
Quick Links

Однією з найпоширеніших форм магнітних компонентів є індуктивність, яка має певне значення індуктивності, а тому її імпеданс збільшується зі зростанням частоти. Цього самого можна вважати фільтром першого порядку для високої частоти; коли об'єкт фільтрації, про який ми говоримо, змінюється з одного струмового шляху (петлі або контурного кола) на два або більше, необхідно розташувати принаймні один індуктивний елемент на кожному шляху, щоб досягти такого ж ефекту фільтрації на високих частотах — це можна легко та елегантно реалізувати у практичних магнітних компонентах, про які йде мова — спільному дроселі. Чому? Тому що коли є кілька шляхів (наприклад, найпоширеніший випадок — два), магнітний потік, створений струмом одного напрямку, може «спільно» використовуватися іншим струмовим шляхом, що робить еквівалентним отримання додаткового імпедансу, також відомого як (магнітний) зв’язок. Таким чином, намотуючи дві взаємозв’язані котушки навколо магнітопроводу, можна досягти кращого ефекту фільтрації, ніж при використанні двох окремих індуктивностей.
Вище було представлено основні функціональні характеристики дроселів спільного режиму, а саме — фільтрацію. Отже, перш за все, слід розрізняти трансформатори та дроселі спільного режиму, які також потребують операції зв’язування, адже фільтрація пригнічує (або поглинає) шум на лінії. З точки зору збудження, це спільний режим, тим часом як трансформатори передають струм збудження напруги, що представляє потужність, і це диференційний режим. Тому, подібно до підключення конденсаторів безпеки, дроселі спільного режиму мають бути у Y-з’єднанні (через заземлювальний контур або контур опорного заземлення), тоді як трансформатори мають бути у X-з’єднанні (перемичка між вхідним і вихідним ланцюгами). По-друге, оцінка й вимірювання ефекту фільтрації спільного режиму вимагають використання додаткових допоміжних схем. Проте на практиці під час тестування ЕМС (електромагнітної сумісності) часто перевіряється лише сигнал приймача (LISN — мережа стабілізації лінійного імпедансу), спричинений поєднанням диференційного та спільного режимів, щоб визначити, чи він відповідає відповідним нормативним стандартам (наприклад, сертифікація CE). Тому роль індуктивності спільного режиму часто важко знайти у технічному описі, що й є причиною того, що інженери часто покладаються на свій досвід для прогнозування моделей. Нарешті, уважні читачі помітять, що дроселі спільного режиму називають індуктивностями, але вони не відрізняються від силових дроселів. Вони не враховують струм насичення чи накопичення енергії, а їхні англійські назви закінчуються словом choke. Отже, їхнє базове значення все ще є choke. Як ми обговоримо далі, саме через їхній choke-ефект вони можуть досягти фільтрації, тому називати їх котушками дроселів спільного режиму більш відповідає їхньому принципу.
У наступному розділі ми дізнаємося про основні структурні принципи, класифікацію застосування та вибір загальномодових дроселів, сподіваючись бути вам корисними як інженерам. Тимчасом, якщо у вас є запитання або ви хочете обговорити відповідне введення, будь ласка, зв'яжіться з нами. Наша інженерна команда надасть вам максимально можливу допомогу з точки зору компонентів і застосувань.
1- Магнітне поле зв'язування
Як показано на Рис. 1, живильна котушка A розподілить магнітне поле в просторі поблизу її електричного кола (у цьому випадку котушки), представлене магнітним потоком Фa (або →Ba) (густину магнітного потоку загальної моди індуктивності). Сила магнітного поля залежить від величини струму, кількості витків котушки, ефективної поперечної площі та наявності магнітного осердя. Магнітний потік у центрі котушки можна приблизно виразити як:

Серед них, якщо в центрі котушки є магнітне осердя, його магнітна проникність  чим більша, тим відповідна еквівалентна довжина магнітного кола
чим більша, тим відповідна еквівалентна довжина магнітного кола  чим коротша, тим більшим неодмінно буде магнітний потік. Це стандартна структура індуктивності та її відповідний розподіл магнітного потоку в просторі. Варто зазначити, що розподіл магнітного потоку не залежить від змін струму і є тотожним співвідношенням. Його сутність походить від магнітного закону Гаусса в рівняннях Максвелла для електромагнітного поля.
чим коротша, тим більшим неодмінно буде магнітний потік. Це стандартна структура індуктивності та її відповідний розподіл магнітного потоку в просторі. Варто зазначити, що розподіл магнітного потоку не залежить від змін струму і є тотожним співвідношенням. Його сутність походить від магнітного закону Гаусса в рівняннях Максвелла для електромагнітного поля.
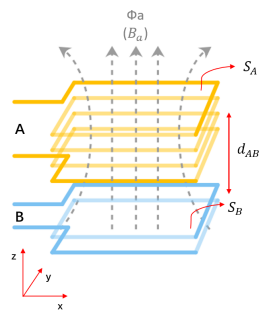
Рис.1 Розподіл магнітного поля в просторі навколо заряджених котушок A і B
Коли інша котушка B у просторі наближається до підключеної котушки A певним чином (як показано на Мал. 1), магнітний потік, частково створений котушкою A, неминуче проходитиме через котушку B, формуючи спільне зв’язування. Згідно з законом Ампера, коли магнітний потік у контурі, оточеному котушкою B, змінюється, у контурі котушки B генерується електрорушійна сила, або наведена напруга. Можна передбачити, що якщо котушка B є відкритою провідною котушкою, струм у контурі не утвориться, а лише виникає наведена напруга на обох кінцях котушки B. Оскільки у контурі відсутній струм, то й відповідне просторове магнітне поле також не утвориться; однак, якщо котушка B є замкнутим контуром, то обов'язково виникатиме струм у контурі, тобто наведений струм. У цей самий час, оскільки є наведений струм, він створить розподіл магнітного поля у зворотному напрямку. Відповідно до просторового розташування котушки B та котушки A, котушка A неодмінно матиме частину розподілу магнітного потоку котушки B. Отже, який буде кінцевий результат такого взаємного наведення? Очевидно, що якщо котушка A має лише постійний струм, котушка B не відчуватиме жодних змін магнітного потоку, який вона спільно використовує у фіксованій позиції. Тому лише тоді, коли у котушці A виникає змінний струм (наприклад, змінний струм), може виникнути взаємне наведення. У ситуації один-до-одного (розглядаючи лише випадок, коли одна котушка працює разом з іншою котушкою), наведений струм завжди має ефект протидії змінам магнітного потоку. Таким чином, вплив відповідної котушки B на котушку A просто компенсуватиме зміни магнітного потоку, які котушка A ділиться з котушкою B. Магнітні потоки, які обидві котушки діляться, взаємно компенсуватимуться у своїх змінах.
Магнітне зв’язування у фіксованому положенні (на відміну від електродвигунів або генераторів) описує взаємодію між різними котушками, обумовлену загальним магнітним потоком за змінного струму. Як трансформатор для перетворення електроенергії або гальванічної розв’язки сигналів або як дросельний індуктивний елемент для компенсації струму, це є прикладом магнітного зв’язування. Під час проектування або виробництва дросельного індуктивного елемента завжди необхідно враховувати одне питання: які параметри мають забезпечити дві котушки, щоб відповідати вимогам? Або, окрім струму та односпрямованої індуктивності, які ще вимоги слід враховувати щодо взаємозв’язку обох сторін? Зазвичай вимаганим параметром є те, що похибка вимірювання на обох сторонах має бути достатньо малою, а іноді коефіцієнт зв’язування має досягати високого рівня (наприклад, 98%). Це пов’язано з тим, що як індуктивний елемент компенсації струму, якщо індуктивність витоку занадто велика, це суттєво вплине на диференційний сигнал, викликаючи зайвий диференційний імпеданс (що призводить до загасання сигналу або зменшення смуги пропускання диференційного режиму) або спричиняючи насичення магнітного осердя й вплив на придушення шумів у загальному режимі. Тому важливо контролювати коефіцієнт зв’язування магнітного поля.
Коли магнітне зв'язування виникає між двома котушками через зв'язувальне середовище (магнітне осердя) з однорідною магнітною проникністю, вказане магнітне потокозчеплення, яке ділиться котушкою А з котушкою В, є  , Навпаки, воно дорівнює
, Навпаки, воно дорівнює  . Тоді, оскільки загальне магнітне потокозчеплення (магнітний зв'язок) відповідає взаємній індуктивності, його можна визначити як класифікацію та вибір спільного режиму індуктивності та класифікацію та вибір спільного режиму індуктивності відповідно
. Тоді, оскільки загальне магнітне потокозчеплення (магнітний зв'язок) відповідає взаємній індуктивності, його можна визначити як класифікацію та вибір спільного режиму індуктивності та класифікацію та вибір спільного режиму індуктивності відповідно  та
та  :
:


