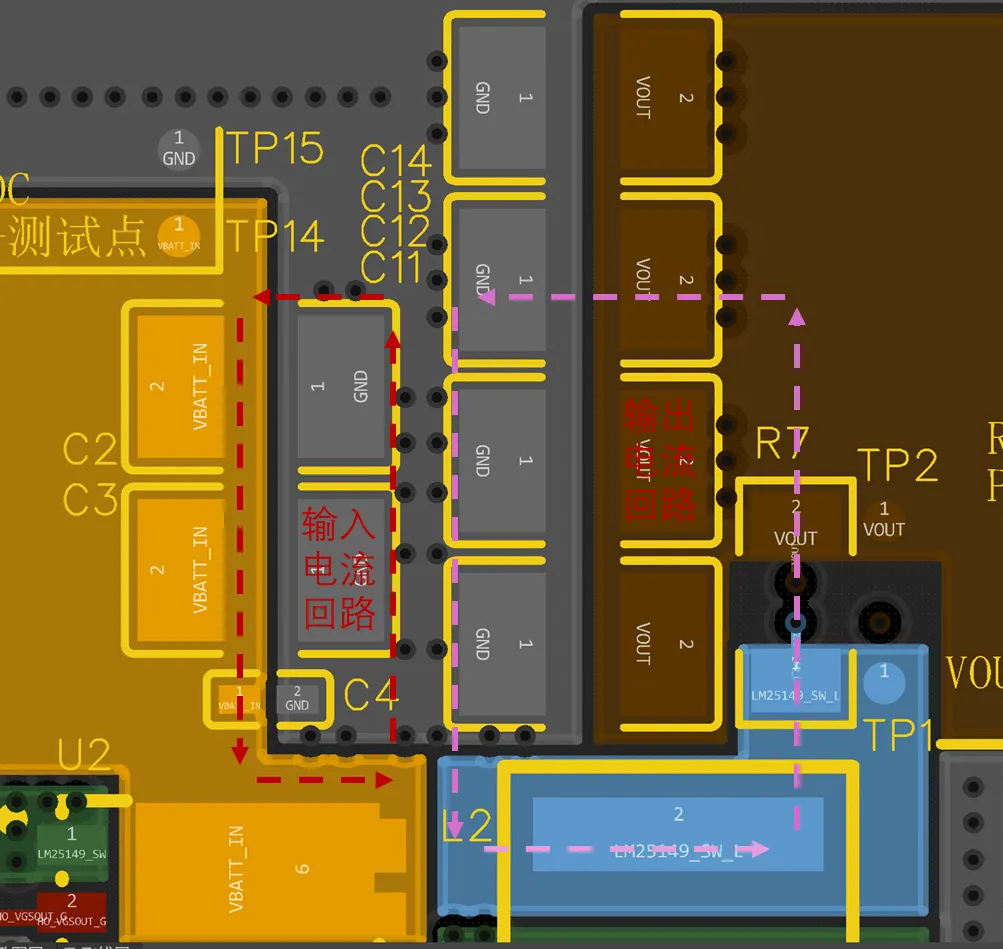
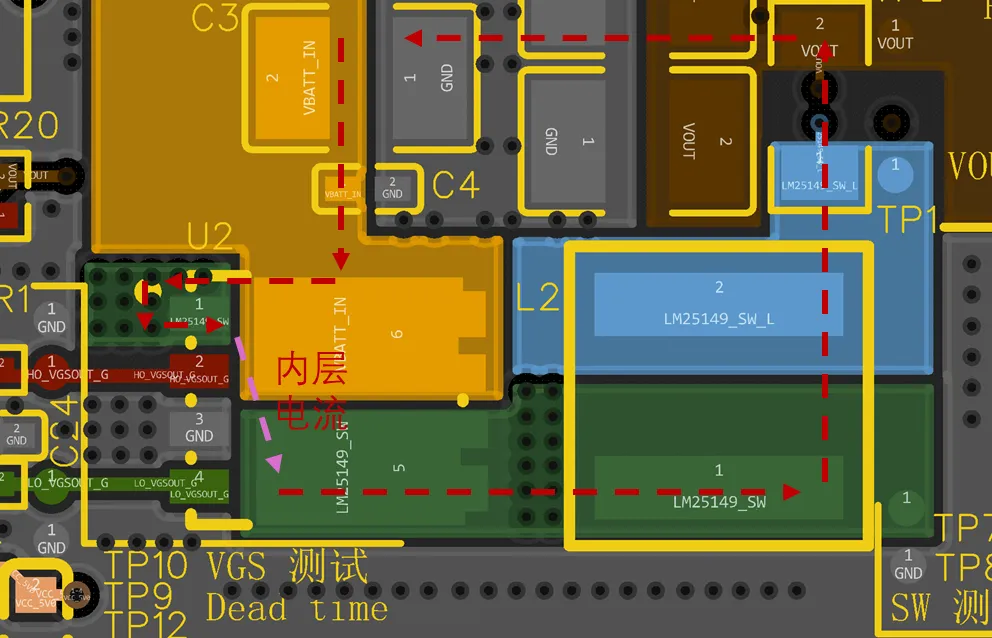
Pętle tranzystorów MOSFET i dławika:
① Zastosowanie scalonych dwóch tranzystorów MOSFET zmniejsza powierzchnię układu i koszty, wadą jest jednak to, że pętla Layout SW nie może być utrzymana na minimalnym poziomie;
② Punkt SW scalonego układu 2-w-1 MOSFET nie umożliwia śledzenia ścieżki na tej samej warstwie płytki PCB, konieczna jest zmiana warstwy, aby zapewnić ciągłość prądu mocy.
