
Hızlı Bağlantılar

İmalat ve hizmet endüstrilerinde otomasyona olan artan talep, insana benzer robotların hızlı gelişimini teşvik etmektedir. Serbestlik derecelerinin (DOF) artması ve çevreye karşı tepki hızının iyileştirilmesiyle birlikte, insana benzer robotlar daha karmaşık hale gelmiş ve insan hareketlerini daha gerçekçi bir şekilde taklit edebilir hale gelmiştir. Daha yüksek serbestlik dereceleri, insana benzer robotların daha fazla motor sürücüye ihtiyaç duyması anlamına gelmekte olup, bobinlerin insana benzer robotlarda motor kontrol, güç yönetimi ve sinyal işleme sistemlerinde önemli bir rol oynamaktadır.

1- İnsana benzer robotlarda bobinlerin temel uygulamaları
Bobinler, insana benzer robotlarda özellikle motor sürücü, güç yönetimi ve sinyal işleme alanlarında kullanılmaktadır.
Motor sürücü: Piyasadaki yüksek uç humanoid robotlar genellikle 40-50 adet eklemleri hareket ettiren motorlara sahiptir ve bu motorlar robotun hareket kabiliyeti ve esnekliğini belirler. Endüktör, enerji depolama ve akımın yumuşak akışını sağlayarak motora hareket sağlayarak, humanoid robot motor kontrol sisteminin eklem hareketlerini, pozisyon ayarlamalarını ve dinamik dengesini gerçekleştirmesine yardımcı olur. Motor sürüşleri ve yüksek güç yükleri, ani akım dalgalanmalarına karşı başa çıkmak için yüksek doyma akım özelliklerine ve yüksek akım taşıma kapasitesine sahip endüktörler gerektirir. Aynı zamanda, sistem verimliliğini artırmak ve pil ömrünü uzatmak için kayıpları azaltmak gerekir.
Güç yönetimi: İndüktörler, güç yönetim sistemlerindeki DC-DC dönüştürücülerin (örneğin buck ve boost devreleri) temel bileşenleridir ve yapay zekâ işlemcileri, sensörler, haberleşme modülleri vb. için farklı gerilim seviyelerinde kararlı güç sağlayarak enerji dağıtımını ve dönüşüm verimliliğini optimize eder. Düşük doğru akım direnci (DCR), güç kaybını azaltmak için yüksek dönüşüm verimliliği, yüksek doyum akımı ve iyi sıcaklık stabilitesi gereklidir.
Sinyal işleme: Sinyal işleme sistemlerinde indüktörler özellikle yüksek frekanslı gürültüyü ve EMI'ı bastırmak için kullanılır ve sinyal saflığını sağlar. Örneğin algı sisteminde, humanoid robotların dış çevre üzerinde algılama ve etkileşimli geri bildirim sağlamasını gerçekleştirmeye yardımcı olur. Haberleşme ve kontrol sistemlerinde ise indüktörler, radar, kamera, kablosuz haberleşme ve diğer modüllerin girişime karşı dayanıklılığını sağlamak amacıyla EMI tasarımını kullanır ve ekipmanın çalışma stabilitesini artırır.
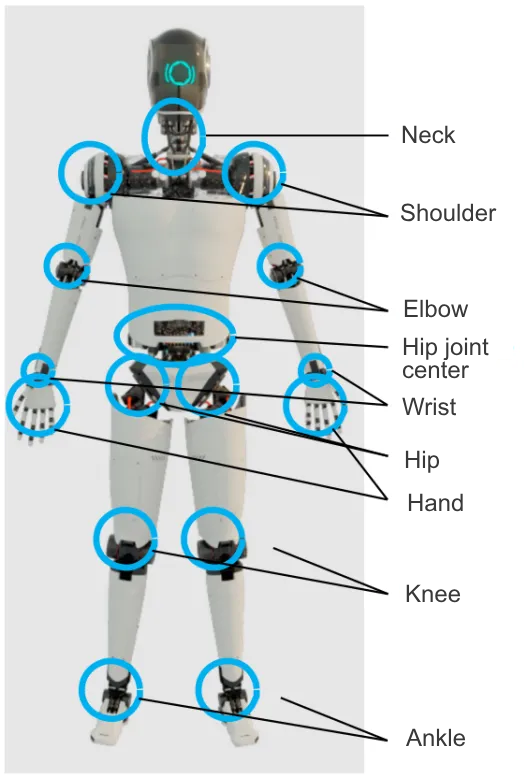
Şekil 1: İnsansı robotun eklem motorunun ana konumu (TI'den alınan resim)
2- İnsansı robotlar için indüktör talebi
İnsansı robotların elektronik sistemi karmaşıktır ve hassas hareket kontrolüne ve güvenilir iletişime ulaşmak, indüktörler gibi temel bileşenlerin desteğinden ayrılamaz. İnsansı robotların teknik özellikleri aynı zamanda indüktör ürünlerinin performansı ve yapısal tasarımı konusunda yüksek gereksinimleri olduğunu belirler. Bu gereksinimler başlıca şunlardır:
2.1 Küçültme ve yüksek güç yoğunluğu
İnsanoid robotların iç boşluğu son derece kompakt olup, bir dizi motor, hesaplama birimleri (CPU/GPU), sensörler vb. içermektedir ve güç kaynağı devre kartı (örneğin POL, yük noktasına göre dönüştürücü) küçültülmelidir. Bobinlerin, kompakt yapısal tasarımlara uyum sağlayabilmesi için küçük ve hafif olması gerekirken aynı zamanda yüksek güç yoğunluğuna sahip olmalıdır, böylece küçük bir alanda yüksek güç işleme sağlanabilir. Kalıplı veya kalkanlı yapıya sahip bobinler, küçük fiziksel boyutlarda çok yüksek doygunluk akımlarını ve sıcaklık artışı akımlarını karşılayabilir; bu, sınırlı bir alanda yüksek güç çıkışı elde etmek için hayati öneme sahiptir.
2.2 Güçlü elektromanyetik girişim engelleme performansı
Robotların iç elektromanyetik ortamı karmaşıktır ve yüksek hızlı dijital devreler, motor sürücülerinden kaynaklanan güçlü anahtarlama gürültüsü ile hassas sensörler (örneğin IMU'lar ve kameralar) içerir. İzole edilmemiş endüktörlerin kullanılması güçlü bir manyetik alan oluşturur ve bu durum, sensör okumalarının ve kontrol sisteminin kararlılığını ciddi şekilde etkileyebilecek bir elektromanyetik girişim kaynağı haline gelir. Koruyuculu endüktörler ise minimum düzeyde manyetik sızıntıya sahiptir ve elektromanyetik girişimleri etkili bir şekilde azaltarak sistemdeki diğer bileşenlerin güvenilir çalışmasını sağlar. Bu nedenle, kalıp endüktörler, yüksek akım güç endüktörleri ve manyetik kalkan yapıya sahip diğer güç endüktörleri daha ideal seçimlerdir.
2.3 Yüksek doyma akımı
Robotun dinamik yükü, aniden harekete geçme, çalışma veya ağır nesneleri kaldırma gibi durumlarda büyük ölçüde değişir ve bu sırada motor ile işlem biriminin akımı ani olarak yükselir. Endüktör, yüksek akımlarda manyetik doyuma ulaşmayı engelleyebilmelidir (yani endüktans değeri keskin şekilde düşmemelidir). Aksi takdirde güç döngüsü kontrol dışı hale gelir, sistem voltajı çöker ve yeniden başlatma gerçekleşir. Bu nedenle endüktansın 'yumuşak doyum' özelliklerine sahip olması gerekir; yani doyum akımına yaklaşıldığında endüktans değerinin uçurum gibi değil, yavaşça azalması gerekir. Bu durum, güç kontrol sistemi için bir tampon sağlar ve sistemin güvenilirliğini artırır.
2.4 Yüksek titreşim ve darbeye dayanıklılık
İnsansı robotlar sık sık hareket eder, mekanik titreşime sahiptir ve indüktörün titreşime ve şoka dayanıklı olması, lehim eklemeleri sağlam olmalı ve dış kap ile iç bobin mekanik gerilmelere dayanabilmelidir. Kalıplı yapıdaki indüktör, bobini manyetik malzeme içinde tamamen sertleştirerek son derece yüksek mekanik dayanım sağlar ve çok güçlü darbe direnci sunar; bu yüzden insansı robot sistemlerde yaygın olarak kullanılır.
2.5 Yüksek frekans ve yüksek sıcaklık ortamlarına uyum
İndüktör iyi yüksek frekans özelliklerine sahip olmalıdır; yüksek frekanslı gürültüyü etkili bir şekilde bastırabilmeli, dalgalanmayı ve gürültüyü azaltabilmeli ve yüksek frekanslarda düşük enerji kaybı koruyarak dönüşüm verimini artırmalıdır.
