
Snabbvägar

Den ökande efterfrågan på automatisering inom tillverknings- och serviceindustrier driver den snabba utvecklingen av humanoida robotar. Med ökningen av rörelsefrihetsgrader (DOF) och förbättringen av svarshastighet i miljön har humanoida robotar blivit mer sofistikerade, vilket gör att de kan simulera mänskliga rörelser mer realistiskt. Högre rörelsefrihetsgrader innebär att humanoida robotar kräver fler motordrivsystem, och induktorer spelar en viktig roll i motorstyrning, effekthantering och signalbehandlingssystem för humanoida robotar.

1- Huvudanvändning av induktorer i humanoida robotar
Induktorer används främst i humanoida robotar för motordrift, effekthantering och signalbehandling.
Motordrift: Högpresterande humanoida robotar på marknaden har vanligtvis 40–50 ledmotorer, vilket avgör robotens rörelsefrihet och flexibilitet. Induktorn driver motorn att rotera jämnt genom energilagring och strömjämnare, vilket hjälper humanoidrobotens motorstyrning att uppnå ledrörelse, lägesjustering och dynamisk balans. Motordrivning och högeffektbelastningar kräver induktorer med hög mättningsspänningsegenskaper och hög strömcapacitet för att hantera ögonblickliga strömfluktuationer. Samtidigt är det nödvändigt att minska förluster för att förbättra systemets effektivitet och förlänga batterilivslängden.
Strömhantering: Induktorer är kärnkomponenter i DC-DC-omvandlare (såsom buck- och boost-kretsar) i effekthanteringssystem, vilket säkerställer en stabil strömförsörjning vid olika spänningar för AI-processorer, sensorer, kommunikationsmoduler m.m., samt optimerar energifördelning och omvandlingseffektivitet. Låg likströmsresistans (DCR), hög omvandlingseffektivitet för att minska effektförluster, hög mättningsspänning och god temperaturstabilitet krävs.
Signalbehandling: I signalbehandlingssystem används induktorer främst för att undertrycka högfrekvent brus och EMI, vilket säkerställer signalrenhet. Till exempel bidrar det i perceptionssystemet till att realisera humanoida robots uppfattning och interaktiva återkopplingar av den yttre miljön. I kommunikations- och styrningssystem används induktorer med EMI-design för att säkerställa störningsimmuniteten hos radar-, kamera-, trådlös kommunikation och andra moduler, samt förbättra utrustningens driftstabilitet.
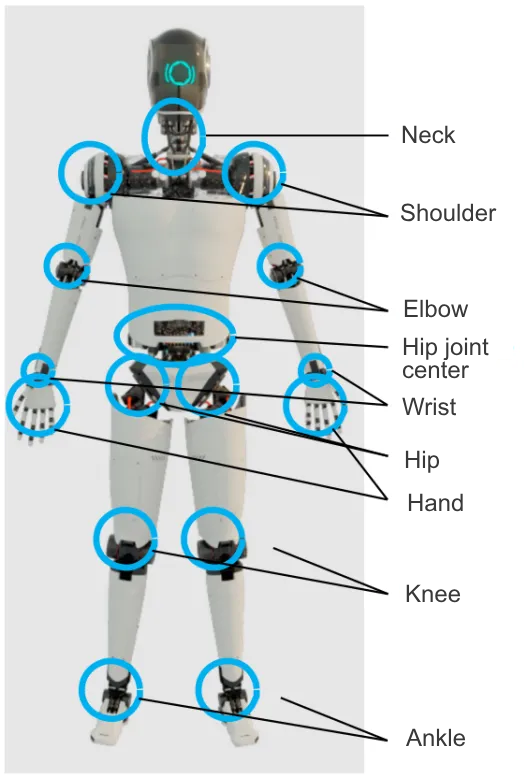
Figur 1: Den främsta platsen för den gemensamma motorn i den humanoida roboten (bild från TI)
2 - Efterfrågan på induktorer för humanoida robotar
Det elektroniska systemet i humanoida robotar är komplext, och för att uppnå exakt rörelsestyrning och tillförlitlig kommunikation krävs stöd från grundläggande komponenter såsom induktorer. De tekniska egenskaperna hos humanoida robotar bestämmer också deras höga krav på prestanda och strukturell design av induktorprodukter. Kraven är främst följande:
2.1 Miniatyrisering och hög effekttäthet
Det inre utrymmet i humanoidrobotar är extremt kompakt, integrerat med ett stort antal motorer, beräkningsenheterna (CPU/GPU), sensorer etc., och strömförsörjningskretskortet (såsom POL, point-of-load-omvandlare) måste vara miniatyriserat. Spolar måste vara små och lätta för att passa in i kompakta konstruktioner, samtidigt som de har hög effekttäthet för att uppnå hög effekthantering på liten yta. Spolar med formad eller skärmad konstruktion kan tåla mycket stora mättningströmmar och temperaturstegringströmmar i en liten fysisk storlek, vilket är avgörande för att uppnå hög effektutmatning på begränsat utrymme.
