
Быстрые ссылки

Растущий спрос на автоматизацию в производственных и сервисных отраслях стимулирует быстрое развитие гуманоидных роботов. С увеличением числа степеней свободы (DOF) и повышением скорости реакции на окружающую среду гуманоидные роботы становятся всё более сложными, что позволяет им более реалистично имитировать движения человека. Большее число степеней свободы означает, что для гуманоидных роботов требуется больше приводов двигателей, а индуктивности играют важную роль в системах управления двигателями, управления питанием и обработки сигналов гуманоидных роботов.

1- Основное применение индуктивностей в гуманоидных роботах
Индуктивности в гуманоидных роботах в основном используются в приводе двигателя, управлении питанием и обработке сигналов.
Привод двигателя: Высококлассные гуманоидные роботы на рынке обычно имеют 40–50 шарнирных двигателей, которые определяют свободу и гибкость робота. Дроссель обеспечивает плавное вращение двигателя за счёт накопления энергии и сглаживания тока, помогая системе управления двигателями гуманоидного робота осуществлять движение в сочленениях, регулировку положения и динамическое равновесие. Приводы двигателей и нагрузки высокой мощности требуют применения дросселей с высокими характеристиками насыщения по току и высокой токовой нагрузочной способностью для компенсации мгновенных колебаний тока. В то же время необходимо снижать потери для повышения эффективности системы и увеличения времени автономной работы от аккумулятора.
Управление энергией: Индуктивности являются основными компонентами преобразователей постоянного тока (таких как понижающие и повышающие схемы) в системах управления питанием, обеспечивая стабильное электропитание при различных напряжениях для процессоров ИИ, датчиков, модулей связи и т.д., оптимизируя распределение энергии и эффективность преобразования. Требуются низкое сопротивление постоянному току (DCR), высокая эффективность преобразования для снижения потерь мощности, высокий ток насыщения и хорошая температурная стабильность.
Обработка сигналов: В системах обработки сигналов индуктивности в основном используются для подавления высокочастотных шумов и ЭМИ, обеспечивая чистоту сигнала. Например, в системе восприятия они помогают реализовать восприятие и интерактивную обратную связь гуманоидных роботов с внешней средой. В системах связи и управления индуктивности используются в конструкции ЭМИ для обеспечения устойчивости к помехам радаров, камер, модулей беспроводной связи и других, а также повышения эксплуатационной устойчивости оборудования.
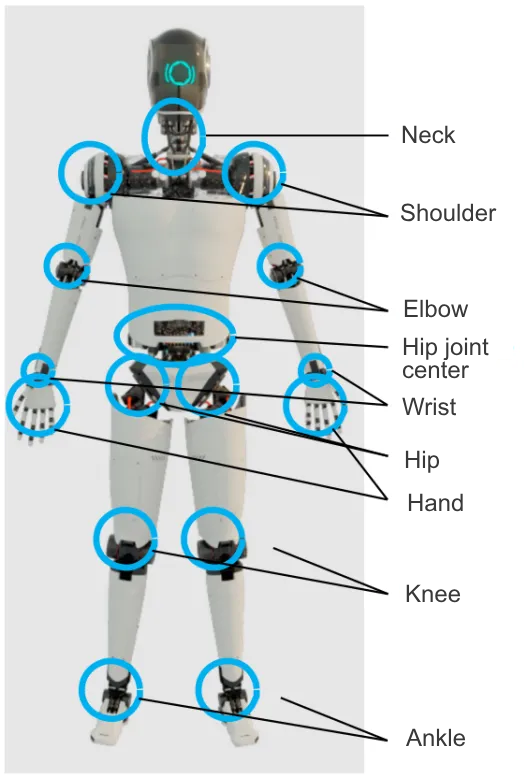
Рисунок 1: Основное расположение совместного двигателя гуманоидного робота (изображение от TI)
2- Спрос на катушки индуктивности для гуманоидных роботов
Электронная система гуманоидных роботов сложна, и для достижения точного управления движением и надежной связи невозможно обойтись без поддержки базовых компонентов, таких как катушки индуктивности. Технические характеристики гуманоидных роботов также определяют их высокие требования к характеристикам и конструкции изделий-индукторов. Основные требования следующие:
2.1 Миниатюризация и высокая мощность
Внутреннее пространство гуманоидных роботов чрезвычайно компактно, в нём интегрировано большое количество двигателей, вычислительных блоков (ЦПУ/ГПУ), датчиков и т.д., а плата питания (например, POL, преобразователь в точке нагрузки) должна быть миниатюризирована. Катушки индуктивности должны быть маленькими и лёгкими, чтобы соответствовать компактным конструкциям, а также обладать высокой плотностью мощности, чтобы обеспечить высокую мощность в небольшом объёме. Катушки индуктивности с литой или экранированной конструкцией способны выдерживать очень большие токи насыщения и токи повышения температуры при малых физических размерах, что крайне важно для достижения высокой мощности в ограниченном пространстве.
