

ความต้องการในการทำระบบอัตโนมัติที่เพิ่มขึ้นในอุตสาหกรรมการผลิตและบริการกำลังขับเคลื่อนการพัฒนาหุ่นยนต์แบบคล้ายมนุษย์อย่างรวดเร็ว ด้วยจำนวนองศาอิสระ (DOF) ที่เพิ่มขึ้นและการปรับปรุงความเร็วในการตอบสนองต่อสภาพแวดล้อม หุ่นยนต์แบบคล้ายมนุษย์จึงซับซ้อนมากยิ่งขึ้น จนสามารถเลียนแบบการเคลื่อนไหวของมนุษย์ได้อย่างสมจริงมากขึ้น องศาอิสระที่สูงขึ้นหมายความว่าหุ่นยนต์แบบคล้ายมนุษย์ต้องใช้ชุดขับเคลื่อนมอเตอร์มากขึ้น และอินดักเตอร์มีบทบาทสำคัญในระบบควบคุมมอเตอร์ การจัดการพลังงาน และระบบประมวลผลสัญญาณของหุ่นยนต์แบบคล้ายมนุษย์

1- การประยุกต์ใช้อินดักเตอร์หลักในหุ่นยนต์แบบคล้ายมนุษย์
อินดักเตอร์ถูกใช้หลักในหุ่นยนต์แบบคล้ายมนุษย์ในระบบขับเคลื่อนมอเตอร์ การจัดการพลังงาน และการประมวลผลสัญญาณ
ระบบขับเคลื่อนมอเตอร์: หุ่นยนต์มนุษย์รูปร่างระดับไฮเอนด์ในตลาดมักมีมอเตอร์ขับเคลื่อนแบบอิสระจำนวน 40-50 ตัว ซึ่งกำหนดความคล่องตัวและความยืดหยุ่นของหุ่นยนต์ อินดัคเตอร์ขับเคลื่อนมอเตอร์ให้หมุนอย่างราบรื่นผ่านการเก็บพลังงานและการทำให้กระแสไฟฟ้าเรียบ ช่วยให้ระบบควบคุมมอเตอร์ของหุ่นยนต์สามารถทำงานได้ เช่น การเคลื่อนไหวของข้อต่อ การปรับท่าทาง และการทรงตัวแบบไดนามิก นอกจากนี้ มอเตอร์ไดรฟ์และโหลดกำลังสูงยังต้องการอินดัคเตอร์ที่มีคุณสมบัติทนต่อกระแสเซทูเรชันสูง และมีความสามารถในการนำกระแสไฟฟ้าได้มาก เพื่อรับมือกับการเปลี่ยนแปลงของกระแสไฟฟ้าที่เกิดขึ้นชั่วขณะ พร้อมทั้งจำเป็นต้องลดการสูญเสียพลังงานเพื่อเพิ่มประสิทธิภาพของระบบ และยืดอายุการใช้งานของแบตเตอรี่