Загальне магнітне потокозчеплення на кінці індукційної котушки також відоме як потокозчеплення (linkage,  ), яке може бути представлене залежністю
), яке може бути представлене залежністю  між на основі густини магнітного потоку
між на основі густини магнітного потоку  і магнітним вектором
і магнітним вектором  позиція:
позиція:

Магнітний вектор позиції, розподілений котушкою А в кожній точці котушки В (у середньому випадку класифікації та вибору з відстанню від центру до центру  спільного режиму індуктивності):
спільного режиму індуктивності):
Зчеплення магнітного потоку між котушкою A і котушкою B визначається наступним чином:

Отже, взаємна індуктивність  що діє на котушку A з боку котушки B є наступною:
що діє на котушку A з боку котушки B є наступною:
Той самий принцип може бути застосований для отримання  виразу для:
виразу для:
Як зазначалося раніше, магнітне зв’язування відбувається між двома котушками через зв’язувальне середовище (магнітне осердя) з однорідною магнітною проникністю. Отже  , очевидно:
, очевидно:

Вищевикладене пояснює, що дві котушки, намотані на одному магнітному осерді, мають однакову взаємну індуктивність, позначену як M. Детальний процес доведення можна знайти у формулі Неймана. Припустимо тепер, що загальний магнітний потік  котушки A – це спільна частина
котушки A – це спільна частина  відношення
відношення  , тобто
, тобто  . Аналогічно, коефіцієнт розподілу котушки B є
. Аналогічно, коефіцієнт розподілу котушки B є  , тоді буде:
, тоді буде:

Отже, взаємозв'язок між взаємною індуктивністю двох котушок та їхньою незалежною індуктивністю може бути отримана з вищевказаного рівняння:

