
ລິ້ງໄວໆ

ການພັດທະນາຢ່າງວ່ອງໄວຂອງອຸດສາຫະກໍາລົດພະລັງງານໃໝ່ ໄດ້ຂັບເຄື່ອນການຂະຫຍາຍຕົວຢ່າງກ້າວຫນ້າໃນຫລາຍໆຫ້ອງການອຸດສາຫະກໍາ. ຄວາມສາມາດອັດຕະໂນມັດຂອງລົດ ແລະ ການຂັບຂີ່ອັດຕະໂນມັດ ໄດ້ກາຍເປັນທິດທາງການແຂ່ງຂັນທີ່ສຳຄັນທີ່ສຸດສຳລັບລົດພະລັງງານໃໝ່, ເຊິ່ງນຳເອົາຄວາມທ້າທາຍ ແລະ ໂອກາດໃໝ່ໆ ສຳລັບສະຫມອງກາງແບບເຕັມຮູບແບບ ແລະ ໂດເມນຄອນໂທລເລີ, ໂດຍສະເພາະໃນດ້ານຄວາມໜ້າເຊື່ອຖືໄດ້, ຄວາມໜາແໜ້ນພະລັງງານສູງ, EMC ຂອງໄຟຟ້າແບບສະຫຼັບ, ປະສິດທິພາບສູງ ແລະ ລາຄາຕໍ່າແຕ່ມີປະສິດທິພາບສູງຂອງໄຟຟ້າ DC-DC.
Qualcomm, ເປັນຜູ້ສະໜອງຕົວຄວບຄຸມໂດເມນຫ້ອງໂດຍສານອັດສະລິຍະ, ມີຕຳແໜ່ງທີ່ສຳຄັນດ້ວຍ SA8155 ແລະ SA8295. ຄວາມຂັດແຍ້ງລະຫວ່າງກະແສໄຟຟ້າຊົ່ວຄາວ, ກະແສໄຟຟ້າໃນສະຖານະການເຮັດວຽກຢ່າງເຂັ້ມງວດ, ປະສິດທິພາບພະລັງງານໃນສະຖານະພັກ, ຕົ້ນທຶນ, ແລະ ການອອກແບບ EMC ຂອງພະລັງງານຫຼັກຂອງ SOC ຕົວຄວບຄຸມໂດເມນກາງ (ພະລັງງານຈາກແບັດເຕີຣີເຂົ້າສູ່ການປ່ຽນແປງຂັ້ນຕົ້ນ) ໄດ້ກາຍເປັນຄວາມທ້າທາຍໃຫຍ່ສຳລັບການອອກແບບພະລັງງານ BUCK. ວິທີການແກ້ໄຂ ແລະ ຖ່ວງດຸນຄວາມຂັດແຍ້ງເຫຼົ່ານີ້ ແມ່ນທິດທາງດ້ານເຕັກນິກທີ່ສະຖາປັດຕິຍະກຳພະລັງງານໄຟຟ້າ, ຊິບພະລັງງານ, ຂດລວດ, MOSFETs ແລະ ຕົວເກັບໄຟຟ້າເຮັດວຽກຮ່ວມກັນ.
ບົດຄວາມນີ້ປະສົມປະສານການອອກແບບໄຟຟ້າຫຼັກຂອງຕົວຄວບຄຸມພື້ນທີ່ກາງສຳລັບການນຳໃຊ້ໃນລົດຍົນທີ່ມີການຈ່າຍໄຟຟ້າແບບສະຫຼັບໄຟທີ່ມີການປ່ຽນແປງຢ່າງໃຫຍ່ (100-300%), ການສຳຫຼວດກ່ຽວກັບການອອກແບບເຄື່ອງຈ່າຍໄຟຟ້າ DC-DC ແບບສະຫຼັບ, ລວມເຖິງວິທີການແກ້ໄຂດ້ານພະລັງງານ, ວິທີການເລືອກຂດລວດ (inductor) ແລະ ຕົວເກັບໄຟ (capacitor). ມັນໄດ້ປຶກສາ ແລະ ດຳເນີນການອອກແບບທີ່ເປັນຈິງ ໃນຂະນະທີ່ຮັບມືກັບຄວາມທ້າທາຍດ້ານຂະໜາດ, ຕົ້ນທຶນ, ປະສິດທິພາບ ແລະ ຄຸນນະພາບ.
ບົດຄວາມນີ້ໃຊ້ຕົວຄວບຄຸມພື້ນທີ່ SA8295 ຂອງ Qualcomm ເປັນຕົວຢ່າງ ເພື່ອສຳຫຼວດ ແລະ ດຳເນີນການອອກແບບເຄື່ອງຈ່າຍໄຟຟ້າ BUCK ຫຼັກແບບສະຫຼັບ.