Ayrıca, indüktör yüksek sıcaklık ortamında endüktans değerini sabit tutabilmeli, Q değerinin azalması minimum olmalı ve performansının kolay bozulmamalıdır, böylece robotun uzun süreli çalışma boyunca endüktans performansının güvenilir olması sağlanır.
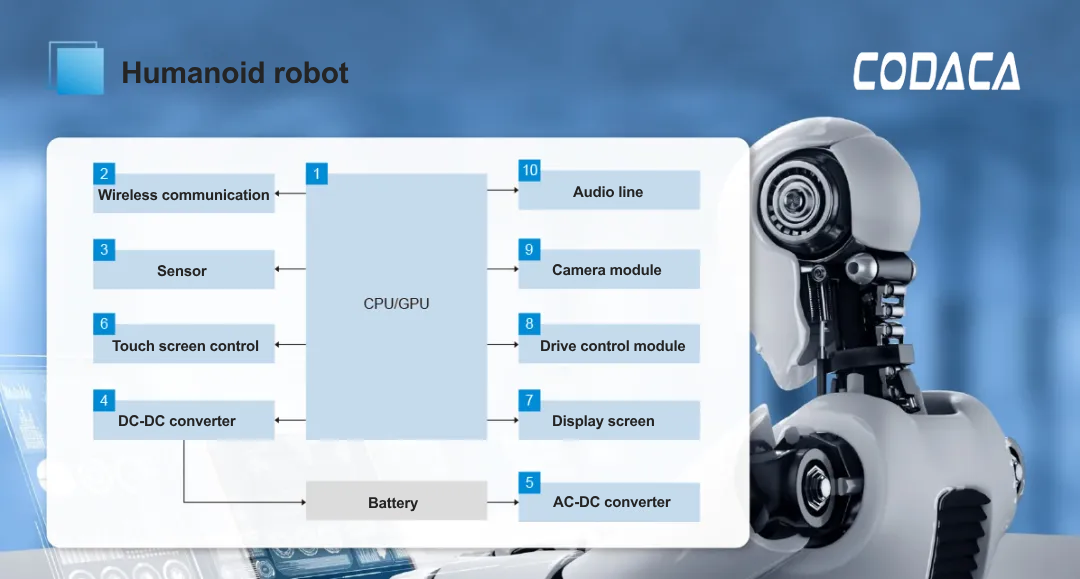
Şek.2 İnsansı robotta indüktör uygulaması
3- Codaca i̇nsansı robotlar için indüktör çözümü
Yüksek güç yoğunluğu, yüksek verimlilik, yüksek güvenilirlik, karmaşık EMI ortamları ve sert mekanik koşulların bir araya gelmesi gibi uygulamalarda, yüksek akım taşıma kapasitesine sahip, ekranlı, alaşımlı toz çekirdekli indüktörler, özellikle merkezi hesaplama birimleri ve eklem motor sürücüler için POL güç kaynaklarında, üstün performans avantajları nedeniyle güç devrelerinde tartışmasız ana akım seçeneği haline gelmiştir. Tasarımı performans, boyut ve güvenilirlik gibi üç temel zorluk arasında mükemmel bir denge kurar.
Kendi başına yapılan araştırma ve teknolojik yenilik sayesinde Codaca, insansı robotlar için uyarlanabilir indüktör çözümleri sunmaktadır ve manyetik kalkanlı yapıya sahip yüksek akım güç indüktörleri, ince ve hafif kalıp indüktörler ile common mode şokler gibi çok sayıda kategori ve model ürünleri piyasaya sürmüştür. Farklı senaryolardaki insansı robotların yüksek performans gereksinimlerini karşılamak üzere farklı elektriksel karakteristikler sağlayabilir ve robot iletişim ile navigasyon modülleri, güç modülleri, motor sürüş modülleri, robot kontrol panoları ve diğer modüllerde yaygın olarak kullanılmaktadır.