Вище зазначено походження коефіцієнта магнітного зв'язку k: реальну диференційну індуктивність можна визначити шляхом окремого вимірювання значень індуктивності двох обмоток котушок (інша котушка залишається у відкритому стані), а також індуктивності витоку (інша котушка залишається у замкнутому стані,  ), і відповідні значення взаємної індуктивності та коефіцієнта зв'язку k. Зокрема, для дуже симетричного дроселя з загальним режимом, намотаного на кільцевому магнітному осерді з високою проникністю (наприклад, феритове кільце MnZn), значення індуктивності обох обмоток будуть дуже близькими, а величина індуктивності витоку наближатиметься до
), і відповідні значення взаємної індуктивності та коефіцієнта зв'язку k. Зокрема, для дуже симетричного дроселя з загальним режимом, намотаного на кільцевому магнітному осерді з високою проникністю (наприклад, феритове кільце MnZn), значення індуктивності обох обмоток будуть дуже близькими, а величина індуктивності витоку наближатиметься до  . Можна побачити, що чим вищий коефіцієнт зв'язку, тим нижче індуктивність витоку.
. Можна побачити, що чим вищий коефіцієнт зв'язку, тим нижче індуктивність витоку.
2- Застосування дроселів з загальною модою
Як вже згадувалося на початку цієї статті, дросель зворотного ходу – це просто котушка індуктивності, яка одночасно підключається до двох струмових кіл. Її функція полягає у пригніченні або послабленні шуму зворотного ходу, що може існувати в обох струмових колах. Проте ці два паралельних струмових кола не обмежуються лише випадком формування диференціального кола, наприклад, ліній L і N в парі силових ліній або ліній D+ і D- на порту даних. Унаслідок виникнення шуму зворотного ходу може виникнути потреба у його пригніченні між лініями передачі, що мають спільне заземлення.
Щоб визначити застосування індуктивності з загальним режимом, спочатку необхідно зрозуміти, як виникає завада у загальному режимі: як показано на рис.2 (довідковий дизайн для джерела живлення Infineon потужністю 60 Вт: DEMO_5QSAG_60W1), вхідний термінал є мережевим входом 85~300VAC, а дроти L, N на порті живлення утворюють загальну точку землі з опорною землею. Насправді, до цієї опорної землі також підключено зелений заземлювальний провід, який з'єднаний з фізичною землею. Зараз лінії L та N утворюють силове коло і підключені через первинну обмотку цього перетворювача Flyback. У якості основного ключового транзистора Q11 використовується 800В супер-перехідний MOSFET-транзистор IPA80R600P7 з максимально допустимим значенням Rds (on) 600 мОм. Для обмеження тепловиділення теплообмінне середовище (алюмінієві радіатори) зазвичай кріплять до його корпусу, що збільшує паразитну ємність його високовольтних виводів до землі, створює ємнісне зв’язування та передає високочастотну напругу вхідного терміналу, формуючи потенціал із шумовими характеристиками. Вхідні лінії L та N також отримують цей потенціал через опорну землю, таким чином утворюючи джерело шуму у загальному режимі. Варто зазначити, що ємнісне зв’язування, як основне джерело шумів у загальному режимі, з яким має справу випробування на електромагнітну сумісність (EMC), широко поширене в різноманітних джерелах живлення з AC-DC як основною формою та різними топологічними структурами. У той же час на первинному та вторинному боках трансформатора дійсно існує багато невеликих струмових кіл, і кожне з них збільшує струм шумів індуктивного зв’язку, що також призводить до важко прогнозованого шуму у загальному або диференційному режимі. Тому це створює багато невизначеностей для корекції EMC, що також є причиною того, чому моделювання електромагнітної сумісності за допомогою програмного забезпечення все ще неможливе.
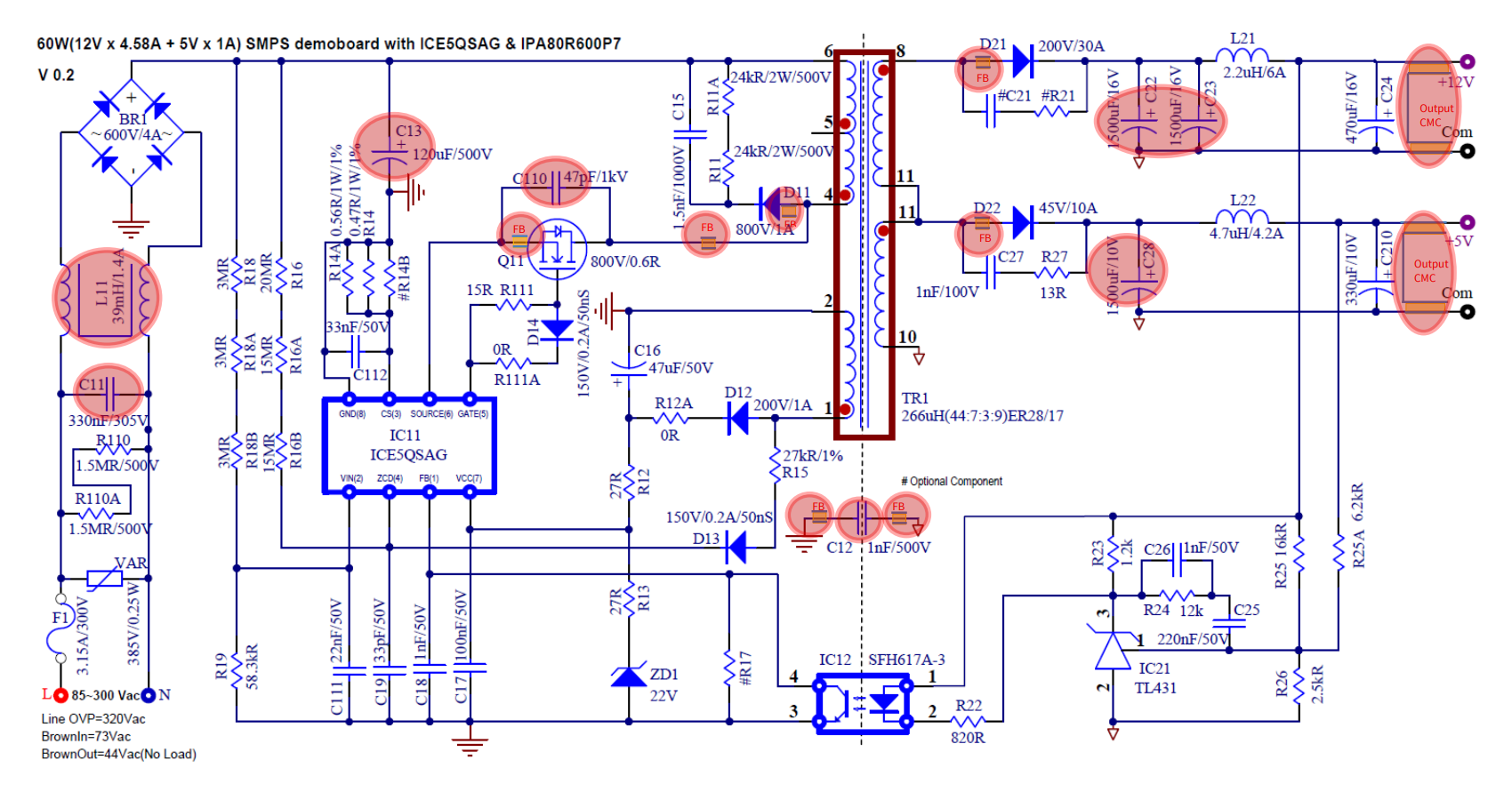

Рис.2 Приклад компонентів стратегії EMI (Infineon DEMO_5QSAG_60W1)
Щоб оцінити величину диференційного шуму, зазвичай необхідно враховувати паразитну ємність у ланцюзі диференційного шуму, яка зазвичай становить десятки пФ. У прикладі, показаному на рис.2, припускаючи паразитну ємність 20пФ, коли вхідна напруга живлення дорівнює 230Vac, а частота перемикання основного силового транзистора становить 200 кГц, загальна тривалість імпульсу включення та виключення становить 1 мкс, а фронти наростання та спаду — по 0,2 мкс. Максимальна напруга на вхідному затискачі це  , коефіцієнт заповнення змінного струму на виході через перемикач становить
, коефіцієнт заповнення змінного струму на виході через перемикач становить  . Перша кутова частота у спектральній щільнісній діаграмі:
. Перша кутова частота у спектральній щільнісній діаграмі:
Відповідна напруга на першому піку (перша гармоніка) у спектральній щільнісній діаграмі:

У колі з перешкодою спільного режиму, без підключення дроселя змагання, максимальний струм спільного режиму можна оцінити, ігноруючи серійний еквівалентний імпеданс (такий як опір проводу, паразитна індуктивність тощо), як показано на рис.3. Після підключення до ЛІМ (мережі стабілізації лінійного імпедансу) величина струму спільного режиму становить:
Отже, амплітуда напруги перешкоди спільного режиму, що приймається випробувальним приймачем (аналізатором спектру) на порту ЛІМ, буде:

Хоча фактичний результат, виявлений на випробувальному приймачі, це:

Це означає, що амплітуди перешкод спільного та диференціального режимів накладаються одна на одну, але очевидно, що якщо придушити перешкоди спільного режиму, кінцеві результати випробувань поліпшаться. Тому, наприклад, у стандарті ЕМС EN55022 для традиційних засобів комунікації та промислових застосувань, амплітуда КП має бути нижчою за  у діапазоні 150 кГц до 500 кГц. Отже, максимальна
у діапазоні 150 кГц до 500 кГц. Отже, максимальна  ослаблення шуму у спільному режимі має бути виконане тут. Взявши за приклад цільове ослаблення -20 дБ, через простий розрахунок основний імпеданс у колі спільного режиму — це імпеданс паразитної ємності, який становить приблизно 25 кОм. Як показано на рис.4, відповідний необхідний імпеданс спільного режиму становить приблизно 250 кОм, що може бути перетворено в дросель спільного режиму 125 мГн.
ослаблення шуму у спільному режимі має бути виконане тут. Взявши за приклад цільове ослаблення -20 дБ, через простий розрахунок основний імпеданс у колі спільного режиму — це імпеданс паразитної ємності, який становить приблизно 25 кОм. Як показано на рис.4, відповідний необхідний імпеданс спільного режиму становить приблизно 250 кОм, що може бути перетворено в дросель спільного режиму 125 мГн.
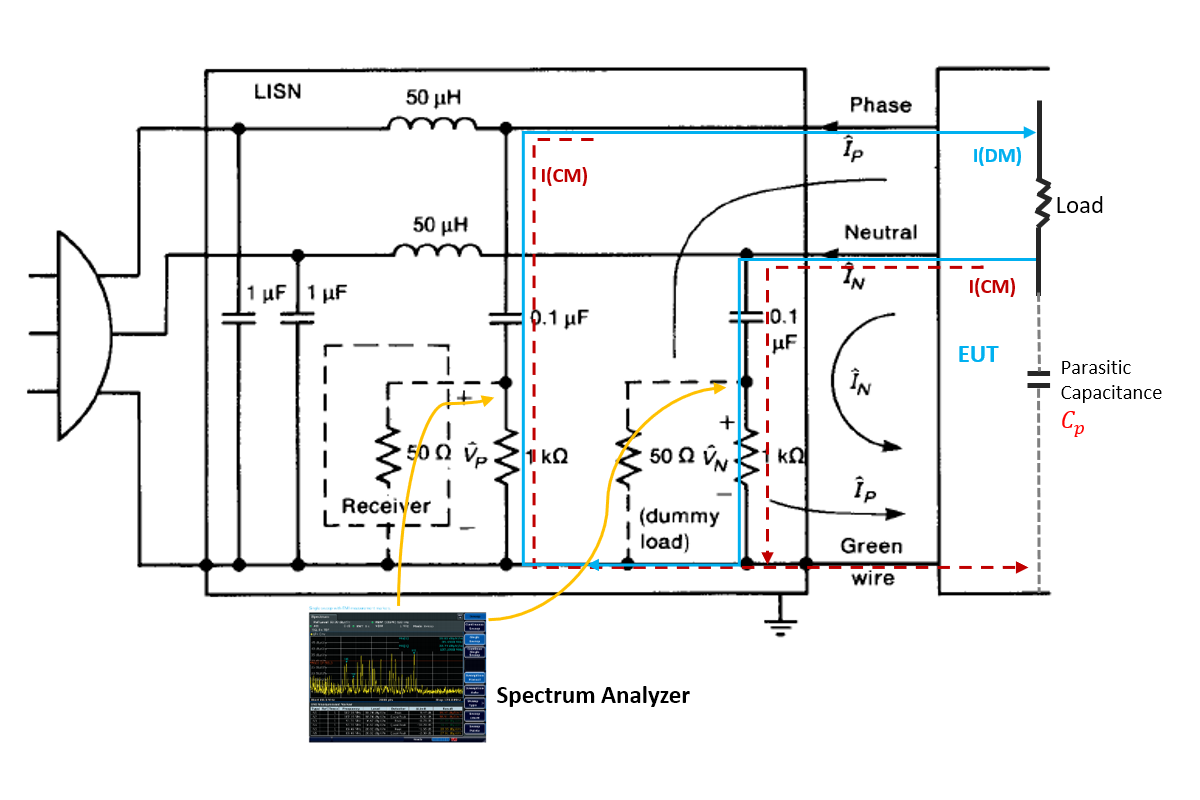
Рис.3 Схематична діаграма тесту на провідну емісію під час випробувань ЕМС (схема кола шуму у спільному режимі та диференційного сигналу)
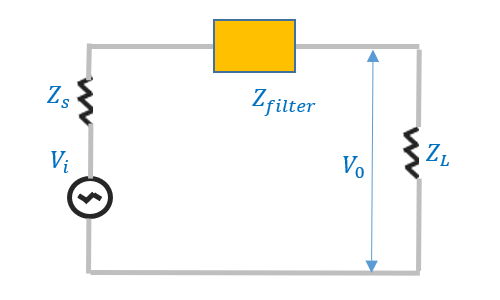
Рис.4 Зв’язок між схемою вставки фільтра (ліворуч) та відповідною амплітудою ослаблення та імпедансом фільтра (праворуч)
Крім застосування звичайної індуктивності в лініях живлення, звичайна індуктивність також часто використовується в лініях високошвидкісних сигналів, таких як USB 3.0, HDMI, LAN тощо, або деяких лініях диференційних сигналів, таких як CAN BUS, SPI або RS232, RS485 тощо. Використання звичайних індуктивностей у лініях сигналів також має функцію пригнічення звичайного шуму, наприклад, співвідношення придушення звичайного режиму, необхідне для відповідності певним комунікаційним специфікаціям. Однак важливішим моментом є ефект струмового компенсування, про який згадувалося на початку, тобто звичайна індуктивність компенсаційного типу.