ຊຸດບົດຄວາມນີ້ປະກອບດ້ວຍສາມສ່ວນ (ຈະໄດ້ຮັບການອັບເດດຢ່າງຕໍ່ເນື່ອງ):
01- ການຖອດລະຫັດການອອກແບບໄຟຟ້າຂັ້ນທຳອິດຂອງຕົວຄວບຄຸມພື້ນທີ່ລົດຍົນ Qualcomm: ການອອກແບບ ແລະ ການຄິດໄລ່ໄຟຟ້າ (ບົດນີ້)
1- ເປົ້າໝາຍ ແລະ ຄວາມຫຍຸ້ງຍາກໃນການອອກແບບ
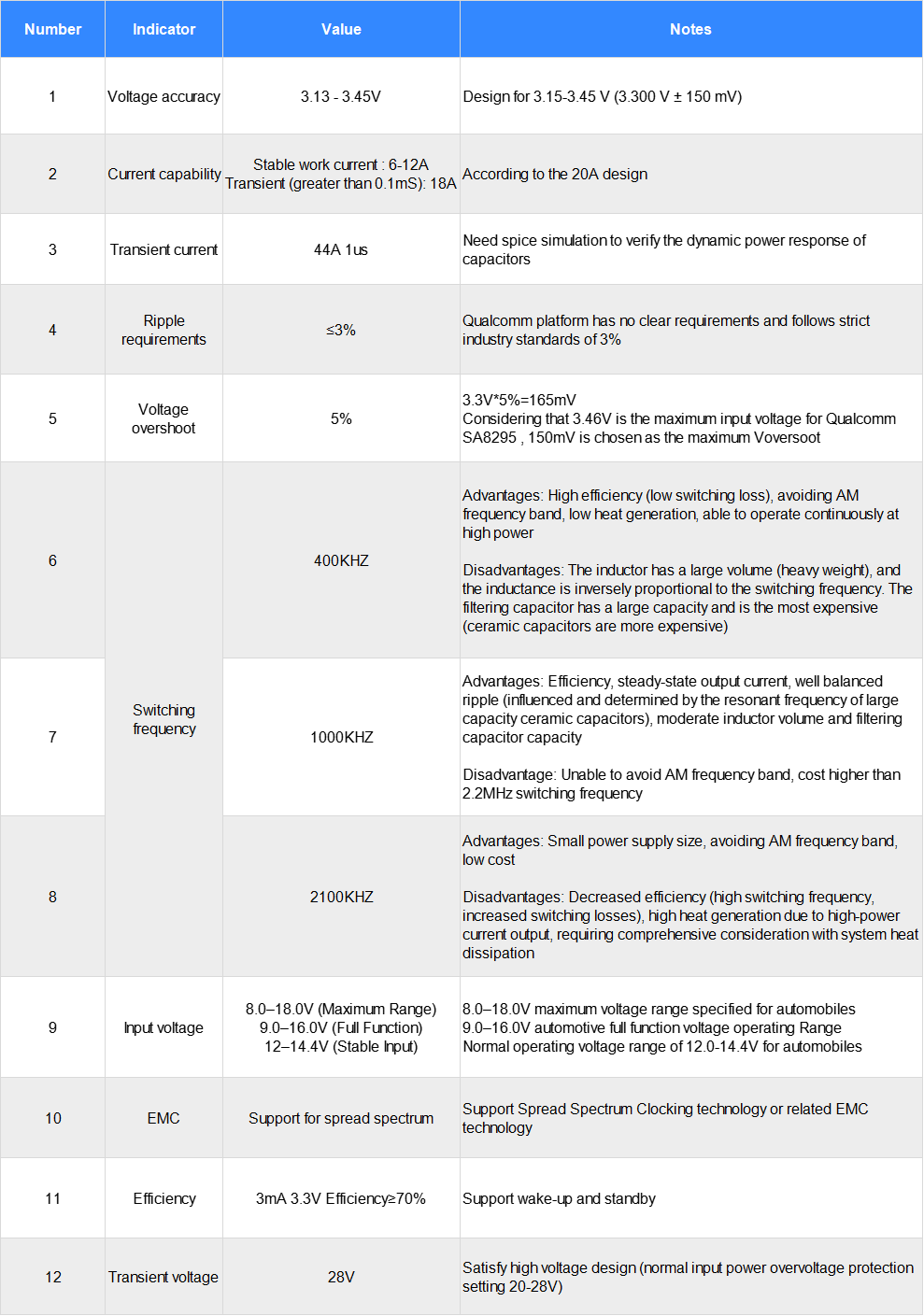
1.1 ຄວາມຕ້ອງການໄຟຟ້າຊົ່ວຄາວສຳລັບ SA8295

ຕາຕະລາງ 1: ຄວາມຕ້ອງການການອອກແບບໄຟຟ້າຂອງ SA8295
1.2 ຄວາມຕ້ອງການກະແສໄຟຟ້າຢູ່ສະຖານະ Standby ຂອງ SA8295
ການບໍລິໂພກພະລັງງານຢູ່ສະຖານະ standby ສຳລັບ Qualcomm SOC 3.3V ຢູ່ໃນຂອບເຂດ 4-7.5mA (ລວມທັງການບໍລິໂພກພະລັງງານຂອງໜ່ວຍຄວາມຈຳໃນການ refresh ຕົນເອງ), ສະໜັບສະໜູນການຕື່ນ wake-up ໃນສະຖານະ standby.
