
Liên Kết Nhanh

Nhu cầu ngày càng tăng về tự động hóa trong ngành sản xuất và dịch vụ đang thúc đẩy sự phát triển nhanh chóng của robot hình người. Với sự gia tăng về số độ tự do (DOF) và cải thiện tốc độ phản ứng với môi trường, robot hình người trở nên ngày càng tinh vi, cho phép mô phỏng chuyển động con người một cách thực tế hơn. Số độ tự do cao hơn có nghĩa rằng robot hình người cần nhiều bộ điều khiển động cơ hơn, và cuộn cảm đóng một vai trọng yếu trong các hệ thống điều khiển động cơ, quản lý nguồn và xử lý tín hiệu của robot hình người.

1- Ứng dụng chính của cuộn cảm trong robot hình người
Cuộn cảm chủ yếu được sử dụng trong robot hình người ở các lĩnh vực điều khiển động cơ, quản lý nguồn và xử lý tín hiệu.
Bộ truyền động động cơ: Các robot hình người cao cấp trên thị trường thường có từ 40-50 động cơ khớp, quyết định độ tự do và tính linh hoạt của robot. Cuộn cảm điều khiển động cơ quay trơn tru thông qua lưu trữ năng lượng và làm mượt dòng điện, giúp hệ thống điều khiển động cơ của robot hình người đạt được chuyển động khớp, điều chỉnh tư thế và cân bằng động. Các bộ truyền động động cơ và tải công suất cao yêu cầu cuộn cảm có đặc tính dòng điện bão hòa cao và khả năng chịu dòng điện lớn để đối phó với các dao động dòng điện tức thời. Đồng thời, cần giảm thiểu tổn thất để nâng cao hiệu suất hệ thống và kéo dài tuổi thọ pin.
Quản lý năng lượng: Cuộn cảm là thành phần cốt lõi của bộ chuyển đổi DC-DC (như các mạch buck và boost) trong các hệ thống quản lý điện năng, cung cấp nguồn điện ổn định ở các điện áp khác nhau cho các bộ xử lý AI, cảm biến, mô-đun truyền thông, v.v., tối ưu hóa việc phân phối và hiệu suất chuyển đổi năng lượng. Yêu cầu bao gồm điện trở một chiều (DCR) thấp, hiệu suất chuyển đổi cao để giảm tổn thất điện năng, dòng điện bão hòa cao và độ ổn định nhiệt tốt.
Xử lý tín hiệu: Trong các hệ thống xử lý tín hiệu, cuộn cảm chủ yếu được dùng để ức chế nhiễu tần số cao và EMI, đảm bảo độ tinh khiết của tín hiệu. Ví dụ, trong hệ thống cảm nhận, nó giúp hiện thực hóa khả năng nhận biết và phản hồi tương tác của robot hình người với môi ngoài. Trong các hệ thống truyền thông và điều khiển, cuộn cảm sử dụng thiết kế EMI để đảm bảo khả năng chống nhiễu của các mô-đun radar, camera, truyền thông không dây, v.v., đồng thời nâng cao độ ổn định hoạt động của thiết bị.
