

Ishlab chiqarish va xizmat ko'rsatish sohalarida avtomatlashtirishga bo'lgan talab o'sib bora-yotgani antropomorf robotlarning tezkor rivojlanishini rag'batlantirmoqda. Harakat doirasining (DOF) oshishi hamda muhitga reaksiya tezligining yaxshilanishi bilan antropomorf robotlar inson harakatlarini yanada haqiqiy tarzda simulyatsiya qilish imkonini beruvchi murakkab tuzilmaga ega bo'lib bormoqda. Yuqori harakat doirasi antropomorf robotlarning ko'proq elektr haydovchilarga ehtiyojini anglatadi va induktorlar antropomorf robotlarning dvigatel boshqaruv, quvvat boshqaruv hamda signallarni qayta ishlash tizimlarida muhim rol o'ynaydi.

1- Antropomorf robotlarda induktorlarning asosiy dasturiy sohasi
Induktorlar asosan antropomorf robotlarda dvigatel haydash, quvvatni boshqarish hamda signallarni qayta ishlashda qo'llaniladi.
Dvigatel haydash: Bazar dastisundagi yuqori klass humanoid robotlar, qaydanda 40-50 artikulyatsion motorlarga ega, robotning azadligi va gibkosliligini belgilaydi. Induktor energiyaning toplanishi va tokning gladkiliqi arqali motorning gladki dövretishini tädrik ededi, humanoid robot motor kontrol sistemanin joint harket, vaziyyat tanzimlanishi we dinamik balansyn ulgamaq üçin kömek ededi. Motor tädriklar we yuqari quwwat yükler aniden tok fluktuatsiyalaryna tuýanmak üçin nasys tok xüsusiýeti we ýokary tok tasymalylygy bar induktor talab edýär. Şonuň bilen zatlary azaltmak, sistemanyň effektivligini artyrmak we batarkanyň ömüri uzartmak talap edilýär.
Quvvat boshqaruv: Induktorlar oqimni boshqarish tizimlaridagi DC-DC konvertorlarning (masalan, buck va boost sxemalari) asosiy komponentlari bo'lib, AI protsessorlari, sensorlar, aloqa modullari va boshqalarga turli kuchlanishdagi barqaror quvvat ta'minotini taqdim etadi, shu bilan birga energiya taqsimoti va aylantirish samaradorligini optimallashtiradi. Kam doimiy tok qarshiligi (DCR), quvvat yo'qotishni kamaytirish uchun yuqori aylantirish samaradorligi, yuqori to'yinish toki hamda yaxshi harorat barqarorligi talab etiladi.
Signalni qayta ishlash: Signalni qayta ishlash tizimlarida induktorlar asosan yuqori chastotali shovqin va EMI ni so'ndirish uchun ishlatiladi, bu esa signallarning sof ekanligini ta'minlaydi. Masalan, idrok etish tizimida insonga o'xshash robotlarning tashqi muhitni idrok etishini va o'zaro aloqada fikr almashish imkonini beradi. Aloqa va boshqaruv tizimlarida induktorlar radar, kamera, simsiz aloqa kabi modullarning to'siqqa chidamli bo'lish qobiliyatini ta'minlash maqsadida EMI dizaynidan foydalanadi hamda uskunalar ishlashining barqarorligini oshiradi.