การจัดการพลังงาน: อินดักเตอร์เป็นองค์ประกอบหลักในเครื่องแปลง DC-DC (เช่น วงจรบัคและบูสต์) ของระบบจัดการพลังงาน ทำหน้าที่จ่ายไฟอย่างมั่นคงที่แรงดันต่างๆ ให้กับโปรเซสเซอร์ AI, เซ็นเซอร์, โมดูลการสื่อสาร เป็นต้น เพื่อเพิ่มประสิทธิภาพการกระจายและการแปลงพลังงาน ต้องการอินดักเตอร์ที่มีความต้านทานกระแสตรงต่ำ (DCR), ประสิทธิภาพการแปลงสูงเพื่อลดการสูญเสียพลังงาน, กระแสอิ่มตัวสูง และมีเสถียรภาพอุณหภูมิดี
การประมวลผลสัญญาณ: ในระบบประมวลผลสัญญาณ อินดักเตอร์ใช้เพื่อควบคุมสัญญาณรบกวนความถี่สูงและ EMI โดยช่วยรักษาความบริสุทธิ์ของสัญญาณ เช่น ในระบบการรับรู้ ช่วยให้หุ่นยนต์แบบคล้ายมนุษย์สามารถตรวจจับและตอบสนองปฏิสัมพันธ์กับสภาพแวดล้อมภายนอกได้ ในระบบการสื่อสารและการควบคุม อินดักเตอร์ใช้การออกแบบ EMI เพื่อให้มั่นใจถึงความสามารถในการต้านทานสัญญาณรบกวนของเรดาร์ กล้อง สื่อสารไร้สาย และโมดูลอื่น ๆ และเพิ่มความมั่นคงในการทำงานของอุปกรณ์
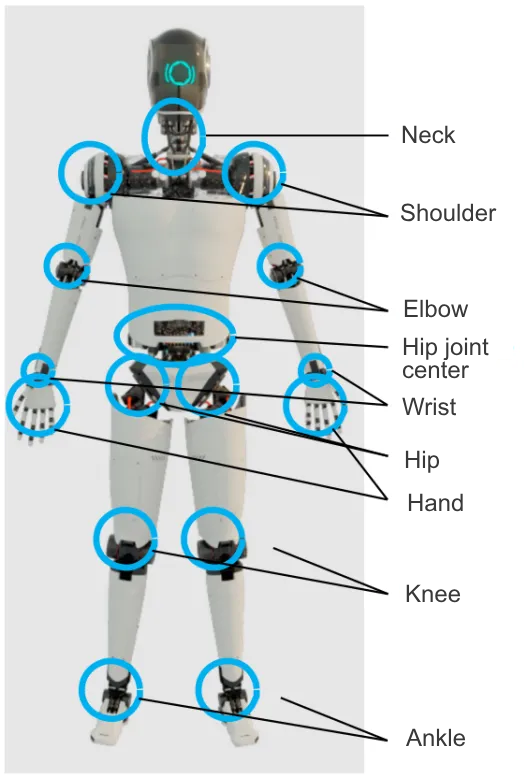
รูปที่ 1: ตำแหน่งหลักของมอเตอร์ต่อข้อต่อในหุ่นยนต์มนุษย์ (ภาพจาก TI)
2- ความต้องการหม้อแปลงเหนี่ยวนำสำหรับหุ่นยนต์มนุษย์
ระบบอิเล็กทรอนิกส์ของหุ่นยนต์มนุษย์มีความซับซ้อน และเพื่อให้สามารถควบคุมการเคลื่อนไหวได้อย่างแม่นยำและสื่อสารได้อย่างเชื่อถือได้นั้น จำเป็นต้องอาศัยองค์ประกอบพื้นฐาน เช่น หม้อแปลงเหนี่ยวนำ ลักษณะทางเทคนิคของหุ่นยนต์มนุษย์ยังกำหนดข้อกำหนดที่เข้มงวดต่อประสิทธิภาพและการออกแบบโครงสร้างของผลิตภัณฑ์หม้อแปลงเหนี่ยวนำ โดยข้อกำหนดหลักมีดังนี้:
2.1 การทำให้มีขนาดเล็กลงและมีความหนาแน่นของกำลังไฟฟ้าสูง
พื้นที่ภายในของหุ่นยนต์แบบมนุษย์มีความจำกัดมาก โดยรวมชิ้นส่วนจำนวนมาก เช่น มอเตอร์ หน่วยประมวลผล (CPU/GPU) เซ็นเซอร์ เป็นต้น และแผงวงจรจ่ายไฟ (เช่น POL, point-of-load converter) จะต้องมีขนาดเล็กลง ตัวเหนี่ยวนำจำเป็นต้องมีขนาดเล็กและเบาเพื่อให้เข้ากับการออกแบบโครงสร้างที่กะทัดรัด ขณะเดียวกันก็ต้องมีความหนาแน่นของกำลังไฟสูง