Як показано на рис. 5, високочастотні сигнальні лінії, як правило, використовують диференційну передачу для передавання сигналів. На сигнальних лініях є резистори, паразитні конденсатори та розподілені індуктивності. Скрутні кабелі можуть ефективно зменшити паразитні конденсатори, але не можуть усунути розподілені індуктивності. Тому на вході приймача існує диференційна вхідна індуктивність, а струм зв’язування на лінії створить шум на графіку сигналу. Ці шуми майже однаково розподілені на обох кінцях приймача відповідно до симетрії передавальної лінії. Оскільки тепер середньофазний дросель встановлено на вхідному вході приймача, майже однакова кількість шумів буде компенсована через зв’язування обмоток середньофазного дроселя, значно зменшуючи зв’язаний шум. Тобто, ефект компенсації струму зменшує вхідний шум на приймачі.
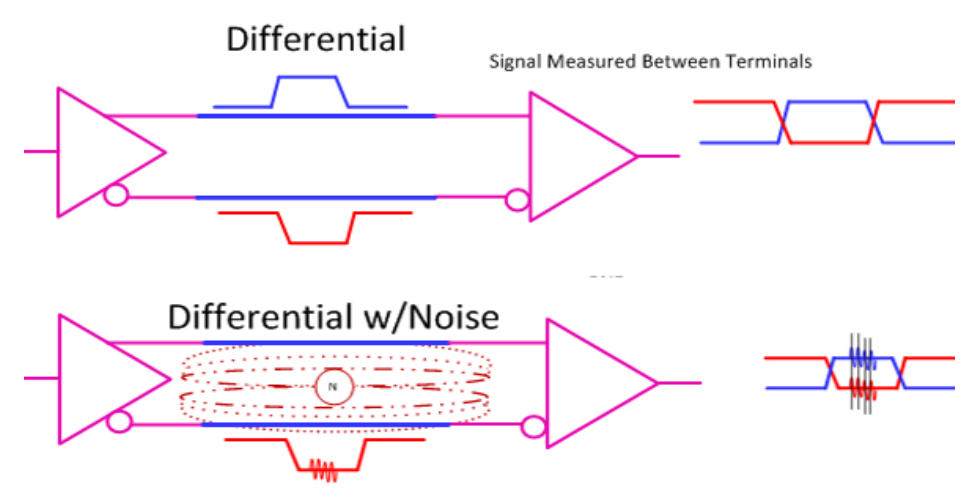
Рис. 6 Процес передачі диференційних сигналів уздовж лінії передачі від передавача до приймача (ліворуч) та поліпшення, отримане завдяки використанню синфазних котушок індуктивності на боці приймача (праворуч)
На діаграмі сигналу, як показано на рис. 6, шляхом зменшення втрат внаслідок паразитної індуктивності лінії, співвідношення сигнал/шум покращиться, що є важливим для довгих ліній передачі або високошвидкісних сигналів. Загалом, лінії передачі, що використовуються для вказаних вище сигнальних портів, зазвичай мають імпеданс 90~120 Ом. Виходячи з конкретних вимог до ширини смуги сигналу, зазвичай обирають синфазні дроселі з коефіцієнтом імпедансу від 1 до 10 разів, щоб забезпечити придушення синфазного шуму в діапазоні від -6 дБ до -20 дБ. Це подібно до застосування джерела живлення, згаданого раніше, і залежить від величини імпедансу синфазного шумового кола. Звісно, зі зростанням частоти (відповідно до вимог високошвидкісної передачі сигналів) синфазний імпеданс системи зменшуватиметься, а надлишковий індуктивність звузить смугу фільтрації. Тому необхідно перевірити, чи обрана індуктивність відповідає вимогам передачі високошвидкісних сигналів.
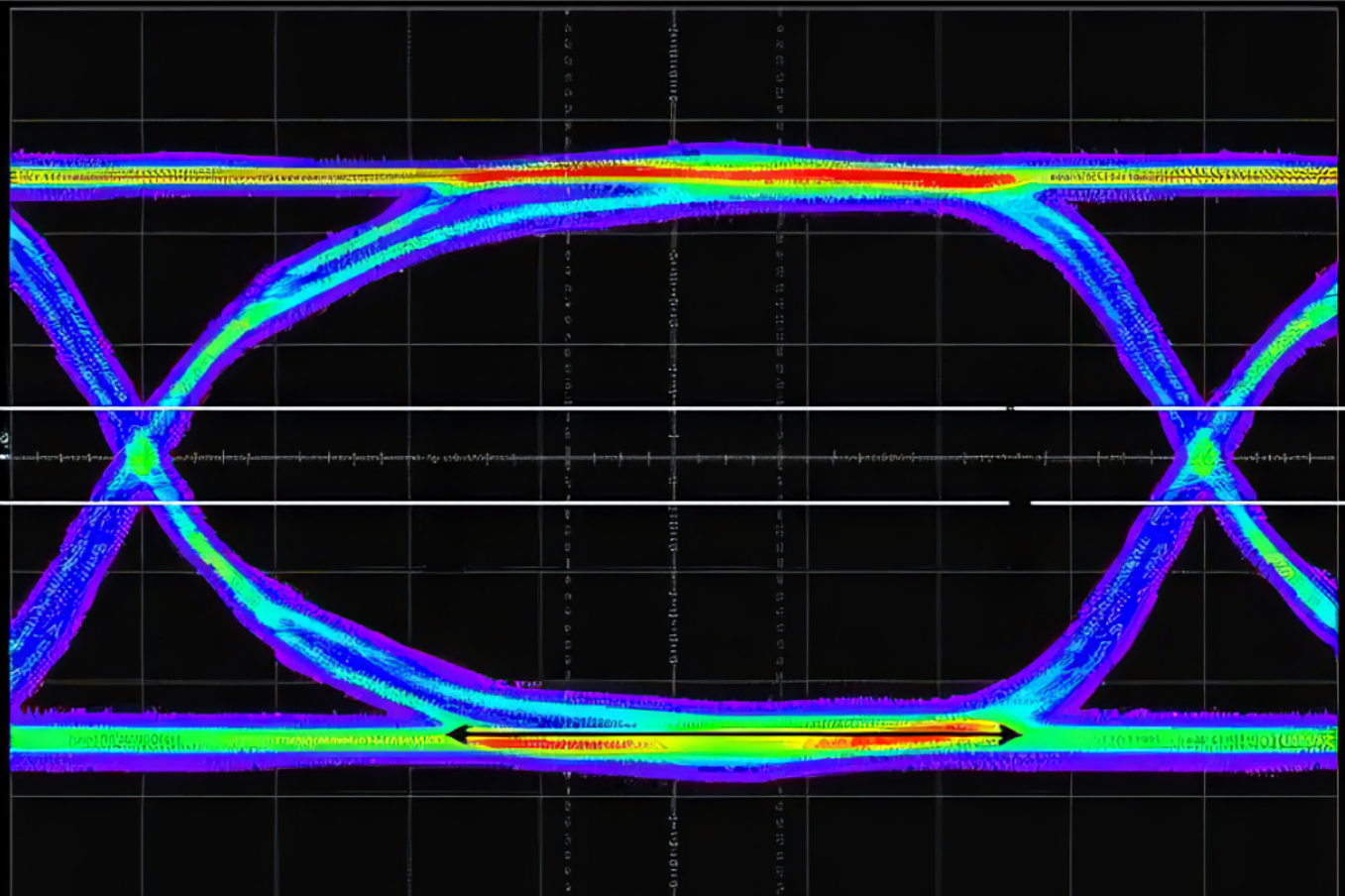
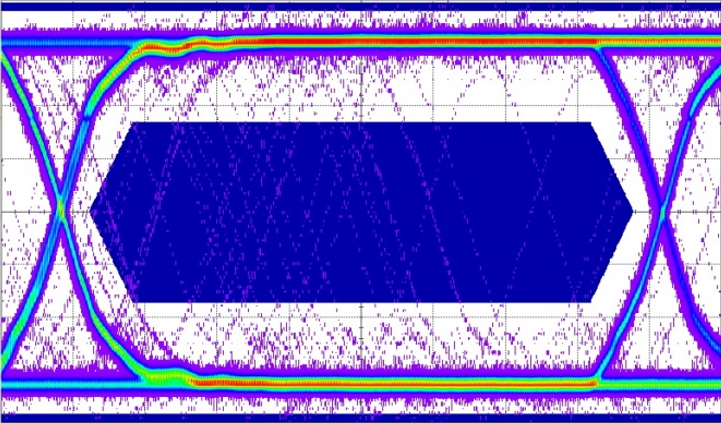
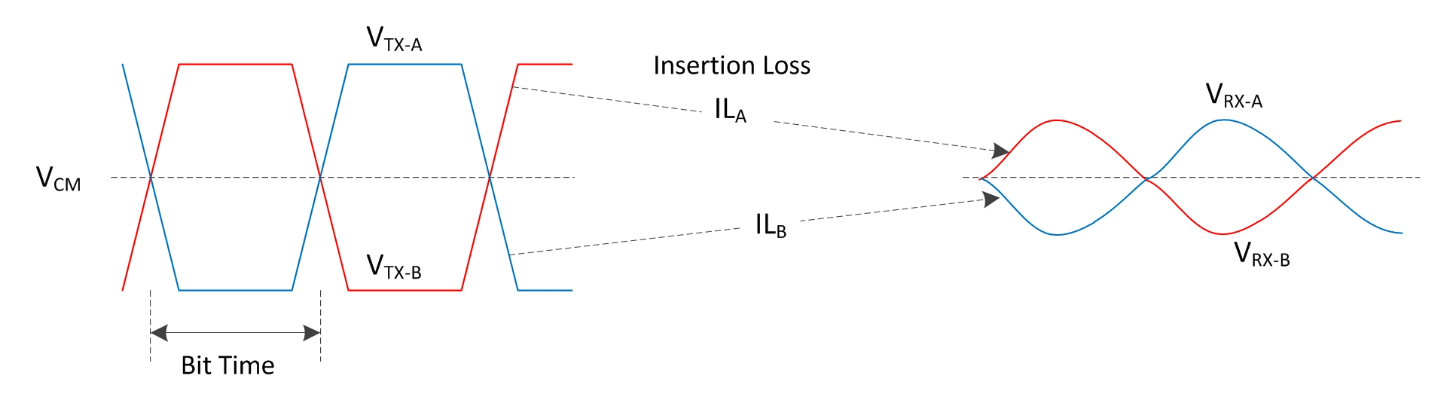
Рис. 6 Схематична діаграма якості сигналу, зміненого внаслідок втрат при вставці лінії на диференційних передавальних лініях
3- Шкода від шуму загальної моди