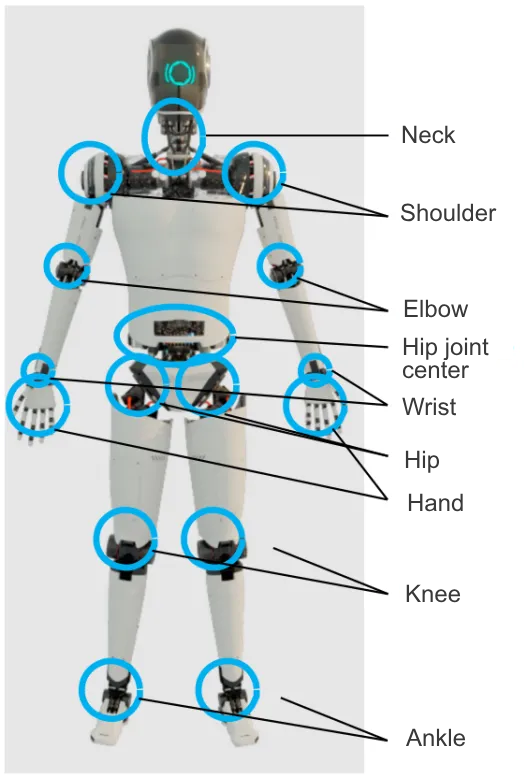
1- rasm: Gumanoid robotning shar'li motorinın asaslıq orınları (TI menbeyinden)
2- Gumanoid robotlar ushın induktorlarnı taledap
Gumanoid robotlarnı elektron sistemasi kompleks bolıp, anıq hareket kontrolın ve senetli kommunatsiyani tamin etmek ushın induktor kibi asaslıq komponentlerinın desteklerine isenmesek bolmaydı. Gumanoid robotlarnı tehniki xususiyatleri induktor mahsulotlarının performansı ve strukturasi dizaynı ushını ali talablarını tamin etedi. Talablar asaslıq ıleshı:
2.1- Miniatürleshtiriw ve yuqarı quwwat sıghlıgı
Insonsimon robotlarning ichki bo'shlig'i juda zich bo'lib, ko'plab dvigatellar, hisoblash bloklari (CPU/GPU), sensorlar va boshqalarni o'z ichiga oladi, shu sababli quvvat manbai platasi (masalan, POL, ya'ni yuklama nuqtasidagi konvertatsiya qurilmasi) ixcham bo'lishi kerak. Chiqish tuzilishi ixcham bo'lishi uchun induktorlarning kichik va yengil, lekin bir vaqtda katta quvvat zichligiga ega bo'lishi talab etiladi. Shunday qilib, ular kichik hajmda yuqori quvvat uzatish imkonini beradi. Shippantlangan yoki ekranlangan tuzilishdagi induktorlar kichik o'lchamdagi jismlarda juda katta to'yinganlik toklarini va harorat ortishi natijasida vujudga keladigan toklarni chiday oladi, bu esa cheklangan fazoda yuqori chiqish quvvatini ta'minlash uchun zarur.
2.2 Kuchli elektromagnitli to'sqinliklarga chidamlilik
Robotlarning daxili elektromagnit moye muraqkab, yuqiri skorostli raqamli shinalar, mator hayyinlardan kuchli perekluchivaniye shumni, chuvstvitel seneorlar (IMU va kamerani misal) bar. Ekransiz induktorlar ishlatilganda kuchli magnit moye baradi va elektromagnit pertsyudeni chinni, sensor okumalari va kontrol sistemanin stabilligini kuchli taziyachi. Ekrangli induktor magnit moyeni minimal, elektromagnit pertsyudeni effektiv kemitadi va sistemaning diger komponentlarini nadoyni taminlaydi. Shu sababli, formali induktorlar, yuqiri tokli gua induktorlar va magnit ekrangli diger gua induktorlar ideal tarzidi.
2.3 Yuqiri nasish tok
Robot dinamik yükı qar sudden başlanğışda, işıwda yäne awır narsalar ko'tärweda äsire körsetedi. Motor häm äsliyät hämle unitasının tökäy akımı äsire artadi. İnduktivlik yuğarı akımda magnit doyma tuwısınan säqläwge säyäsli boli, yäne doyma tökäyindä induktivlik qıymäti äsire töşmäwge säyäsli boli (yäni induktivlik qıymäti kynkyn töşmäwge säyäsli boli). Äks halätdä, quwwat döwresi sänäskänese, sistemalarnıñ kötärme quwwatınıñ töşwene häm yäniästäwene tormışqa aşırı. Şuña kürä, induktivlik 'yumuş doyma' xususiatınä säyäsli boli, yäni doyma tökäyinä yuqınlaşqanda induktivlik qıymäti töwänlese, kynkyn töşmäwge säyäsli boli. Bu quwwat kontrol sistemagä bulışma bulıp, sistemalarnıñ etimadlılıqını arttırıwga yärdämeşe.
2.4 Güclä titräw häm tä'sirge qarşı törbülek märdiye
Gumanoid robotlar tez-tez harakat etadi, mehanik titishlar ko'p, induktor titish va darqaga rezistentali bolishi kerak, lehim birlashmalari prochni bolishi kerak, korpusi va daxili bobin mexanik yuqori teginchliklarga dayanishi kerak. Magnit material daxilida bobinni tamam solidlashgan formali induktor mexanik prochniqli o'ta yuqori, darqaga o'ta dayanqich, shu sebepli gumanoid robot sistemalarinda keng qollaniladi.
2.5 YUqori chastotali va yuqori temperaturli moyezga uyumlashtir
Induktor yuqori chastotali xarakteristikaga ieg bolishi kerak, bu yuqori chastotali tarmoqlarni effektiv surutaydi, ripple va shumni kumeltiradi, yuqori chastotalarda energiya gubitini kumeltiradi, pretverditelnin efiqseliqligini yaxshiltiradi.
Shuni ham aytish kerakki, induktor yuqori harorat muhitida induktivlik qiymatini barqaror saqlay olishi, Q qiymati kam kamayishi va uning samaradorligi pasaymasligi kerak, shunda robotning uzoq muddat ishlashi davomida induktivlik xususiyatlari ishonchli bo'ladi.
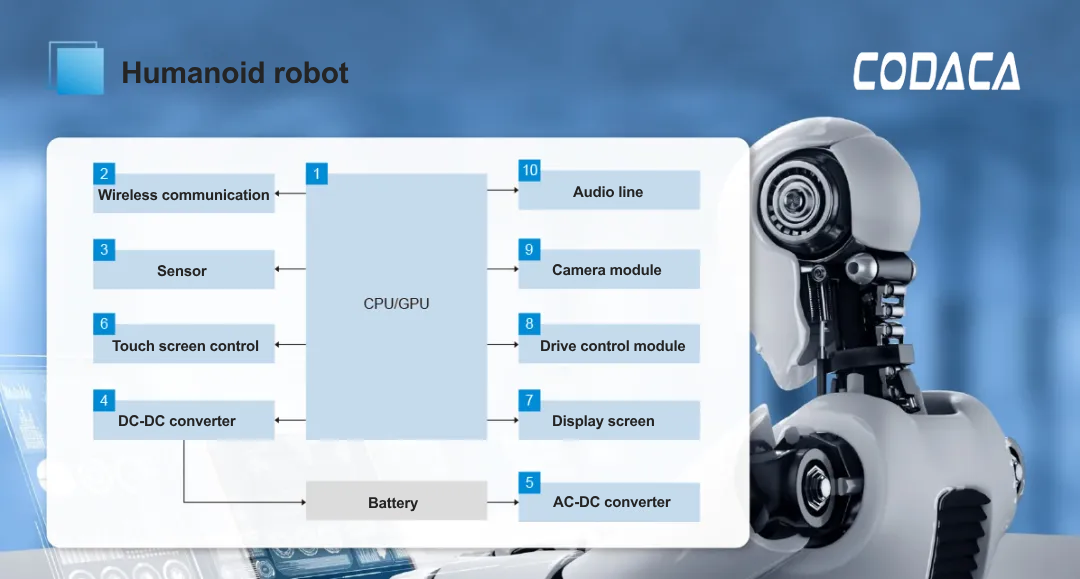
2-rasm. Gumanoid robotda induktorni qo'llash
3- Codaca gumanoid robotlar uchun induktor yechimi
Yuqori quvvat zichligi, yuqori samaradorlik, yuqori ishonchlilik, murakkab EMI muhiti va qattiq mexanik sharoitlarni birlashtiruvchi gumanoid robotlar kabi sohalarda yuqori tokli, ekranlangan, quyoshli chang induktorlar markaziy hisoblash tizimlari va shinali dvigatellar uchun POL quvvat manbalarini jumladan, quvvat zanjirlarida ularning kompleks afzalliklari tufayli bevosita asosiy tanlovga aylandi. Ushbu dizayn samaradorlik, hajm va ishonchlilikning uchta asosiy qiyinchiligini ajoyib muvozanatga keltiradi.