2.2 Высокая устойчивость к электромагнитным помехам
Внутренняя электромагнитная обстановка роботов является сложной: здесь присутствуют высокоскоростные цифровые цепи, сильные коммутационные помехи от драйверов двигателей и чувствительные датчики (такие как IMU и камеры). Использование неэкранированных катушек индуктивности создаёт сильное магнитное поле и становится источником электромагнитных помех, что серьёзно влияет на стабильность показаний датчиков и системы управления. Экранированная катушка индуктивности имеет минимальные утечки магнитного поля, эффективно снижает электромагнитные помехи и обеспечивает надёжную работу других компонентов системы. Поэтому более предпочтительными вариантами являются литые катушки индуктивности, катушки индуктивности с высоким током и другие силовые катушки индуктивности с магнитными экранированными структурами.
2.3 Высокий ток насыщения
Динамическая нагрузка робота изменяется резко, например, при внезапном пуске, движении или подъеме тяжелых объектов, ток двигателя и вычислительного блока мгновенно возрастает. Дроссель должен быть способен избегать магнитного насыщения при высоких токах (то есть значение индуктивности не должно резко падать), в противном случае силовой контур выйдет из-под контроля, что приведет к падению напряжения в системе и ее перезапуску. Следовательно, индуктивность должна обладать свойством "мягкого насыщения", то есть при приближении к току насыщения значение индуктивности должно медленно уменьшаться, а не падать скачком. Это обеспечивает буфер для системы управления питанием и повышает надежность системы.
2.4 Высокая устойчивость к вибрациям и ударам
Гуманоидные роботы часто перемещаются, подвергаются значительным механическим вибрациям, и индуктор должен обладать устойчивостью к вибрации и ударам; его паяные соединения должны быть прочными, а корпус и внутренняя катушка — выдерживать механические нагрузки. Индуктор монолитной конструкции полностью герметизирует катушку внутри магнитного материала, что обеспечивает чрезвычайно высокую механическую прочность и отличную устойчивость к ударам, поэтому он широко используется в системах гуманоидных роботов.
2.5 Адаптация к высокочастотным и высокотемпературным условиям
Индуктор должен обладать хорошими высокочастотными характеристиками, эффективно подавлять высокочастотные помехи, уменьшать пульсации и шумы, а также сохранять низкие потери энергии на высоких частотах для повышения эффективности преобразования.
Кроме того, дроссель должен сохранять стабильное значение индуктивности в условиях высокой температуры, иметь незначительное снижение значения Q и не подвержен быстрому ухудшению характеристик, чтобы обеспечить надежную работу индуктивности робота в течение длительного времени.