ສະໝອງກາງ (Cabin Domain Controller) ງົບປະມານໄຟຟ້າລວມທັງຄືນ 7-10mA (13.5V), ໂມດູນ 4G/5G ໃຊ້ພະລັງງານ 4-5mA ຕໍ່ຕົວ, Qualcomm SA8295 ປັດຈຸບັນ 13.5V 3mA (40mW) ຫຼື ຕ່ຳກວ່າ.
1.3 ສາມຄວາມຫຍຸ້ງຍາກ
1.3.1 ບັນຫາ 1: ການສະຫຼັບແຫຼ່ງຈ່າຍໄຟຟ້າຂອງ Qualcomm Domain Controller SA8295
ກະແສໄຟຟ້າຊົ່ວຄາວໃຫຍ່, 3.3V, 18 ແອັມເພີ (0.1ms), 0.1ms ແມ່ນໄລຍະເວລາທີ່ຍາວຄາຍໃນສະຖານະການຜົນຜະລິດຄົງທີ່ສຳລັບແຫຼ່ງຈ່າຍໄຟຟ້າ DC-DC, ຕ້ອງການອອກແບບແຫຼ່ງຈ່າຍໄຟຟ້າ buck ເພື່ອໃຫ້ຜົນຜະລິດຄົງທີ່ 18 ແອັມເພີ.
1.3.2 ບັນຫາ 2: ການເຮັດວຽກແຫຼ່ງຈ່າຍໄຟຟ້າແບບເຄື່ອນໄຫວຂອງ High-Quality Domain Controller SA8295
ກະແສໄຟຟ້າປົກກະຕິຂອງ domain controller SA8295 ແມ່ນ 5-9 ແອັມເພີ, ເຊິ່ງຈະເຮັດໃຫ້ມີຄວາມແຕກຕ່າງຂອງກະແສໄຟຟ້າປົກກະຕິຫຼາຍກວ່າ 300% ໃນຂດລວງ (inductance) ຂອງແຫຼ່ງຈ່າຍໄຟຟ້າແບບສະຫຼັບ (ຄວາມລວງແມ່ນຜັນກັບກະແສໄຟຟ້າທີ່ກຳນົດໄວ້) ໃນດ້ານຂະໜາດ, ຕົ້ນທຶນ ແລະ ຄວາມຖີ່, ສ້າງຄວາມຂັດແຍ້ງຢ່າງຫຼວງຫຼາຍ.
1.3.3 ບັນຫາ 3: ປະສິດທິພາບແຫຼ່ງຈ່າຍໄຟຟ້າໄຟຟ້ານ້ອຍຂອງ High-Quality Domain Controller SA8295
ການບໍລິໂภກພະລັງງານຢູ່ສະຖານະພັກ, ມີປະສິດທິພາບ 70% ທີ່ 13.5V 3mA, ເຮັດໃຫ້ເກີດຄວາມທ້າທາຍຢ່າງໃຫຍ່ຫຼວງຕໍ່ອາການຄວບຄຸມພະລັງງານ ແລະ ການອອກແບບເລືອກຊິ້ນສ່ວນຂດລວດ.
ການອອກແບບນີ້ ອີງໃສ່ຄວາມທ້າທາຍຂອງການອອກແບບພະລັງງານຫຼັກ SA8295 ທີ່ໃຫຍ່ທີ່ສຸດ, ສຳຫຼວດຫຼັກການຍາກຂອງເທັກໂນໂລຊີໄຟຟ້າສະຫຼັບ ແລະ ແກ້ໄຂບັນຫາເທັກໂນໂລຊີ DC-DC.