Отже, у чому полягає проблема з синфазним шумом? Чому при тестуванні електромагнітної сумісності часто необхідно зосередитися на пригніченні синфазного шуму в схемах? Звичайно, щоб відповідати стандартам сертифікації електромагнітної сумісності різних країн, необхідно обмежити амплітуду синфазних і диференційних сигналів, забезпечити безпеку продукції та зменшити потенційну шкоду, яку може завдати електромережі або сусіднім пристроям споживче електричне обладнання. По-друге, з точки зору цілісності живлення та сигналів, більшість електричного обладнання та контролерів побутових приладів працює на низькій напрузі, а зайве шумове напруження може викликати аномальні сигнали керування або передані дані, навіть помилки та простої. Ці аномальні перешкоди можуть мати як друковану плату, так і її радіочастотні завади, наприклад, відрив мобільного пристрою або свистяче шумове мовлення. Нарешті, надмірний синфазний шум, ймовірно, буде випромінюватися в простір у формі високочастотного випромінювання, наприклад, у більших синфазних колах або на провідниках, подібних до антен, створюючи тривалу шкоду для здоров'я, непомітну для людини.
Для спрощення проблеми ми еквівалентно замінюємо лінію передачі на магнітний диполь Герца і отримуємо модель випромінювання синфазних перешкод, як показано на рис. 7. Відстань між точкою вимірювання та центральною позицією лінії передачі синфазного сигналу дорівнює d, яка зазвичай набагато більша за розмір схеми, тому це точка вимірювання у дальній зоні. Отже, для випромінювання антени у дальній зоні її напруженість поля становить:
Серед них,  це фазова константа, що відповідає довжині хвилі випромінювання,
це фазова константа, що відповідає довжині хвилі випромінювання,  це відстань між позиціями вимірювання,
це відстань між позиціями вимірювання,  це кутове відхилення θ градусів від діаграми направленості антени, а для магнітних диполів Герца
це кутове відхилення θ градусів від діаграми направленості антени, а для магнітних диполів Герца ![]() , а також
, а також  , залежать від типу антени. Оскільки випромінювання, прийняте у дальній точці, є результатом одночасної дії двох ліній синфазного сигналу під кутом
, залежать від типу антени. Оскільки випромінювання, прийняте у дальній точці, є результатом одночасної дії двох ліній синфазного сигналу під кутом  , тому:
, тому:

Для синфазних перешкод, як показано на рис. 7:  та
та  , максимальне випромінювання у точці вимірювання отримують таким чином:
, максимальне випромінювання у точці вимірювання отримують таким чином:

Коли відстань між лініями s достатньо мала  Тому це можна спростити як:
Тому це можна спростити як:
Тому інтенсивність випромінювання синфазного сигналу прямо пропорційна довжині лінії передачі синфазного сигналу та зменшується з відстанню. Наведемо приклад величини цієї амплітуди: за умови, що довжина лінії передачі синфазного сигналу становить 1 метр, а амплітуда синфазного струму дорівнює 7,96 мкА, що відповідає випробуванню на відстані 3 метри як FCC Class B на частоті 30 МГц, інтенсивність випромінювання складає:

Ця інтенсивність точно відповідає стандартному обмеженню. Якщо на точці випробувань на відстані 3 метри перебуває провідник або людина завдовжки 1 метр, то вона відчує напругу 100 мкВ. Тривала експозиція в такому середовищі серйозно впливає на здоров'я людини, а накопичена дія випромінювання може спричинити різноманітні хронічні захворювання або окремі ураження, що також є важливим значенням сертифікації ЕМС.
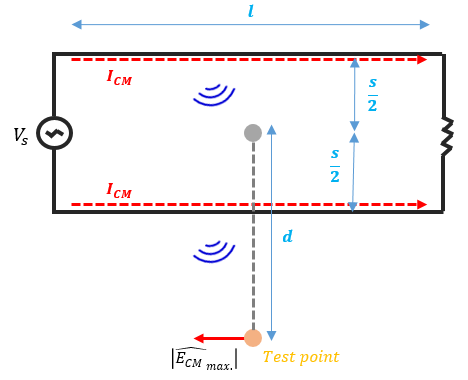
Рис.7 Модель випромінювання та діаграма точок випробувань синфазного шуму
Структура хвильового формату на більшості комутаційних схем може бути класифікована як трапецієподібна хвиля, а її частотний спектр демонструє два етапи уповільнення від  до
до  зі зростанням рівнів гармонік. Вузли — це перша кутова частота та часова кутова частота фронту. Спектр випромінювання інтенсивності загального режиму, зазначеного вище, чітко збільшується з частотою на
зі зростанням рівнів гармонік. Вузли — це перша кутова частота та часова кутова частота фронту. Спектр випромінювання інтенсивності загального режиму, зазначеного вище, чітко збільшується з частотою на  . Тому для поширених імпульсних джерел живлення та схем сигналів трикутної форми спектр випромінювання загального режиму приблизно демонструватиме розподільні характеристики, які спочатку зростають, а потім падають, як показано на рис. 8. Отже, середній діапазон — це частина, яку потрібно особливо контролювати або пригнічувати.
. Тому для поширених імпульсних джерел живлення та схем сигналів трикутної форми спектр випромінювання загального режиму приблизно демонструватиме розподільні характеристики, які спочатку зростають, а потім падають, як показано на рис. 8. Отже, середній діапазон — це частина, яку потрібно особливо контролювати або пригнічувати.
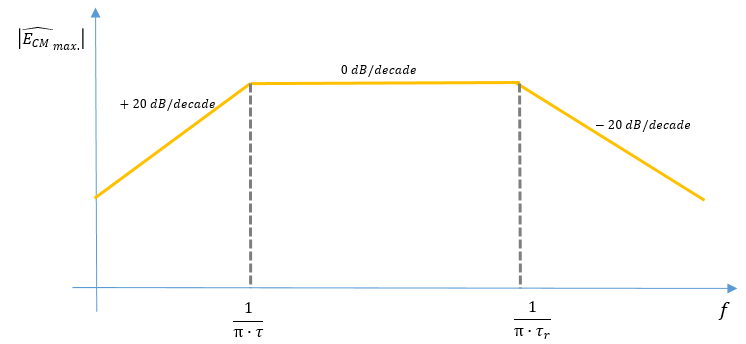
Рис. 8 Розподіл інтенсивності шумового випромінювання загального режиму, що відповідає поширеним трапецієподібним хвилям
4- Вибір дроселів з загальною модою
Для силових ліній джерело синфазного шуму є порівняно зрозумілим, але сторонні фактори важко виміряти за допомогою приладів. У більшості випадків результати поступово уточнюються шляхом аналізу після тестування, тому нагромаджений досвід має велике значення. У розділі 2 цієї статті, де йшлося про застосування синфазних дроселів, вже згадувалося, що теоретична оцінка амплітуди синфазного шуму та відповідні вимоги до індуктивності синфазних дроселів може слугувати початковою точкою для експериментів.
Зазвичай, для загального режиму індуктора, що використовується на етапі фільтрації вхідної живильної напруги змінного струму, застосовується магнітне кільце із замкнутим магнітним колом як магнітопровід. Перевагою цього є те, що можна легко досягти дуже низької індуктивності витоку та дуже високого коефіцієнта зв’язку. Для високої вхідної напруги та порівняно низької частоти перемикання це може забезпечити добрий високий імпеданс при загальному режимі для придушення високої амплітуди шуму у загальному режимі. Через те, що магнітна проникність магнітних матеріалів може бути розділена на індуктивну частину ![]() і частину втрат
і частину втрат ![]() Коли магнітопровід наближається або перевищує найвищу точку характеристики імпедансу, частина втрат буде складати основну частину імпедансу. У цьому випадку пригнічення шуму вже не досягається за рахунок зменшення амплітуди шуму через індуктивний імпеданс, а за рахунок поглинання енергії шуму через втрати на нагрівання. Тому, певний ступінь насичення (надмірне насичення призведе до зниження імпедансу) не вплине на ефект пригнічення шуму, тож немає потреби шукати параметри струму насичення, подібні до тих, що використовуються в потужнісних дроселях.
Коли магнітопровід наближається або перевищує найвищу точку характеристики імпедансу, частина втрат буде складати основну частину імпедансу. У цьому випадку пригнічення шуму вже не досягається за рахунок зменшення амплітуди шуму через індуктивний імпеданс, а за рахунок поглинання енергії шуму через втрати на нагрівання. Тому, певний ступінь насичення (надмірне насичення призведе до зниження імпедансу) не вплине на ефект пригнічення шуму, тож немає потреби шукати параметри струму насичення, подібні до тих, що використовуються в потужнісних дроселях.