2.2 Stark prestanda mot elektromagnetiska störningar
Det interna elektromagnetiska miljön i robotar är komplex, med höghastighetsdigitala kretsar, stark switchningsbrus från motordrivare och känsliga sensorer (till exempel IMU och kameror). Användning av oskärmade induktorer genererar ett starkt magnetfält och blir en källa till elektromagnetisk störning, vilket allvarligt kan påverka stabiliteten i sensoravläsningar och styrsystem. Den skärmade induktorn har minimal magnetläckage, reducerar effektivt elektromagnetiska störningar och säkerställer tillförlitlig drift hos andra komponenter i systemet. Därför är formsprutade induktorer, kraftinduktorer för hög ström och andra kraftinduktorer med magnetiskt skärmade strukturer mer idealiska val.
2.3 Hög mättnadsström
Den dynamiska belastningen på roboten förändras kraftigt, till exempel vid plötslig igångsättning, rörelse eller lyft av tunga föremål, vilket gör att motorns och beräkningsenhetens ström ögonblickligen skjuter i höjden. Induktorn måste kunna undvika magnetisk mättnad vid höga strömmar (det vill säga att induktansvärdet inte minskar kraftigt), annars kommer effektslingan att tappa kontrollen, vilket leder till att systemspänningen kollapsar och startas om. Därför måste induktansen ha egenskaper av "mjuk mättnad", det vill säga att när man närmar sig mättningsströmmen minskar induktansvärdet långsamt i stället för att falla som från en klippa. Detta ger en buffert för effektreglersystemet och förbättrar systemets tillförlitlighet.
2.4 Stark prestanda mot vibrationer och stötar
Humanoida robotar rör sig ofta och utsätts för mycket mekanisk vibration, och induktorn måste därför ha vibrations- och stötvårdighet. Solderfogarna bör vara fasta, och skalet samt den interna spolen måste klara mekanisk påfrestning. Induktorn med formad struktur fullständigt solidifierar spolen inuti magnetmaterialet, vilket ger extremt hög mekanisk hållfasthet och mycket god stötvårdighet, varför den används allmänt i humanoidrobotssystem.
2,5 Anpassa till högfrekventa och högtemperaturmiljöer
Induktorn måste ha goda egenskaper vid högfrekvens, kunna effektivt undertrycka högfrekvent störning, minska vattenböljor och brus samt bibehålla låga energiförluster vid högfrekvens för att förbättra omvandlingseffektiviteten.
Dessutom bör induktorn kunna bibehålla ett stabilt induktansvärde i en högtemperatursmiljö, ha en liten minskning av Q-värdet och inte lätt försämras i prestanda, för att säkerställa att induktansprestandan hos roboten är tillförlitlig vid långvarigt arbete.