2- ການປຽບທຽບການເລືອກແກ້ໄຂ
2.1 ຄວາມຕ້ອງການດ້ານວິຊາການຂອງ Qualcomm SA8295 domain control power supply
ດັ່ງທີ່ສະແດງໃນຕາຕະລາງ 2:
ຕາຕະລາງ 2: ຄວາມຕ້ອງການດ້ານວິຊາການການອອກແບບພະລັງງານ Qualcomm SA8295
2.2 ແຜນການອອກແບບ ແລະ ເອກະສານດ້ານວິຊາການ
MPQ2918, MPQ2930, LM25141-Q1, MAX20098, LTC7803, LM25149-Q1, ແລະ ອື່ນໆ ສາມາດຕອບສະໜອງຄວາມຕ້ອງການການອອກແບບໄດ້. ການອອກແບບນີ້ເລືອກ LM25149-Q1 ເປັນແຜນການອອກແບບພະລັງງານຫຼັກສຳລັບຕົວຄວບຄຸມພູມິພາກສູນກາງຂອງໂຄງການນີ້.
2.2.1 ທີ່ຢູ່ທາງການຂອງ LM25149-Q1:
https://www.ti.com.cn/product/cn/LM25149-Q1?keyMatch=LM25149-Q1
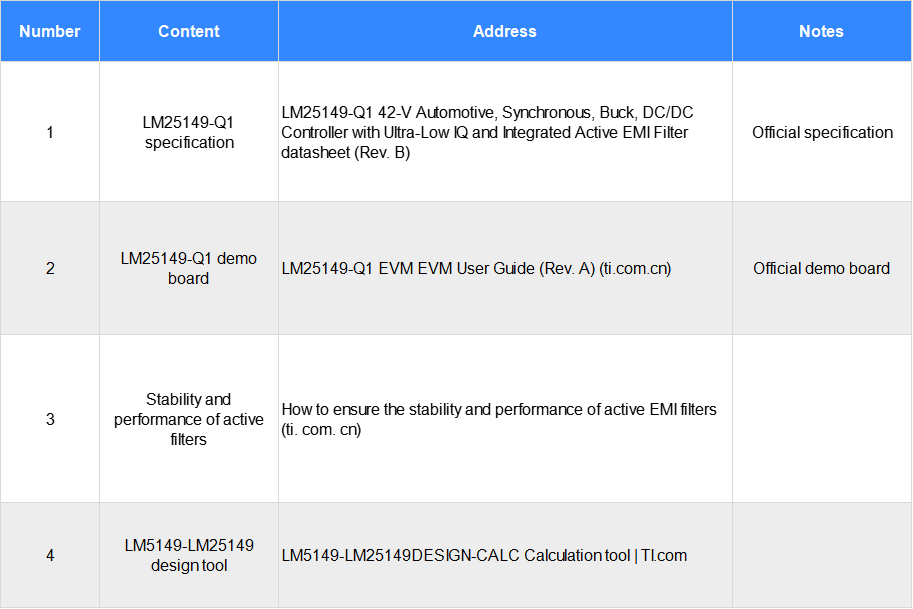
ຕາຕະລາງ 3: ວັດສະດຸການອ້າງອີງການອອກແບບ LM25149-Q1
2.2.2 ເອກະສານຂໍ້ກຳນົດ LM25149-Q1:
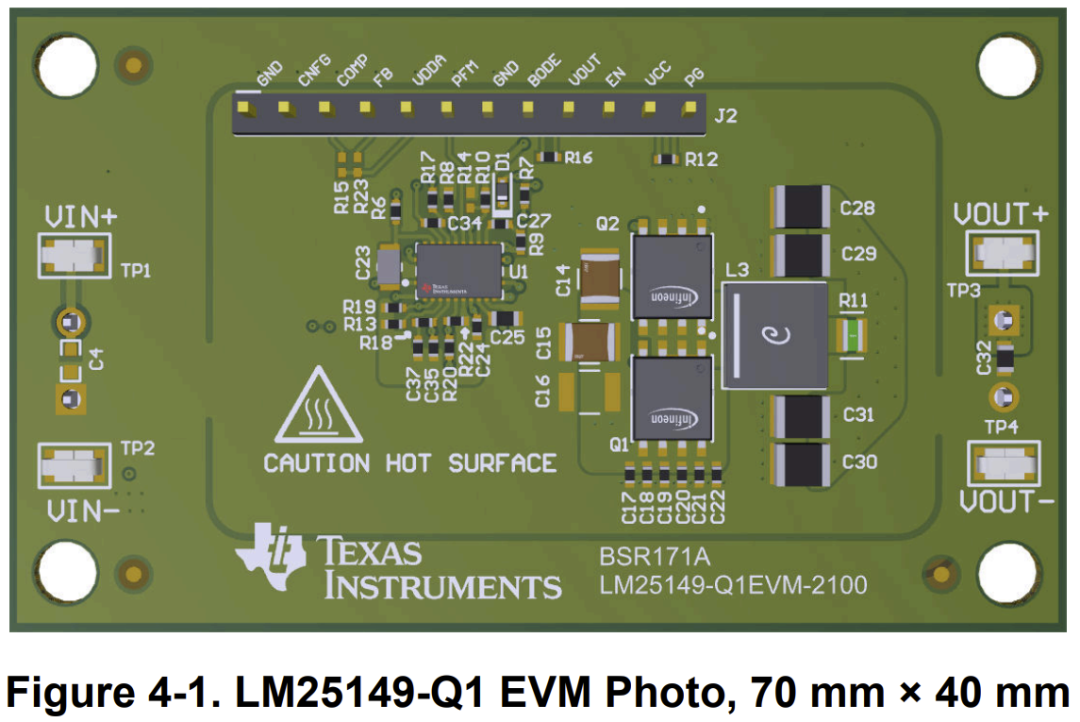