Prąd pomiarowy:
① Prąd próbkowania musi być różnicowy, a także wymagana jest odniesienia do płaszczyzny GND;
② Nie ma potrzeby kontrolowania impedancji i wyrównywania długości śladów, które powinny zachować minimalne rozstawienie określone w układzie.
FB - Sprzężenie zwrotne:
Rezystory i inne elementy powinny być umieszczone blisko pinów układu sterującego.
Chłodzenie i GND:
Urządzenia grzejne: tranzystory MOSFET, dławiki oraz rezystory pomiarowe mogą mieć odpowiednio zwiększoną przewodność cieplną w obszarze płytki, a dodanie przelotek GND może poprawić warunki odprowadzania ciepła z całej płyty.
projekt zasilacza BUCK pierwszego stopnia sterowanego domeną - podsumowanie
3.1 Rysunek 3D
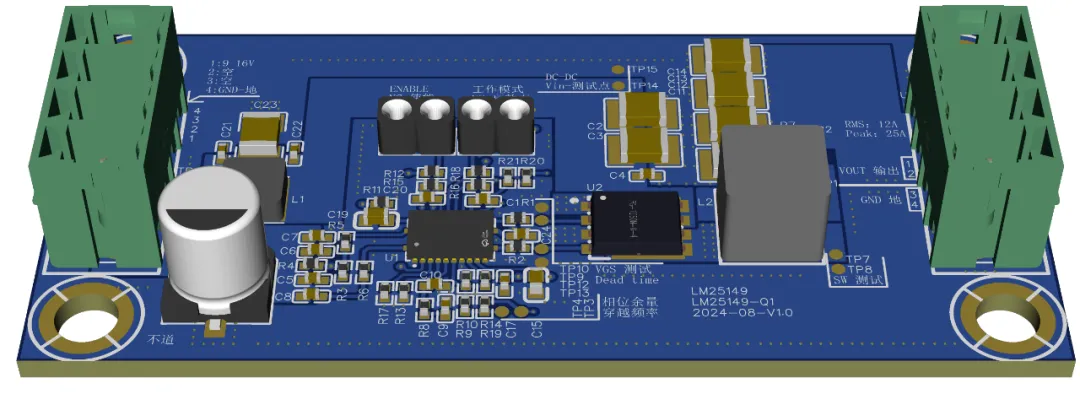
figura 3D-1
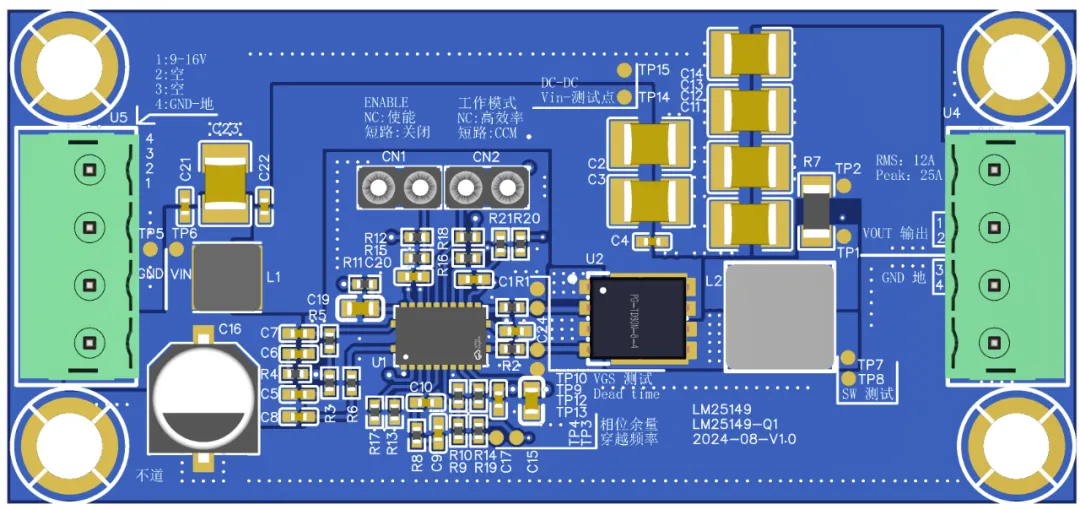
figura 3D-2
3.2 Podsumowanie projektu
① Projekt zasilania impulsowego zakłada konstrukcję 4-warstwową, grubość płytki PCB wynosi 1,6 mm, wymiary 30x65 mm;
② Prąd wyjściowy może spełniać maksymalny prąd chwilowy Qualcomm SA8295 o wartości 24 A i obsługuje zdolność trwałego wyjścia powyżej 10 A.
4- O firmie Codaca Elektronika
Codaca koncentruje się na niezależnych badaniach i rozwoju, projektowaniu oraz produkcji cewek, a model VSEB0660-1R0M jest odpowiedni do rozwoju i zastosowań na platformach Qualcomm. Posiada zalety techniczne takie jak wysoka wydajność cenowa, duża odporność na nasycenie prądem oraz niska generacja ciepła, a także wiodący w branży stosunek mocy do objętości. Codaca skupia się na badaniach i rozwoju technologii, innowacjach technologicznych, tworzy doskonałe produkty dla przemysłu cewek i wspiera rozwój oraz zastosowanie produktów elektronicznych.
5- Testy i weryfikacja
W celu dalszego testowania i weryfikacji prosimy o zapoznanie się z: 03- Dekodowanie projektu zasilania pierwszego etapu sterownika domenowego Qualcomm dla motoryzacji: analiza pomiarów testu wydajności .
[Odniesienie]
1.LM25149-Q1:ti.com.cn/product/cn/LM25149-Q1
2.BUK9K6R2-40E: https://www.nexperia.cn/product/BUK9K6R2-40E