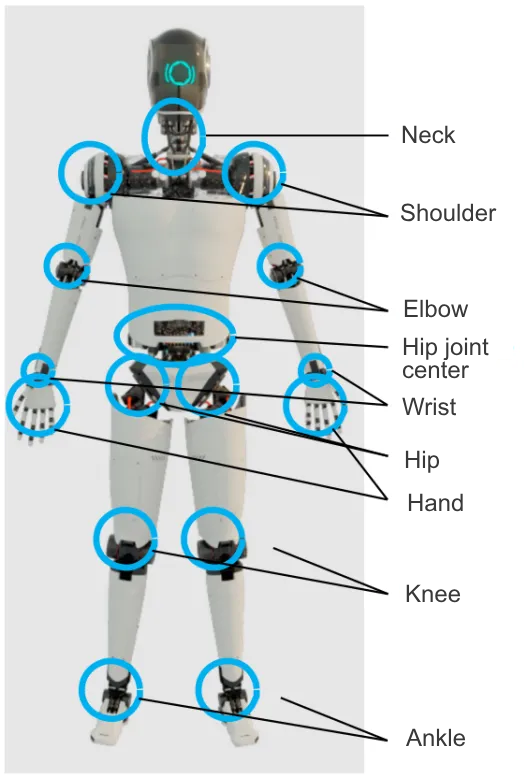
Hình 1: Vị trí chính của động cơ khớp nối trên robot hình người (ảnh từ TI)
2- Nhu cầu về cuộn cảm cho các robot hình người
Hệ thống điện tử của robot hình người rất phức tạp, và để đạt được điều khiển chuyển động chính xác cũng như truyền thông đáng tin cậy, không thể thiếu sự hỗ trợ từ các linh kiện cơ bản như cuộn cảm. Các đặc tính kỹ thuật của robot hình người cũng quyết định yêu cầu cao đối với hiệu suất và thiết kế cấu trúc của sản phẩm cuộn cảm. Các yêu cầu chủ yếu như sau:
2.1 Thu nhỏ kích thước và mật độ công suất cao
Không gian bên trong của robot hình người cực kỳ gọn, tích hợp một lượng lớn động cơ, bộ xử lý (CPU/GPU), cảm biến, v.v., và mạch nguồn (như POL, bộ chuyển đổi point-of-load) phải được thu nhỏ kích thước. Cuộn cảm cần có kích thước nhỏ và nhẹ để phù hợp với thiết kế cấu trúc gọn, đồng thời phải có mật độ công suất cao nhằm đạt được khả năng xử lý công suất lớn trong diện tích nhỏ. Các cuộn cảm có cấu tạo đúc hoặc được bọc chắn bảo vệ có thể chịu được dòng điện bão hòa và dòng điện tăng nhiệt rất lớn trong kích thước vật lý nhỏ, điều này rất cần thiết để đạt được đầu ra công suất cao trong không gian hạn chế.
2.2 Hiệu suất chống nhiễu điện từ mạnh
Môi trường điện từ bên trong robot rất phức tạp, với các mạch số tốc độ cao, nhiễu chuyển mạch mạnh từ các bộ điều khiển động cơ và các cảm biến nhạy cảm (như IMU và camera). Việc sử dụng cuộn cảm không có lớp chắn sẽ tạo ra một từ trường mạnh và trở thành nguồn gây nhiễu điện từ, ảnh hưởng nghiêm trọng đến độ ổn định của các chỉ số đọc cảm biến và hệ thống điều khiển. Cuộn cảm có chắn từ có mức rò rỉ từ trường tối thiểu, giảm hiệu quả nhiễu điện từ và đảm bảo hoạt động tin cậy của các thành phần khác trong hệ thống. Do đó, các cuộn cảm đúc, cuộn cảm công suất dòng cao và các loại cuộn cảm công suất khác có cấu trúc chắn từ là những lựa chọn lý tưởng hơn.
2.3 Dòng điện bão hòa cao
Tải trọng động của robot thay đổi mạnh mẽ, ví dụ như khi khởi động đột ngột, di chuyển hoặc nâng các vật nặng, dòng điện của động cơ và bộ xử lý sẽ tăng vọt tức thì. Cuộn cảm phải có khả năng tránh hiện tượng bão hòa từ tính ở dòng điện cao (tức là giá trị độ tự cảm không giảm mạnh), nếu không vòng lặp nguồn sẽ mất kiểm soát, dẫn đến sụp áp hệ thống và khởi động lại. Do đó, cuộn cảm cần phải có đặc tính "bão hòa mềm", nghĩa là khi tiến gần đến dòng điện bão hòa, giá trị độ tự cảm giảm từ từ chứ không giảm đột ngột như rơi xuống vực. Điều này tạo ra vùng đệm cho hệ thống điều khiển nguồn và nâng cao độ tin cậy của hệ thống.