При виборі індуктивності спільного режиму. Тим часом, якщо частина індуктивності витоку, наприклад, 1 мГн коефіцієнт зв’язку 99%, на диференціальному колі буде присутня 10 мкГн індуктивність витоку. При розгляді придушення диференціального шуму (як правило, мостовий LC-фільтр) цю частину індуктивності витоку також потрібно враховувати. Помірна індуктивність витоку корисна для придушення високочастотного диференціального шуму, але оскільки індуктивність спільного режиму переважно використовує магнітопроводи закритого типу, це може призвести до насичення сердечника при великих струмах, що впливає на ефективність перетворення енергії та смугу шуму фільтрації. Збільшення частки індуктивності витоку зазвичай можна досягти за допомогою квадратних або рамкових магнітних конструкцій (магнітопроводи типу UU або PQ тощо), або шляхом використання несиметричних обмоток ( ![]() ). Конкретний вибір має бути визначений користувачем шляхом тестування ідентифікації диференціального спільного режиму, щоб визначити, чи є це необхідним.
). Конкретний вибір має бути визначений користувачем шляхом тестування ідентифікації диференціального спільного режиму, щоб визначити, чи є це необхідним.
Щодо параметрів індуктивності зворотного ходу, вони переважно включають значення індуктивності з одного боку, Rdc, номінальний струм, номінальна напруга та витривалість до напруги Hi pot. Значення індуктивності з одного боку в основному визначає розмір імпедансу зворотного ходу. Rdc — це втрати постійного струму в дроті, а нагрівання, спричинене цими втратами, створює обмеження номінального струму. Нарешті, оскільки вона використовується на лініях високої напруги, обмеження напруги та вимоги безпеки позначені окремо. Однак користувачі надають перевагу оцінюванню ефекту фільтрації, тому, як правило, у технічному описі наводяться дві форми кривих характеристик імпедансу. Перша — це форма імпедансу зворотного/диференціального ходу, показана на мал. 9-а, а інша — це форма втрат при включенні в децибелах (dB), показана на мал. 9-b. Обидва еквівалентні, і крива у формі втрат при включенні в децибелах формується шляхом перетворення імпедансу зворотного/диференціального ходу в систему з 50 Ω+50 Ω.
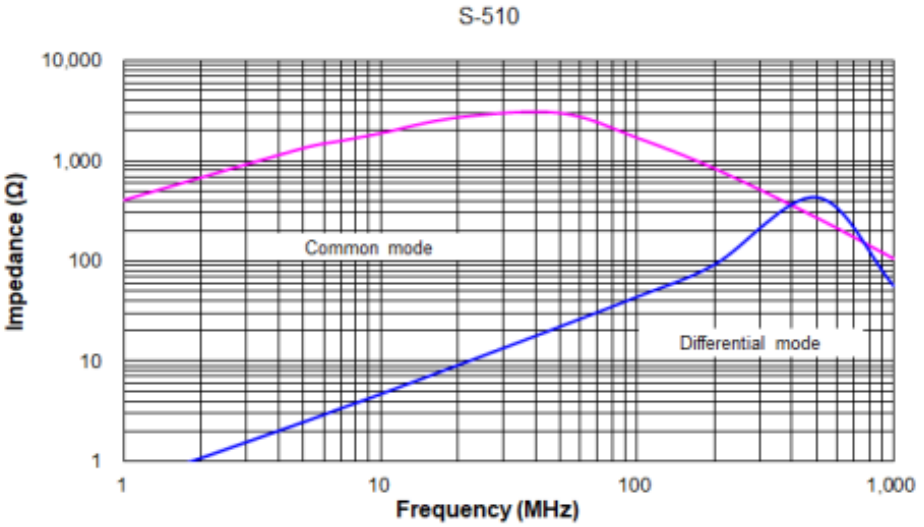
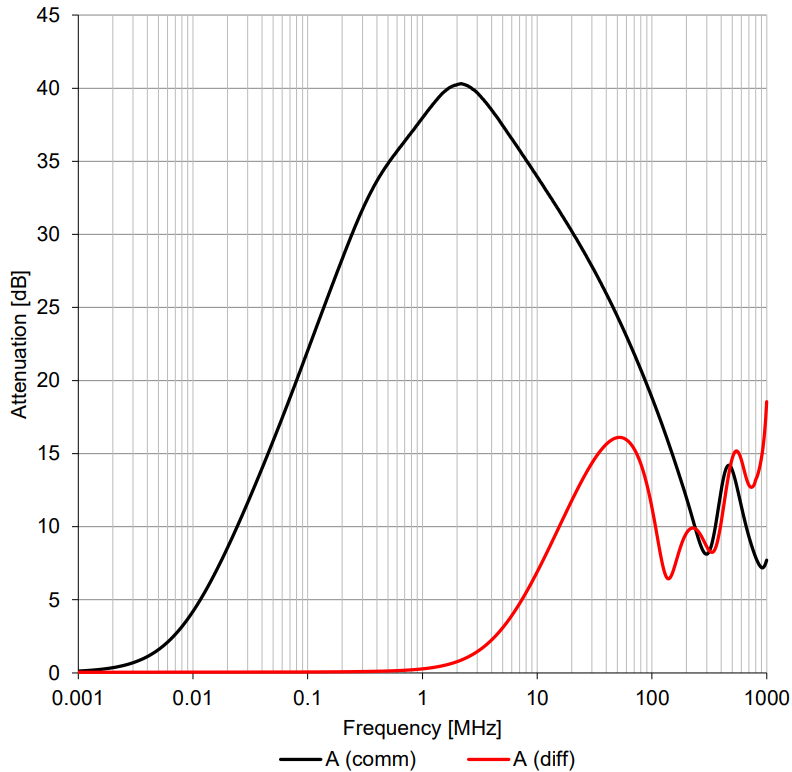
Рис.9 (a) Форма синфазного/диференційного імпедансу (b) Форма втрат вставлення, дБ
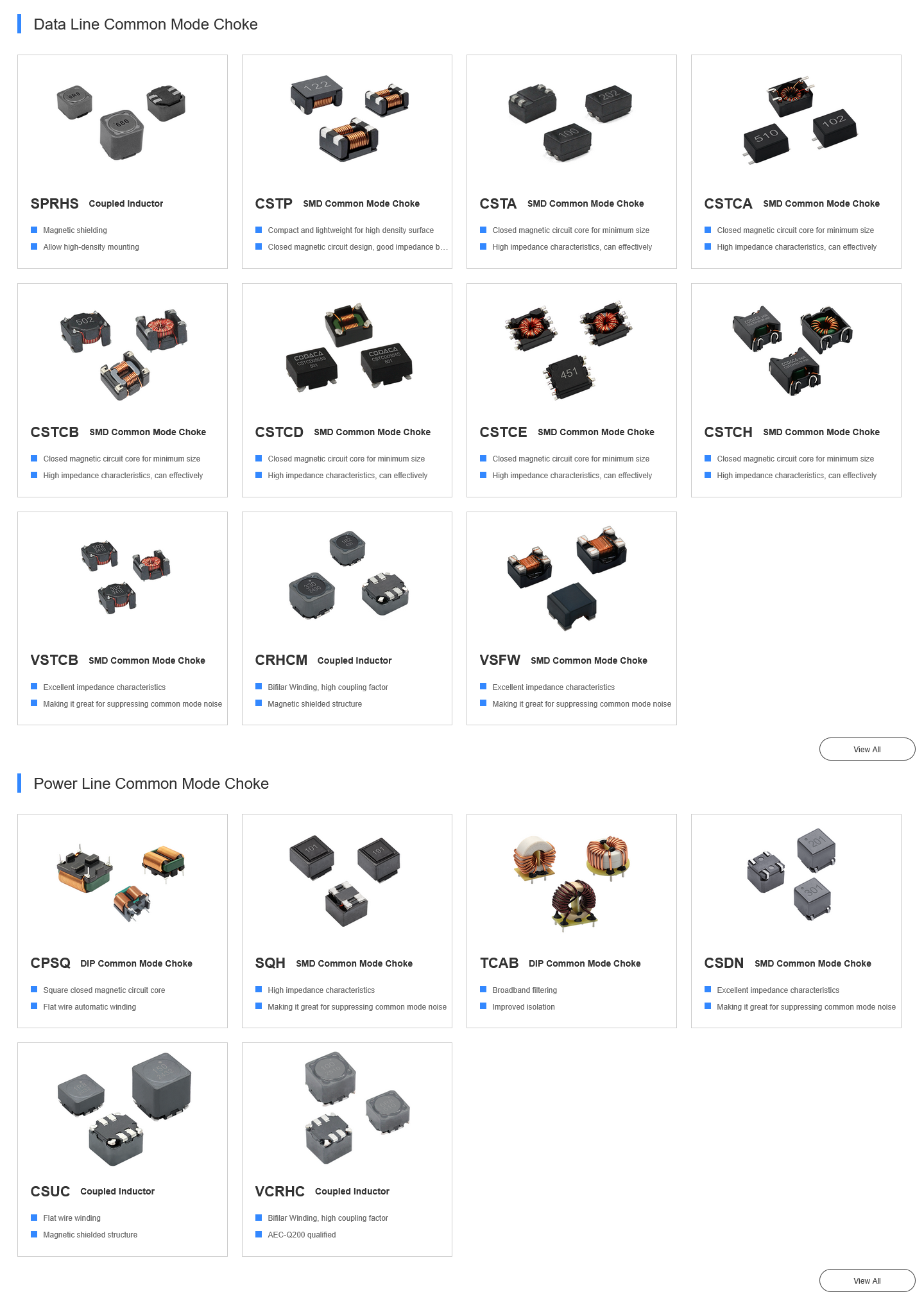
Для одного й того ж синфазного серії, конструкції корпусів різних розмірів підходять для різних розмірів струму та смуг фільтрації: чим більший розмір, тим менший магнітний опір магнітопроводу, що дозволяє зменшити кількість витків обмотки, унаслідок чого можна збільшити діаметр мідного дроту та використовувати більше струмове кільце; чим вище значення індуктивності або нижче стабільна частота магнітної проникності матеріалу, тим вужча застосована смуга фільтрації, і такий синфазний дросель, встановлений в контурі, може не мати ефекту пригнічення шуму на високочастотному кінці.
Codaca Загальні перешкодозахисні дроселі електроніки наразі переважно поділяються на дві частини: сигнальні лінії та силові лінії. Існує понад 10 серій та 50 різних розмірів корпусів, а також майже 300 різних стандартних номерів деталей. Вони широко використовуються в сигнальних лініях, таких як CAN BUS, RS485, і в різних пристроях автономного живлення потужністю від кількох ват до кількох кіловат. Наша команда з НДР також може допомогти користувачам від тестування до аналізу або створити спеціальні технічні умови для завершення відповідних EMC-сертифікацій.
Посилання
[1] Infineon Technologies AG. Engineering_report_DEMO_5QSAG_60W1-AN-v01_00-EN.pdf. www.infineon.com
[2] CODACA Інформація про продукцію - дроселі: www.codaca.com
[3] Clayton R.Paul. Вступ до сумісності електромагнітних характеристик. 2-ге видання. Wiley-interscience.
[4] Bhag Singh Guru and Huseyin R. Hiziroglu. Основи теорії електромагнітного поля. 2-ге видання. Cambridge University Press.
Пояснення щодо захисту прав інтелектуальної власності
CODACA "або" Codaca "є зареєстрованим торговим знаком компанії Shenzhen Codaca Electronic Co., Ltd. Будь-яке використання або посилання на текст, дані або інші типи публічної інформації, що містять об'єкти інтелектуальної власності, опубліковані або розповсюджені компанією Shenzhen Codaca Electronic Co., Ltd., здійснюється в межах прав інтелектуальної власності компанії Shenzhen Codaca Electronic Co., Ltd. Компанія Shenzhen Codaca Electronic Co., Ltd. залишає за собою відповідні заяви щодо інтелектуальної власності, права на захист та інші захисні права. Для уточнення, що у вас не виникає потенційних конфліктів інтелектуальної власності у відповідних питаннях, за необхідності зверніться до компанії Shenzhen Kedajia Electronics Co., Ltd.