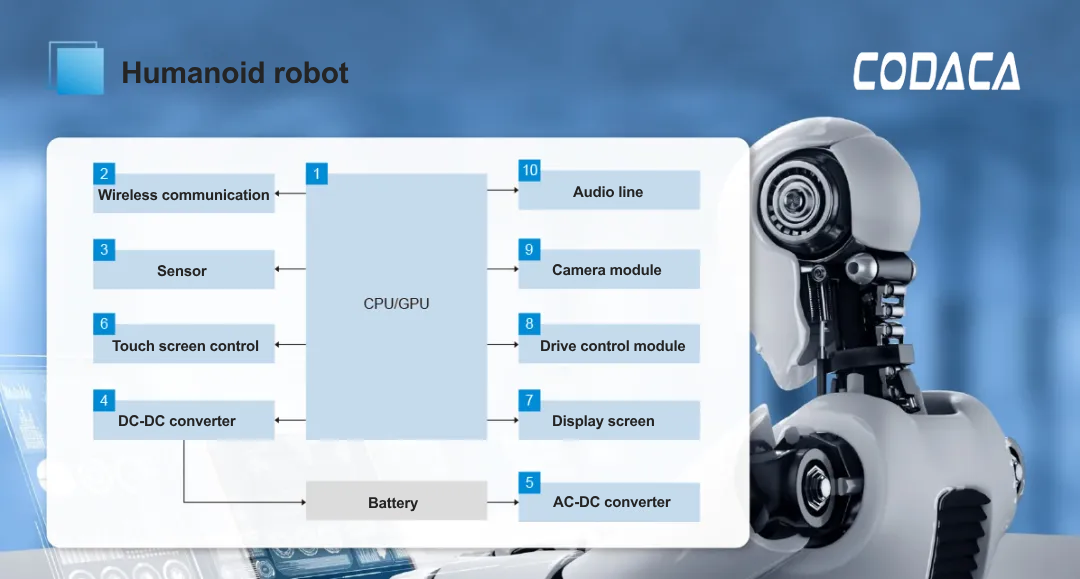
Fig. 2 Applikation av induktor i humanoidrobot
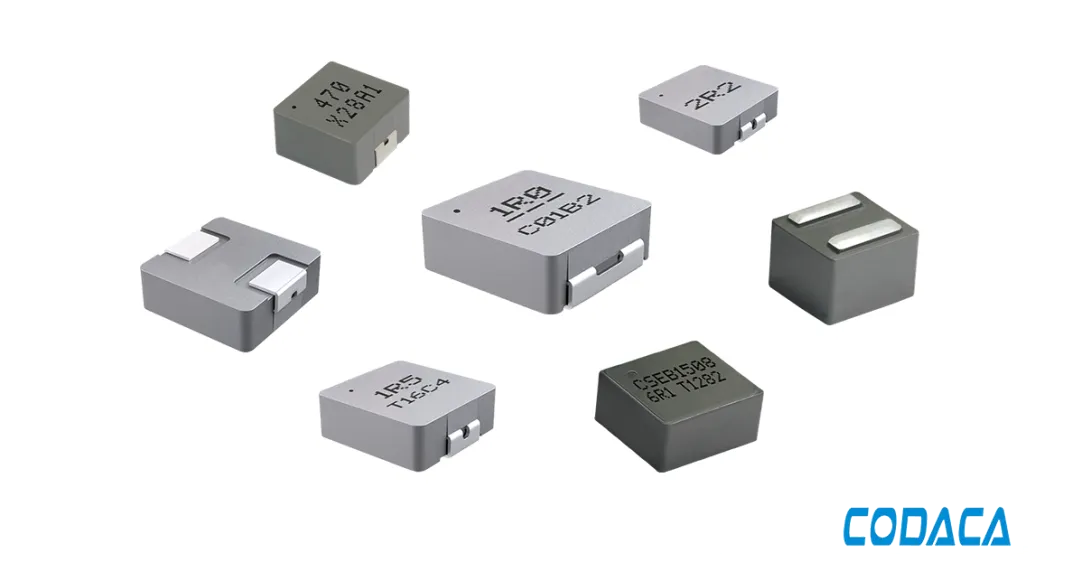
3- Codaca induktorslösning för humanoidrobotar
I tillämpningar som humanoidrobotar, där man kombinerar hög effekttäthet, hög verkningsgrad, hög tillförlitlighet, komplexa EMC-miljöer och hårda mekaniska förhållanden, har högströms, skärmade induktorer med legeringspulverkärnor blivit den oomtvistade standardvalet i strömförsörjningskretsar, särskilt POL-strömadapter för kärnberäkningsenheter och motorer i leder, tack vare sina omfattande prestandafördelar. Dess design balanserar perfekt de tre centrala utmaningarna prestanda, storlek och tillförlitlighet.