2.4 Khả năng chống rung động và va đập mạnh
Robot hình người di chuyển thường xuyên, có nhiều rung động cơ học, và cuộn cảm cần phải có khả năng chống rung và sốc, các mối hàn chì phải chắc chắn, và vỏ cùng cuộn dây bên trong có thể chịu được các ứng suất cơ học. Cuộn cảm có cấu trúc đúc ép hoàn toàn cố định cuộn dây bên trong vật liệu từ tính, mang lại độ bền cơ học cực cao và khả năng chịu sốc rất mạnh, do đó được sử dụng rộng rãi trong các hệ thống robot hình người.
2.5 Thích ứng với môi trường tần số cao và nhiệt độ cao
Cuộn cảm cần có đặc tính tần số cao tốt, có thể hiệu quả kìm chế nhiễu tần số cao, giảm độ gợn sóng và tiếng ồn, đồng thời duy trì tổn thất năng lượng thấp ở tần số cao để nâng cao hiệu suất chuyển đổi.
Ngoài ra, cuộn cảm cần có khả năng giữ giá trị độ tự cảm ổn định trong môi trường nhiệt độ cao, giá trị Q giảm ít và hiệu suất không dễ bị suy giảm, nhằm đảm bảo hiệu suất của cuộn cảm trên robot hoạt động tin cậy trong thời gian dài.
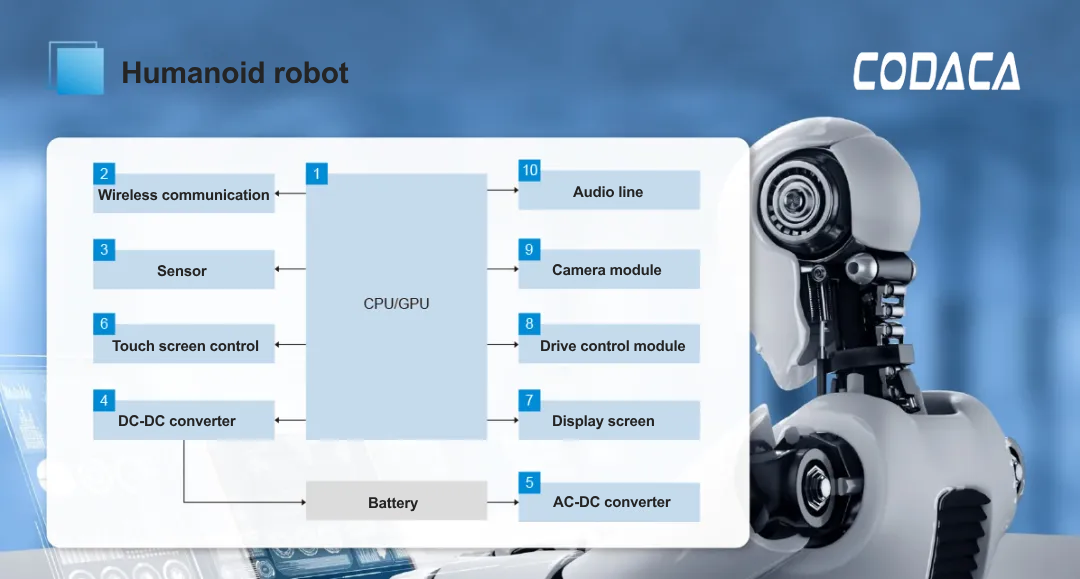
Hình 2 Ứng dụng cuộn cảm trong robot hình người
3- Codaca giải pháp cuộn cảm cho robot hình người
Trong các ứng dụng như robot hình người, nơi kết hợp mật độ công suất cao, hiệu suất cao, độ tin cậy cao, môi trường nhiễu điện từ (EMI) phức tạp và điều kiện cơ học khắc nghiệt, các cuộn cảm lõi bột hợp kim có vỏ bọc chắn từ và chịu dòng cao đã trở thành lựa chọn chủ đạo không thể tranh cãi trong các mạch nguồn, đặc biệt là nguồn POL dành cho các đơn vị tính toán chính và bộ điều khiển động cơ khớp. Thiết kế của nó cân bằng hoàn hảo ba thách thức cốt lõi: hiệu suất, kích thước và độ tin cậy.