เพื่อให้สามารถจัดการกับกำลังไฟได้มากในพื้นที่ขนาดเล็ก ตัวเหนี่ยวนำที่มีโครงสร้างแบบโมลด์หรือมีเกราะป้องกันสามารถทนต่อกระแสเซตูเรชั่นและกระแสเนื่องจากอุณหภูมิสูงขึ้นได้มากในขนาดกายภาพที่เล็ก ซึ่งเป็นสิ่งจำเป็นสำหรับการสร้างกำลังไฟออกได้สูงในพื้นที่จำกัด
2.2 สมรรถนะการต้านทานการรบกวนทางแม่เหล็กไฟฟ้าอย่างแข็งแกร่ง
สภาพแวดล้อมแม่เหล็กไฟฟ้าภายในหุ่นยนต์มีความซับซ้อน โดยประกอบด้วยวงจรดิจิทัลความเร็วสูง คลื่นรบกวนจากการสลับแรงสูงจากไดรเวอร์มอเตอร์ และเซ็นเซอร์ที่ไวต่อการรบกวน (เช่น IMUs และกล้อง) การใช้อินดักเตอร์แบบไม่มีชีลด์จะสร้างสนามแม่เหล็กที่เข้มข้นและกลายเป็นแหล่งกำเนิดของสัญญาณรบกวนแม่เหล็กไฟฟ้า ซึ่งส่งผลกระทบอย่างรุนแรงต่อความเสถียรของการอ่านค่าจากเซ็นเซอร์และระบบควบคุม อินดักเตอร์แบบมีชีลด์มีการรั่วของสนามแม่เหล็กต่ำมาก ช่วยลดสัญญาณรบกวนแม่เหล็กไฟฟ้าได้อย่างมีประสิทธิภาพ และทำให้มั่นใจได้ว่าองค์ประกอบอื่นๆ ในระบบจะทำงานได้อย่างเชื่อถือได้ ดังนั้น อินดักเตอร์แบบโมลด์ อินดักเตอร์จ่ายกระแสสูง และอินดักเตอร์จ่ายพลังงานประเภทอื่นๆ ที่มีโครงสร้างชีลด์แม่เหล็ก จึงเป็นตัวเลือกที่เหมาะสมกว่า
2.3 กระแสเซ็ตเดียมสูง
โหลดแบบไดนามิกของหุ่นยนต์เปลี่ยนแปลงอย่างมาก เช่น เมื่อเริ่มทำงานทันที การเคลื่อนที่ หรือการยกวัตถุหนัก กระแสไฟฟ้าของมอเตอร์และหน่วยประมวลผลจะพุ่งสูงขึ้นทันที อินดัคเตอร์ต้องสามารถป้องกันการอิ่มตัวของแม่เหล็กที่กระแสสูงได้ (กล่าวคือ ค่าอินดักแตนซ์ไม่ลดลงอย่างรวดเร็ว) มิฉะนั้นวงจรจ่ายพลังงานจะควบคุมไม่ได้ ทำให้แรงดันระบบล่มและต้องรีสตาร์ทใหม่ ดังนั้น อินดักแตนซ์จึงจำเป็นต้องมีคุณสมบัติ "การอิ่มตัวแบบนุ่ม" หมายความว่า เมื่อเข้าใกล้กระแสอิ่มตัว ค่าอินดักแตนซ์จะลดลงอย่างช้า ๆ แทนที่จะลดฮวบเหมือนตกหน้าผา ซึ่งจะช่วยให้ระบบควบคุมพลังงานมีตัวสำรองและเพิ่มความน่าเชื่อถือของระบบ