2.2.3 ແຜງພັດທະນາ LM25149-Q1:
ຄູ່ມືຜູ້ໃຊ້ງານ EVM LM25149-Q1 (Rev. A) (ti.com.cn)
2.2.4 ຄວາມສະຖຽນລະພາບຂອງຕົວກັ່ນແບບ active ແລະ ປະສິດທິພາບ:
ວິທີການຮັບປະກັນຄວາມສະຖຽນລະພາບ ແລະ ປະສິດທິພາບຂອງຕົວກັ່ນ EMI Active (ti.com.cn)
2.2.5 LM5149-LM25149 ເຄື່ອງມືການອອກແບບ :
ເຄື່ອງມືຄິດໄລ່ LM5149-LM25149DESIGN-CALC | TI.com
3- ອອກແບບແຫຼ່ງຈ່າຍພະລັງງານ Synchronous BUCK ແລະ ການຄິດໄລ່
3.1 ຂໍ້ກຳນົດຕົ້ນຕໍ ແລະ ພາລາມິເຕີອອກແບບຂອງ LM25149
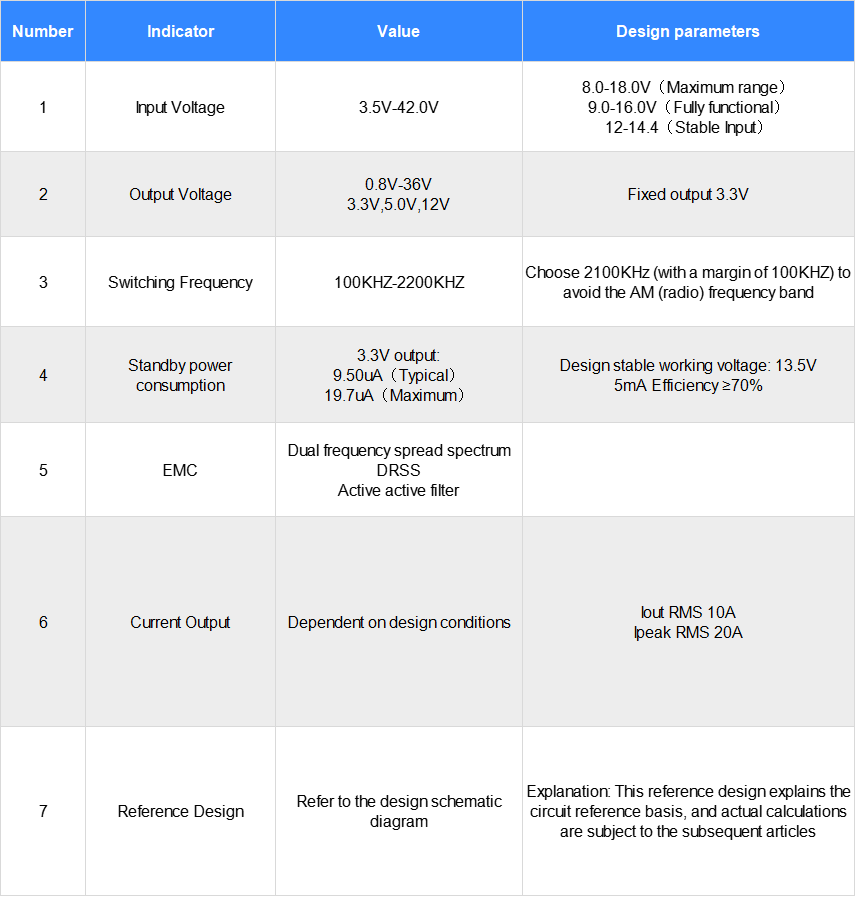
ຕາຕະລາງ 4: ຂໍ້ກຳນົດດ້ານວິຊາການການອອກແບບພະລັງງານ Qualcomm SA8295
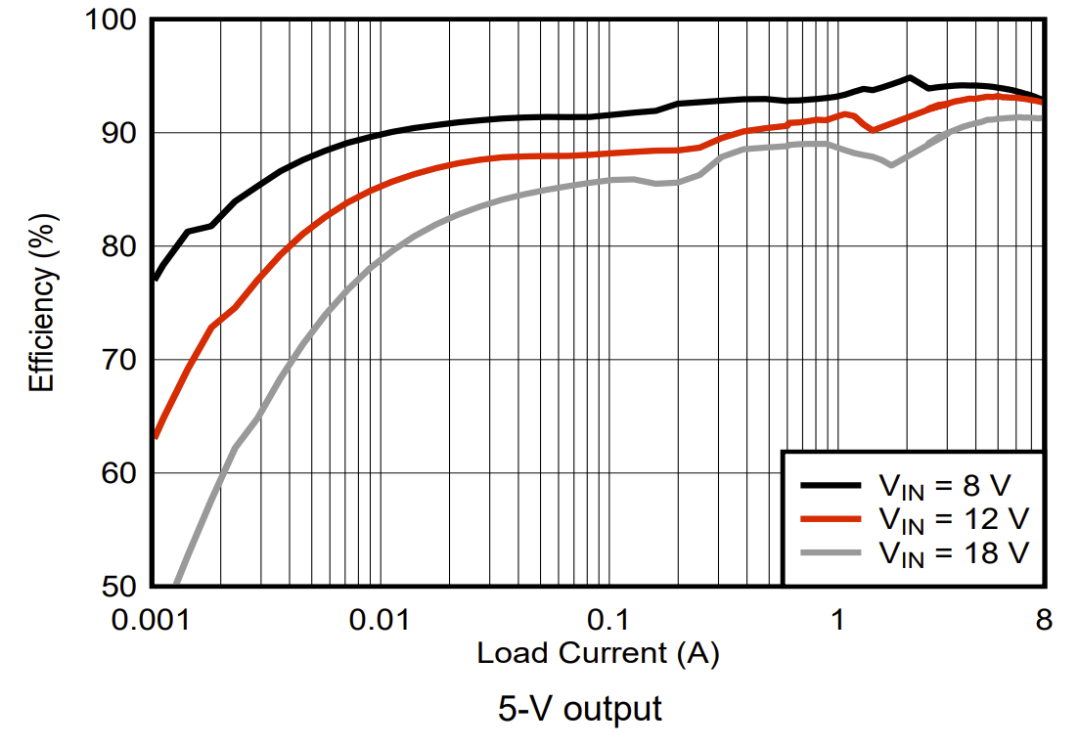
ປະສິດທິພາບ
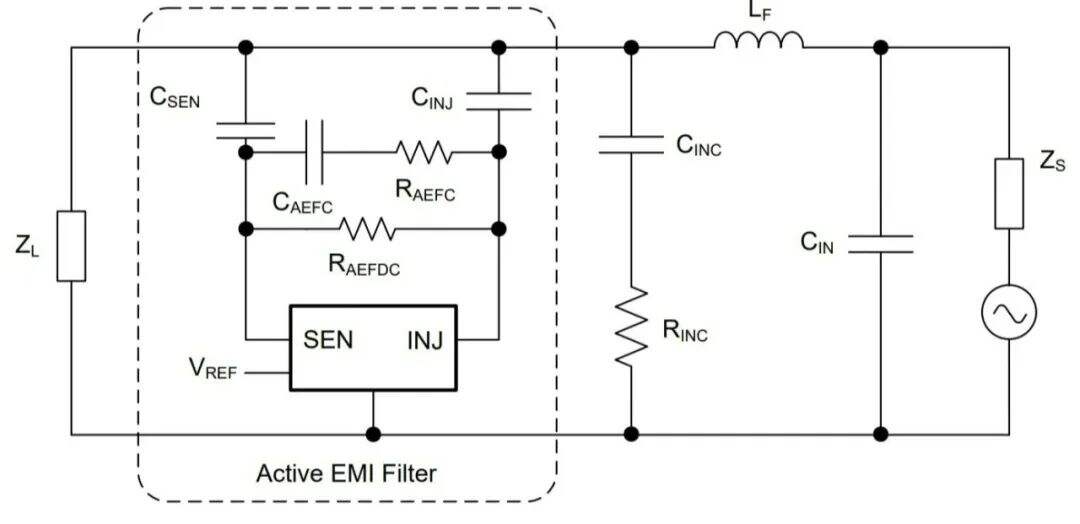
ຕົວກອງ EMI ການເຄື່ອນໄຫວ
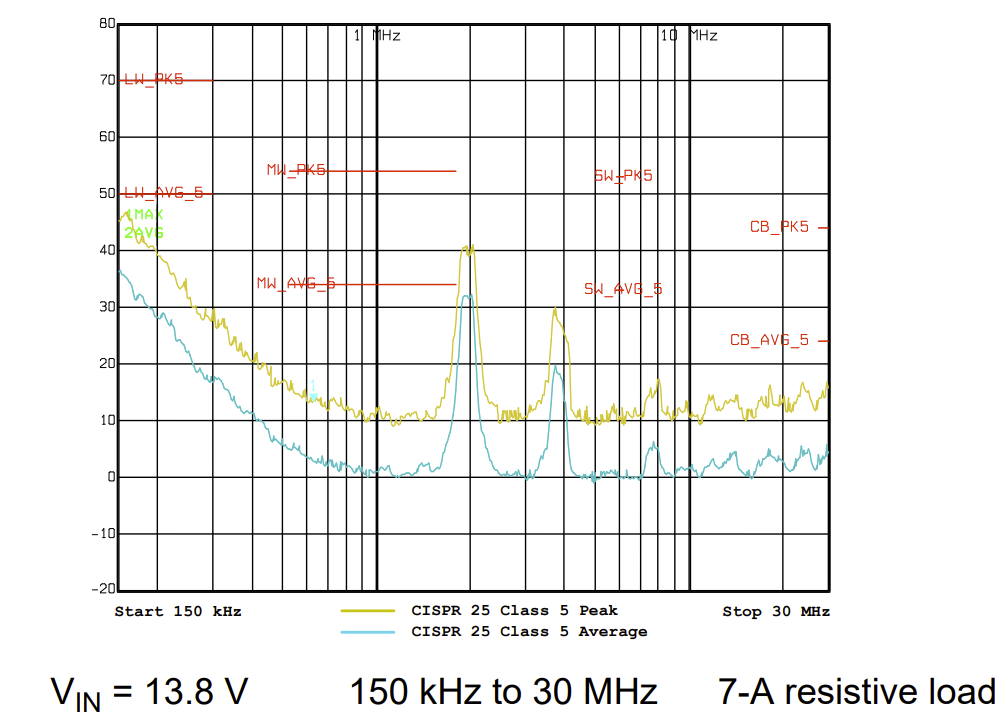