Thông qua nghiên cứu độc lập và đổi mới công nghệ, Codaca cung cấp các giải pháp cuộn cảm thích ứng cho robot hình người, và công ty đã ra mắt nhiều loại sản phẩm và mô hình như cuộn cảm nguồn dòng cao cấu trúc chắn từ, cuộn cảm đúc mỏng nhẹ và cuộn cảm chế độ chung. Sản phẩm có thể cung cấp các đặc tính điện khác nhau để đáp ứng yêu cầu hiệu suất cao của cuộn cảm trong các tình huống khác nhau của robot hình người, và được sử dụng rộng rãi trong các mô-đun giao tiếp và dẫn đường của robot, mô-đun nguồn, mô-đun điều khiển động cơ, bảng điều khiển robot và các mô-đun khác.
3.1 Cuộn cảm nguồn dòng cao nhỏ gọn
Máy cảm ứng điện dòng điện cao nhỏ gọn chủ yếu được sử dụng trong các mô-đun DC-DC ở hệ thống điều khiển động cơ và quản lý năng lượng của robot hình người. Cuộn cảm dòng cao sử dụng lõi bột từ tính kim loại có độ tổn hao thấp do Codaca tự phát triển, mang các đặc tính dòng điện bão hòa cao, tổn hao thấp, hiệu suất chuyển đổi cao và nhiệt độ làm việc cao nhằm đảm bảo hiệu năng và độ bền cho robot hình người. Dòng điện đầu vào của cuộn cảm dòng cao có thể đạt tới 422A và nhiệt độ vận hành có thể lên đến 170°C. Đồng thời, sản phẩm áp dụng cấu trúc chắn từ, có khả năng chống nhiễu điện từ mạnh. Sản phẩm hoàn toàn đáp ứng nhu cầu của robot hình người về dòng điện bão hòa cao, nhiệt độ làm việc cao và nhiễu điện từ thấp.
Các mẫu được khuyến nghị: CSBX , CSBA , CSCM , CSUT , CSCIL , v.v.

3.2 Cuộn cảm đúc mỏng nhẹ
Cuộn cảm đúc chủ yếu được sử dụng trong các mô-đun hiển thị robot hình người, các mô-đun điều khiển màn hình cảm ứng, các mô-đun DC-DC, v.v. Các cuộn cảm nguồn ép khuôn sử dụng bột hợp kim ít tổn hao do CODACA tự phát triển, có tổn hao thấp, hiệu suất cao, tần số hoạt động rộng và có thể giảm độ ồn xuống mức cực thấp. Sản phẩm được thiết kế mỏng nhẹ (kích thước nhỏ nhất 2mm), tiết kiệm không gian bảng mạch in (PCB), phù hợp với lắp ráp mật độ cao, đồng thời có khả năng chịu va đập cơ học và rung động mạnh (khả năng chống rung trên 10G), đáp ứng nhu cầu của robot hình người về mật độ công suất cao và độ ổn định cao.
Các mẫu được khuyến nghị: CSAG , CSAC , CSAB , CSEB , CSHB , v.v.
cuộn cảm nguồn SMD 3,3
Cuộn cảm nguồn SMD Codaca chủ yếu được sử dụng trong các mô-đun camera, mô-đun âm thanh, mô-đun DC-DC, v.v., có thể đáp ứng nhu cầu về kích thước cuộn cảm nhỏ, dòng điện lớn, hiệu suất chuyển đổi cao, v.v.
Các mẫu được khuyến nghị: SPRHS , CSUS , CRHSM , VCRHS , SPQ , v.v.

Là nhà cung ứng hàng đầu trong lĩnh vực công nghệ linh kiện từ tính, Codaca Electronics đã tập trung vào phát triển cuộn cảm trong 24 năm, và các kỹ sư có thể lựa chọn giá trị độ tự cảm, dòng định mức, tần số đóng ngắt, kích thước sản phẩm, v.v. phù hợp theo các yêu cầu hiệu suất cụ thể của từng hệ thống con trong robot hình người đối với cuộn cảm. Vui lòng liên hệ nhân viên bán hàng của Codaca để biết thêm thông tin chi tiết.