2.4 ประสิทธิภาพในการต้านทานการสั่นสะเทือนและแรงกระแทกที่แข็งแกร่ง
หุ่นยนต์รูปร่างมนุษย์มีการเคลื่อนไหวบ่อยครั้ง และเกิดการสั่นสะเทือนทางกลอย่างมาก จึงจำเป็นต้องใช้ขดลวดเหนี่ยวนำที่สามารถทนต่อการสั่นสะเทือนและแรงกระแทกได้ รอยบัดกรีของขดลวดควรจะมีความแข็งแรง และตัวเรือนพร้อมทั้งขดลวดภายในต้องสามารถรองรับแรงทางกลได้ ขดลวดเหนี่ยวนำแบบโครงสร้างโมลด์จะทำให้ขดลวดถูกปิดผนึกอย่างสมบูรณ์ภายในวัสดุแม่เหล็ก ซึ่งมีความแข็งแรงทางกลสูงมาก และมีความสามารถในการต้านทานแรงกระแทกได้ดีเยี่ยม จึงถูกนำมาใช้อย่างแพร่หลายในระบบหุ่นยนต์รูปร่างมนุษย์
2.5 ปรับตัวให้เหมาะสมกับสภาวะแวดล้อมที่มีความถี่สูงและอุณหภูมิสูง
อินดักเตอร์จำเป็นต้องมีคุณสมบัติที่ดีในช่วงความถี่สูง สามารถยับยั้งการรบกวนที่ความถี่สูงได้อย่างมีประสิทธิภาพ ลดสัญญาณริ้วและสัญญาณรบกวน รักษาการสูญเสียพลังงานในระดับต่ำที่ความถี่สูง เพื่อเพิ่มประสิทธิภาพการแปลงพลังงาน
นอกจากนี้ ขดลวดเหนี่ยวนำควรสามารถรักษาค่าความเหนี่ยวนำให้มีเสถียรภาพในสภาวะแวดล้อมที่มีอุณหภูมิสูง ค่า Q ลดลงน้อย และประสิทธิภาพไม่เสื่อมสภาพได้ง่าย เพื่อให้มั่นใจว่าสมรรถนะของขดลวดเหนี่ยวนำในหุ่นยนต์มีความน่าเชื่อถือในการทำงานระยะยาว
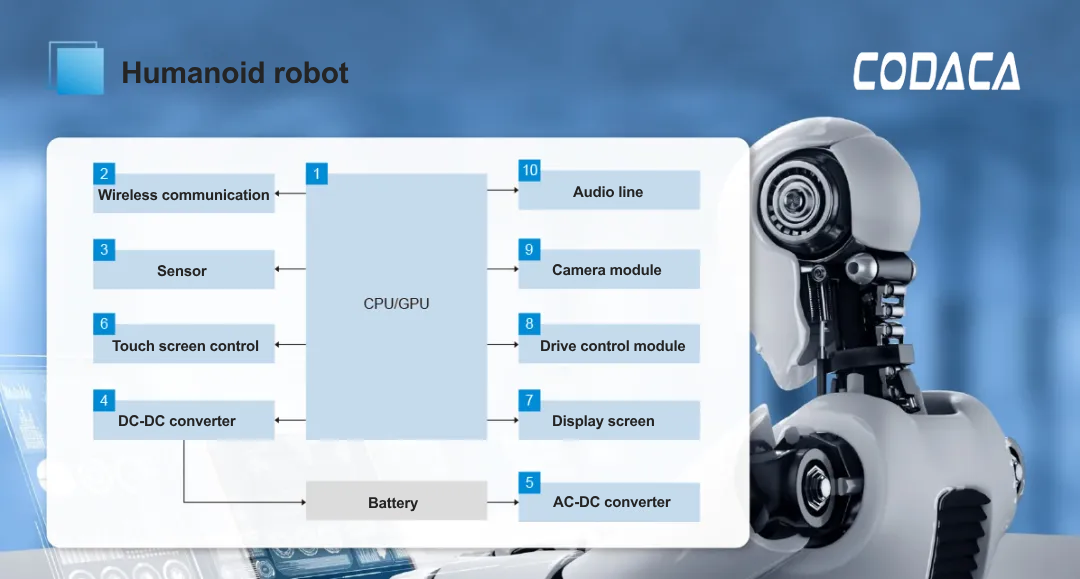
รูปที่ 2 การประยุกต์ใช้ขดลวดเหนี่ยวนำในหุ่นยนต์แบบมนุษย์
3- Codaca โซลูชันขดลวดเหนี่ยวนำสำหรับหุ่นยนต์แบบมนุษย์
ในแอปพลิเคชันต่างๆ เช่น หุ่นยนต์แบบมนุษย์ ซึ่งรวมเอาความหนาแน่นของกำลังไฟฟ้าสูง ประสิทธิภาพสูง ความน่าเชื่อถือสูง สภาพแวดล้อม EMI ที่ซับซ้อน และสภาวะทางกลที่รุนแรง เข้าไว้ด้วยกัน ขดลวดเหนี่ยวนำแบบกระแสสูง มีเกราะป้องกัน และแกนทำจากผงโลหะผสม จึงกลายเป็นตัวเลือกหลักที่ยอมรับโดยทั่วไปในวงจรจ่ายไฟ โดยเฉพาะในแหล่งจ่ายไฟแบบ POL สำหรับหน่วยประมวลผลหลักและขับเคลื่อนมอเตอร์ข้อต่อ ด้วยเหตุผลจากข้อได้เปรียบด้านสมรรถนะโดยรวม ซึ่งการออกแบบของมันสามารถถ่วงดุลความท้าทายหลักทั้งสามด้าน ได้แก่ สมรรถนะ ขนาด และความน่าเชื่อถือ ได้อย่างลงตัว
ผ่านการวิจัยและพัฒนาอย่างอิสระและการนวัตกรรมทางเทคโนโลยี Codaca ให้โซลูชันขดลวดเหนี่ยวนำที่สามารถปรับตัวได้สำหรับหุ่นยนต์แบบมีร่างมนุษย์ โดยบริษัทได้เปิดตัวผลิตภัณฑ์หลายประเภทและรุ่น เช่น ขดลวดเหนี่ยวนำกำลังไฟฟ้ากระแสสูงที่มีโครงสร้างป้องกันแม่เหล็ก ขดลวดเหนี่ยวนำแบบหล่อขึ้นรูปบางเบา และช็อกก์แบบคู่ขนาน (common mode chokes) ซึ่งสามารถให้คุณสมบัติทางไฟฟ้าที่แตกต่างกันเพื่อตอบสนองความต้องการประสิทธิภาพสูงของขดลวดเหนี่ยวนำในสถานการณ์ต่างๆ ของหุ่นยนต์แบบมีร่างมนุษย์ และถูกนำไปใช้อย่างแพร่หลายในโมดูลการสื่อสารและนำทางของหุ่นยนต์ โมดูลพลังงาน โมดูลไดรฟ์มอเตอร์ แผงควบคุมหุ่นยนต์ และโมดูลอื่นๆ
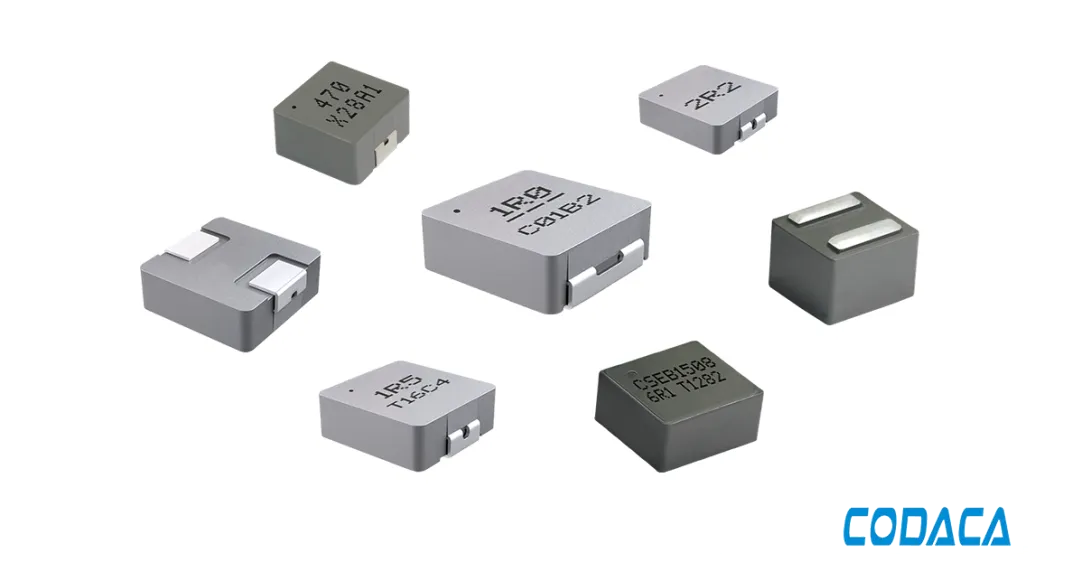
3.1 ขดลวดเหนี่ยวนำกำลังไฟฟ้ากระแสสูงแบบกะทัดรัด
ตัวเหนี่ยวนำพลังงานกระแสสูงขนาดกะทัดรัด ใช้เป็นหลักในโมดูล DC-DC สำหรับระบบขับมอเตอร์และระบบจัดการพลังงานของหุ่นยนต์มนุษย์รูป ตัวเหนี่ยวนำกระแสสูงใช้วัสดุแกนแม่เหล็กผงโลหะที่มีการพัฒนาอย่างอิสระโดย Codaca´ ´´ซึ่งมีคุณสมบัติเด่นด้อยด้วยกระแสอิ่มสูง สูญเสียต่ำ ประสิทธิภาพการแปลงพลังงานสูง และอุณหภูมิการใช้งานสูง เพื่อรับประกันสมรรถนะและความทนทานของหุ่นยนต์มนุษย์รูป ตัวเหนี่ยวนำกระแสสูงสามารถรองรับกระแสสูงถึง 422A และอุณหภูมิการใช้งานสูงถึง 170°C พร้อมด้วยโครงสร้างแม่เหล็กที่มีเกราะกำบัง ทำให้มีสมรรถนะต้านการรบกวนจากสนามแม่เหล็กไฟฟ้าอย่างเข้มแข็ง ซึ่งตอบสนองความต้องการของหุ่นยนต์มนุษย์รูปในด้านกระแสอิ่มสูง อุณหภูมิการใช้งานสูง และการรบกวนแม่เหล็กไฟฟ้าต่ำอย่างเพียงพอ