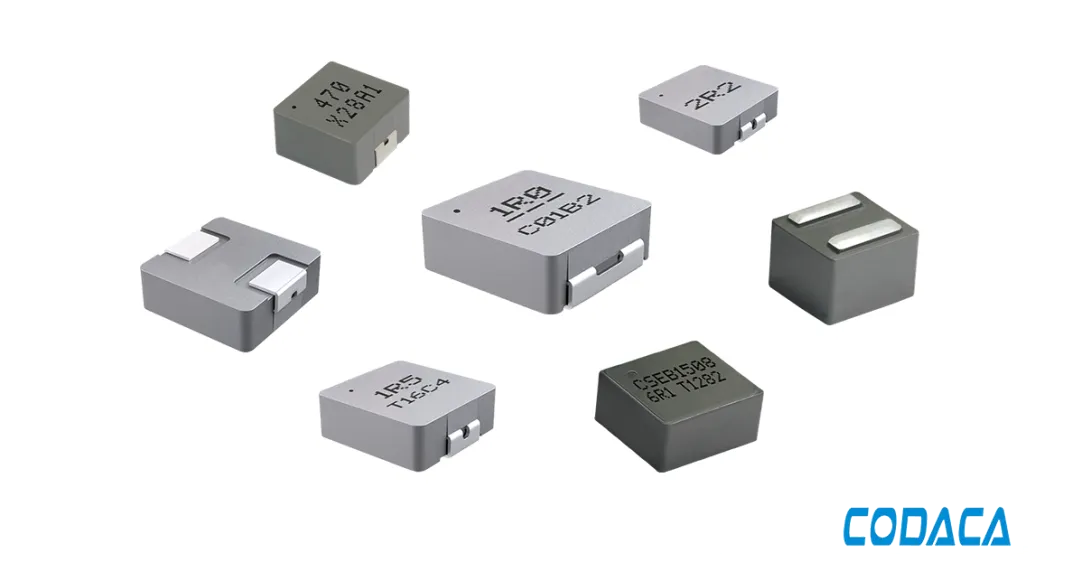
3.1 Compact yüksek akım güç indüktörü
Kompakt yüksek akımlı güç indüktörleri i̇nsansı robot motor sürüşü ve güç yönetim sistemlerindeki DC-DC modüllerinde mainly kullanılır. Yüksek akımlı indüktör, Codaca tarafından bağımsız olarak geliştirilen düşük kayıplı metal manyetik toz çekirdek malzemesini kullanır ve yüksek doyma akımı, düşük kayıp, yüksek dönüşüm verimliliği ve yüksek çalışma sıcaklığı özelliklerine sahiptir; bu da insansı robotların performansını ve dayanıklılığını sağlar. Yüksek akım indüktörü 422A'ye kadar çıkabilir ve çalışma sıcaklığı 170°C'ye kadar ulaşabilir. Aynı zamanda ürün manyetik kalkanlı yapıya sahiptir ve güçlü elektromanyetik girişime karşı koruma sağlar. İnsansı robotların yüksek doyma akımı, yüksek çalışma sıcaklığı ve düşük elektromanyetik girişim ihtiyaçlarını tamamen karşılar.
Önerilen Modeller: CSBX , CSBA , CSCM , CSUT , CSCIL , vb.

3.2 İnce ve Hafif Moldlanmış Endüktörler
Kalıplanmış indüktörler insanoid robot ekran modülleri, dokunmatik ekran kontrol modülleri, DC-DC modülleri vb. alanlarda mainly kullanılır. Kalıplanan güç şokleri, CODACA tarafından bağımsız olarak geliştirilen düşük kayıplı alaşımlı tozu kullanır ve bu malzeme düşük kayıplı, yüksek verimli, geniş uygulama frekansına sahip olup gürültüyü ultra düşük seviyeye indirebilir. İnce ve hafif bir tasarıma sahiptir (minimum boyut 2 mm), PCB alanından tasarruf sağlar, yüksek yoğunluklu montaj için uygundur ve mekanik şoka ve titreşime karşı güçlü dirence sahiptir (titreşim direnci 10G'den fazladır), insanoid robotların yüksek güç yoğunluğu ve yüksek stabilite ihtiyaçlarını karşılar.
Önerilen Modeller: CSAG , CSAC , CSAB , CSEB , CSHB , vb.
3.3 SMD güç endüktifi
Codaca SMD güç endüktifleri kamera modülleri, ses modülleri, DC-DC modülleri vb. alanlarda mainly kullanılır ve küçük endüktif boyutu, yüksek akım, yüksek dönüşüm verimliliği gibi ihtiyaçları karşıyabilir.
Önerilen Modeller: SPRHS , CSUS , CRHSM , VCRHS , SPQ , vb.

Manyetik bileşen teknolojisi alanında öncü bir tedarikçi olarak Codaca Electronics, 24 yıldır endüktör geliştirme üzerine odaklanmaktadır ve mühendisler humanoid robotların her bir alt sisteminin özel performans gereksinimlerine göre uygun endüktans değerini, anma akımını, anahtarlama frekansını, ürün boyutunu vb. eşleştirebilir. Daha ayrıntılı bilgi için lütfen Codaca satış personeliyle iletişime geçin.