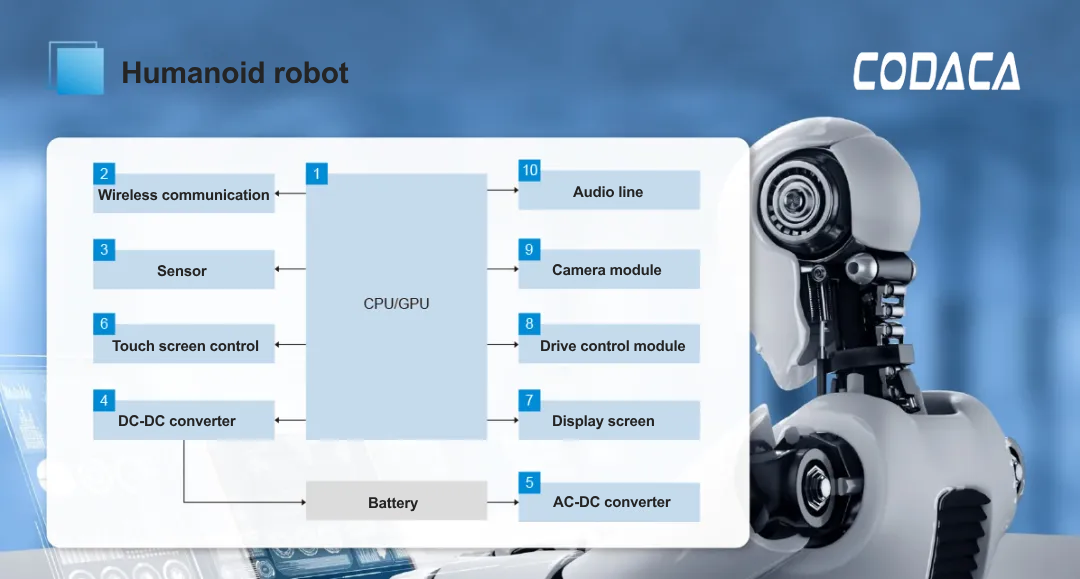
Рис. 2 Применение дросселя в человекоподобном роботе
3- Codaca решение с применением дросселя для человекоподобных роботов
В таких приложениях, как человекоподобные роботы, сочетающие высокую мощность, высокую эффективность, высокую надёжность, сложные условия электромагнитных помех и жёсткие механические условия, дроссели с высоким током, экранированные, с сердечником из сплавного порошка стали стали бесспорным основным выбором в цепях питания, особенно в источниках питания POL для ключевых вычислительных модулей и приводов суставных двигателей, благодаря своим комплексным эксплуатационным преимуществам. Их конструкция идеально сочетает три основные задачи: производительность, размер и надёжность.
Благодаря независимым исследованиям и технологическим инновациям Codaca предоставляет адаптивные решения катушек индуктивности для гуманоидных роботов. Компания запустила несколько категорий и моделей продукции, таких как экранированные магнитные высокотоковые силовые катушки индуктивности, тонкие и лёгкие литые катушки индуктивности и дроссели синфазных помех. Продукция способна обеспечивать различные электрические характеристики, чтобы соответствовать высокопроизводительным требованиям катушек индуктивности в различных сценариях применения гуманоидных роботов, и широко используется в модулях связи и навигации роботов, силовых модулях, модулях привода двигателей, управляющих платах роботов и других модулях.