รุ่นที่แนะนำ: CSBX , ซีเอสบีเอ , CSCM , CSUT , CSCIL , ฯลฯ

3.2 ตัวเหนี่ยวนำแบบขึ้นรูป บางและเบา
อินดักเตอร์แบบหล่อ ใช้เป็นหลักในโมดูลแสดงผลของหุ่นยนต์แบบมีร่างกายมนุษย์ โมดูลควบคุมหน้าจอสัมผัส โมดูล DC-DC เป็นต้น โดยขดลวดเหนี่ยวนำกำลังไฟแบบขึ้นรูปใช้ผงโลหะผสมที่พัฒนาขึ้นเองโดย CODACA ซึ่งมีการสูญเสียพลังงานต่ำ มีประสิทธิภาพสูง ความถี่ในการใช้งานกว้าง และสามารถลดเสียงรบกวนให้อยู่ในระดับต่ำมาก ออกแบบให้มีขนาดบางและเบา (ขนาดเล็กที่สุด 2 มม.) ช่วยประหยัดพื้นที่บนแผงวงจรพิมพ์ (PCB) เหมาะสำหรับการติดตั้งแบบความหนาแน่นสูง และมีความต้านทานต่อแรงกระแทกทางกลและการสั่นสะเทือนได้ดีเยี่ยม (สามารถทนต่อการสั่นสะเทือนได้มากกว่า 10G) จึงตอบสนองความต้องการของหุ่นยนต์แบบมีร่างกายมนุษย์ในด้านความหนาแน่นของกำลังไฟสูงและความมั่นคงสูง
รุ่นที่แนะนำ: CSAG , CSAC , CSAB , CSEB , CSHB , ฯลฯ
อินดักเตอร์กำลังไฟ SMD 3.3
อินดักเตอร์กำลังไฟ SMD Codaca ใช้เป็นหลักในโมดูลกล้อง โมดูลเสียง โมดูล DC-DC เป็นต้น ซึ่งสามารถตอบสนองความต้องการด้านขนาดของขดลวดเหนี่ยวนำที่เล็ก กระแสไฟฟ้าขนาดใหญ่ และประสิทธิภาพการแปลงพลังงานสูง เป็นต้น
รุ่นที่แนะนำ: SPRHS , CSUS , มูลนิธิคริสตศาสนธรรม , VCRHS , SPQ , ฯลฯ

ในฐานะผู้จัดจำหน่ายชั้นนำในด้านเทคโนโลยีส่วนประกอบแม่เหล็ก Codaca Electronics ได้มุ่งเน้นการพัฒนาอินดักเตอร์มาเป็นเวลา 24 ปี โดยวิศวกรสามารถเลือกค่าความเหนี่ยวนำ กระแสไฟฟ้าที่กำหนด ความถี่ในการสลับ ส่วนขนาดผลิตภัณฑ์ ฯลฯ ให้เหมาะสมตามข้อกำหนดด้านประสิทธิภาพเฉพาะของแต่ละระบบย่อยในหุ่นยนต์คล้ายมนุษย์สำหรับอินดักเตอร์ กรุณาติดต่อเจ้าหน้าที่ฝ่ายขายของ Codaca เพื่อรับข้อมูลเพิ่มเติม