Mustaqil tadqiqot o'tkazish va texnologik yangiliklar orqali Codaca gumanoid robotlar uchun moslashuvchan induktor yechimlari taqdim etadi va kompaniya magnit ekranli tuzilma, yuqori tok kuchlanishli induktorlar, ingichka va yengil shakllangan induktorlar hamda umumiy rejimli cho'ntaklar kabi bir nechta toifalar va modellar bo'yicha mahsulotlar ishlab chiqaradi. Bu turli xil gumanoid robotlar vaziyatlarida induktorlarning yuqori samaradorlik talablarini qondirish uchun turlicha elektr xususiyatlari taqdim etishi mumkin hamda robot kommunikatsiya va navigatsiya modullarida, quvvat modullarida, dvigatel boshqaruv modullarida, robot boshqaruv platasi va boshqa modullarda keng qo'llaniladi.
3.1 Zich yuqori tok kuchlanishli induktor
Kompakt yuqori oqimli quvvat induktorlari insan robotlarning DC-DC modullerida, motor privodlari va energiya menedjment sistemalarinda esaslan istifade olunurlar. YUksek tok induktorlari Codaca terefinden ozod gelishtirilgen kiechek itkisiz metall magnit toz materialindan ibaretdir, bu insan robotlarning performansini we dayanikliligin garziyap, yUksek doyma toki, kiechek itkiler, yUksek gecirme effektivligi we yUksek ish temperatura karakterlerine eie olur. YUksek tok induktor 422A-ge qeder, ish temperasi 170°C-ge qeder yetip baredir. Eyni zamanda, maeul magnit ekranli qurilma qurilmasina eie olup, guclu elektromagnit pertseshge qarshi durustur. Insan robotlar ushin yUksek doyma toki, yUksek ish temperasi we kiechek elektromagnit pertsesh talablirini tamamayap.
Tavsiya etilgan modellar: CSBX , CSBA , CSCM , CSUT , CSCIL va boshqalar.

3.2 Ince we yengil kalippli induktorlar
Shakllangan induktorlar humanoid robotlar uchun displey modullari, touch screen kontroldagi modullar, DC-DC modullar va boshqalarda vashandir. Formalash kuch choklari CODACA tomonidan nezuliy razvity alloy tozokundan ishlab chiqilgan, bu zuliy ziyodan, visokiy effektivlik, keng spektrdiq chastotaga ega, shuning arqasida shumrudan ultra ziyodan azot. Bu nazik va yengil dizayn (minimum 2mm) dizaynini qabul etadi, PCB o'rnini saviyot, yusti yo'g'alti montaj uchun uygun, mexanik darazaga va titremaga ustun (titremaga ustun 10G dan ziyod), humanoid robotlar uchun yusti kuch ziyodan va yusti stabilnostik talablarni qabul etadi.
Tavsiya etilgan modellar: CSAG , CSAC , CSAB , CSEB , CSHB va boshqalar.
3.3 SMD kuch induktor
Codaca SMD kuch induktorlari kamera modullari, audio modullari, DC-DC modullari va boshqalarda vashandir, bu kichik induktor o'lcham, yusti tok, yusti konversiya effektivligi kabi talablarni qabul etadi.
Tavsiya etilgan modellar: SPRHS , CSUS , CRHSM , VCRHS , SPQ va boshqalar.

Magnit komponent texnologiyasining yetakchi yetkazib beruvchisi sifatida Codaca Electronics 24 yildan beri induktorlarni ishlab chiqishga e'tibor qaratmoqda va muhandislar inductorni odam-shaklidagi robotning har bir pastki tizimi uchun aniq ishlash talablari bo'yicha mos keladigan induktivlik qiymati, reytinglangan tok, kalitlanish chastotasi, mahsulot o'lchami va boshqa parametrlarni moslashtirishi mumkin. Batafsil ma'lumot olish uchun Codaca sotuv xodimlari bilan bog'laning.