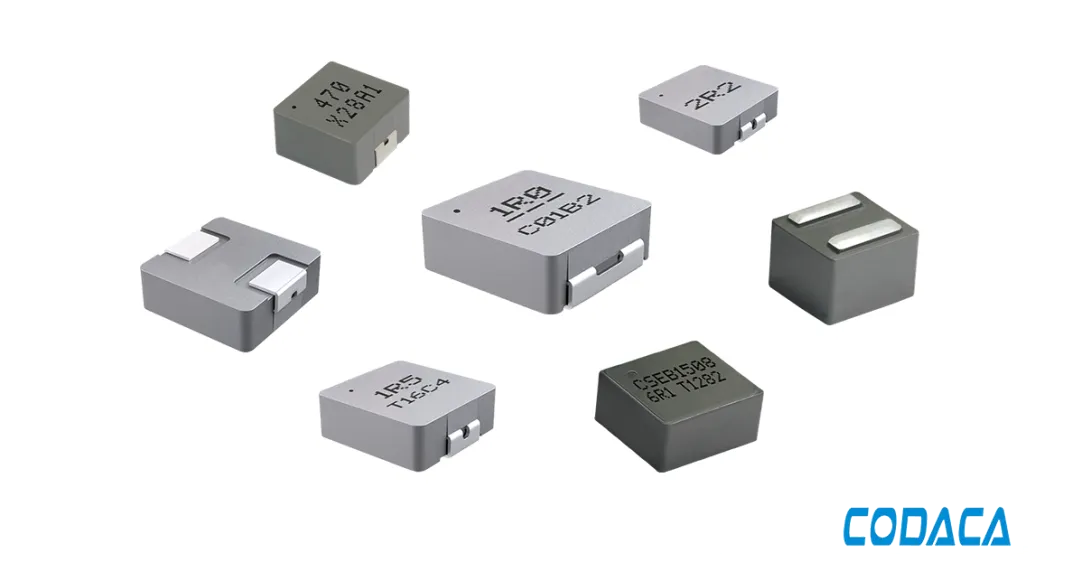
3.1 Компактная высокотоковая силовая катушка индуктивности
Компактные индукторы высокой мощности в основном используются в модулях постоянного тока (DC-DC) в системах привода двигателей и управления питанием гуманоидных роботов. Высокотоковый индуктор выполнен на базе разработанного Codaca собственного материла магнитного порошка с низкими потерями, который отличается высоким током насыщения, низкими потерями, высокой эффективностью преобразования и высокой рабочей температурой, что обеспечивает производительность и выносливость гуманоидных роботов. Максимальный ток индуктора может достигать 422 А, а рабочая температура — до 170 °C. В то же время продукт имеет экранированную магнитную конструкцию, обладающую высокой устойчивостью к электромагнитным помехам. Это полностью отвечает требованиям гуманоидных роботов к высокому току насыщения, высокой рабочей температуре и низкому уровню электромагнитных помех.
Рекомендуемые модели: CSBX , CSBA , CSCM , CSUT , CSCIL , и т. д.

3.2 Тонкие и лёгкие литые индукторы
Формованные катушки индуктивности в основном используются в модулях дисплеев человекоподобных роботов, модулях управления сенсорными экранами, модулях DC-DC и т.д. Компаундированные силовые дроссели используют низкопотерйный сплав порошка, самостоятельно разработанный CODACA, который отличается низкими потерями, высокой эффективностью, широким диапазоном рабочих частот и способен снижать уровень шума до ультранизкого. Продукт имеет тонкий и легкий дизайн (минимальный размер 2 мм), экономит место на печатной плате, подходит для монтажа с высокой плотностью, обладает высокой устойчивостью к механическим ударам и вибрациям (устойчивость к вибрации более 10G), что отвечает требованиям человекоподобных роботов к высокой мощности и высокой стабильности.
Рекомендуемые модели: CSAG , CSAC , CSAB , CSEB , CSHB , и т. д.
3.3 SMD силовой индуктор
Codaca SMD силовые индукторы в основном используются в модулях камер, аудиомодулях, модулях DC-DC и т.д., могут удовлетворить требования к малым габаритам индуктора, большому току, высокой эффективности преобразования и т.д.
Рекомендуемые модели: SPRHS , CSUS , ЦРХСМ , VCRHS , SPQ , и т. д.

Будучи ведущим поставщиком в области технологии магнитных компонентов, компания Codaca Electronics на протяжении 24 лет специализируется на разработке катушек индуктивности, и инженеры могут подобрать соответствующее значение индуктивности, номинальный ток, частоту переключения, размер изделия и т.д. в соответствии с конкретными требованиями к производительности каждой подсистемы человеческого робота для индукторов. За более подробной информацией обращайтесь к сотрудникам отдела продаж Codaca.