Genom självständig forskning och utveckling samt teknologisk innovation erbjuder Codaca anpassade induktorlösningar för humanoida robotar, och företaget har lanserat flera kategorier och modeller av produkter såsom magnetiskt skärmade högströmskraftinduktorer, tunna och lätta formgjutna induktorer samt gemensammodus chokar. Det kan erbjuda olika elektriska egenskaper för att uppfylla högprestandskraven på indukторer i olika scenarier för humanoida robotar och används brett inom robotarkommunikations- och navigationsmoduler, kraftmoduler, motorstyrningsmoduler, robotkontrollkort och andra moduler.
3.1 Kompakt högströmskraftinduktor
Med en effekt av högst 50 W används huvudsakligen i DC-DC-moduler i humanoidrobotars motorstyrning och energihanteringssystem. Högströmsinduktorn använder det lågförlust metallmagnetiska pulverkärnmaterial som oberoende utvecklats av Codaca, vilket har egenskaper som hög mättningström, låg förlust, hög omvandlingseffektivitet och hög driftstemperatur för att säkerställa prestanda och driftstid hos humanoidrobotar. Högströmsinduktorn kan klara upp till 422 A och driftstemperatur kan nå upp till 170 °C. Samtidigt använder produkten en magnetiskt skärmad struktur, vilket ger stark prestanda mot elektromagnetisk störning. Den uppfyller helt behoven hos humanoidrobotar vad gäller hög mättningström, hög driftstemperatur och låg elektromagnetisk störning.
Rekommenderade modeller: CSBX , CSBA , CSCM , CSUT , CSCIL , etc.

3,2 Tunna och lätta formgjutna induktorer
Molerade induktorer används främst i moduler för humanoidrobotdisplay, moduler för beröringskänslig skärmkontroll, DC-DC-moduler etc. Formade effektchokar använder det lågförlustiga legeringspulver som utvecklats självständigt av CODACA, vilket ger låga förluster, hög verkningsgrad, brett tillämpningsfrekvensområde och kan minska bruset till ultralåga nivåer. Den har en tunn och lätt design (minsta storlek 2 mm), sparar plats på kretskortet, är lämplig för montering med hög täthet och har stark motståndskraft mot mekaniska stötar och vibrationer (vibrationsmotstånd mer än 10G), vilket uppfyller kraven från humanoidrobotar på hög effekttäthet och hög stabilitet.
Rekommenderade modeller: CSAG , CSAC , CSAB , CSEB , CSHB , etc.
3,3 SMD-effektinduktor
Codaca SMD-effektinduktorer används främst i kameramoduler, ljudmoduler, DC-DC-moduler etc., och kan uppfylla behoven av liten induktorstorlek, stor ström, hög omvandlingseffektivitet etc.
Rekommenderade modeller: SPRHS , CSUS , CRHSM , VCRHS , SPQ , etc.

Som en ledande leverantör inom magnetkomponentteknologi har Codaca Electronics i 24 år fokuserat på utveckling av induktorer, och ingenjörer kan anpassa lämpliga värden för induktans, märkström, switchfrekvens, produktstorlek etc. enligt de specifika prestandakraven för varje delsystem i en humanoid robot. Kontakta Codaca försäljningspersonal för mer detaljerad information.