ການທົດສອບ EMI
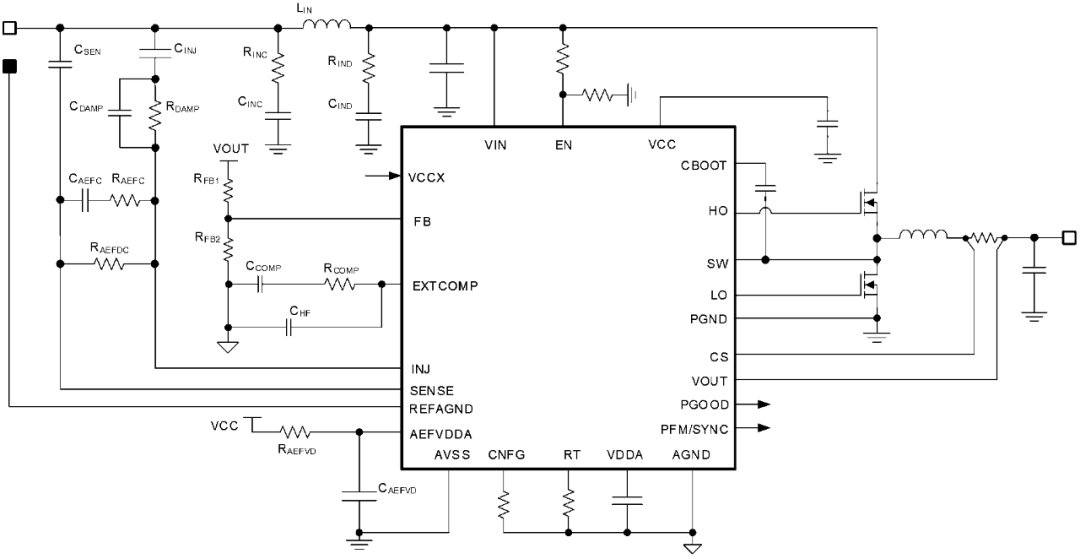
ແຜນຜັງອອກແບບອ້າງອີງ
ກະດານປະເມີນຜົນແກ້ໄຂອອກແບບອ້າງອີງ
3.2 LM25149 ການຄິດໄລ່ເລືອກອິນດັກໂຕຣ Inductor
3.2.1 ສູດຄິດໄລ່ພະລັງງານ BUCK ສົມທົບ:
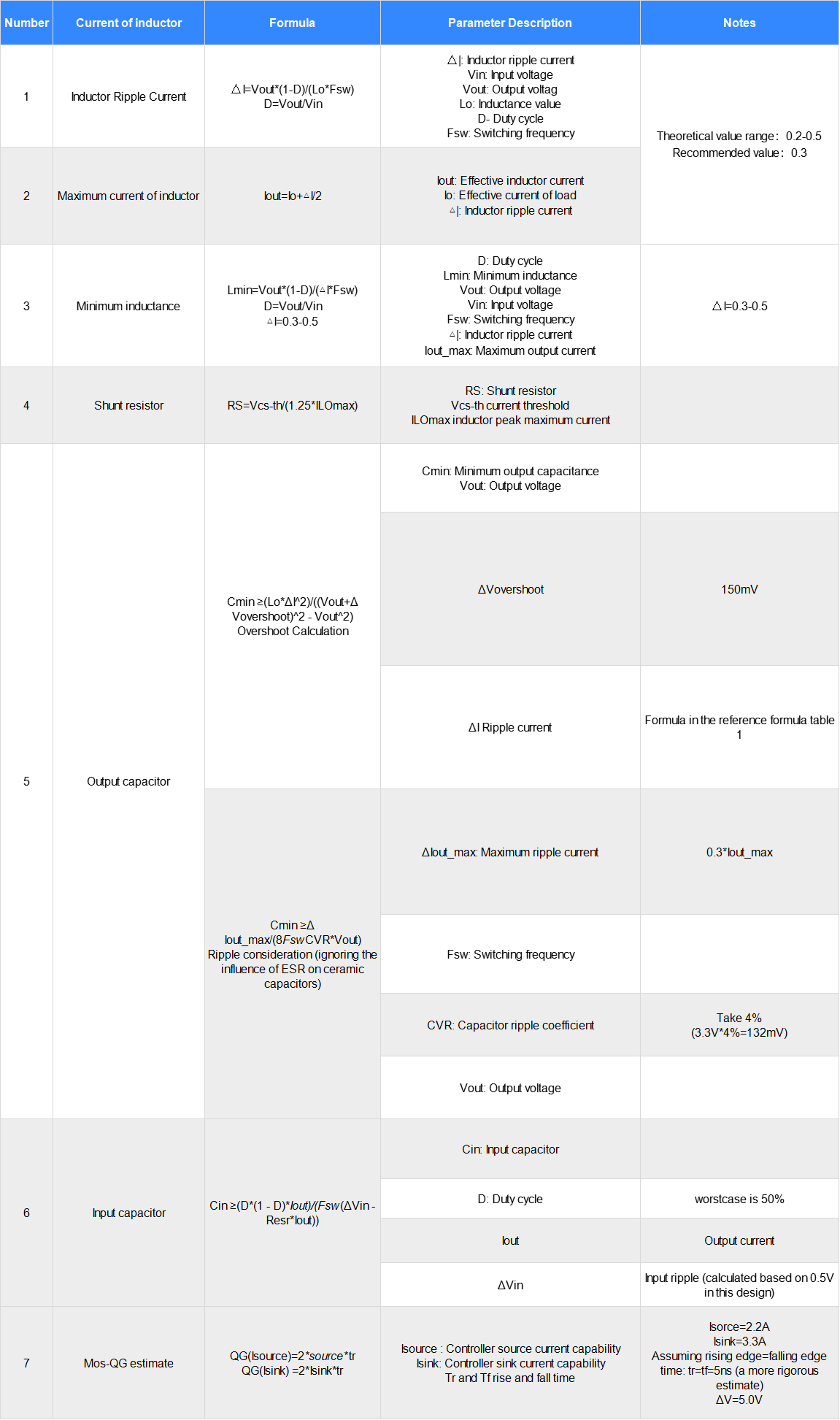
ຕາຕະລາງ 5: ສູດຄຳນວນການອອກແບບໂປຣໄຟຟ້າ BUCK ສະຫມອງ
3.3 ການຄຳນວນຄ່າຂອງຂດລວງຕ່ຳສຸດ
(ສູດຄຳນວນ, ເບິ່ງຕາຕະລາງ 5.)
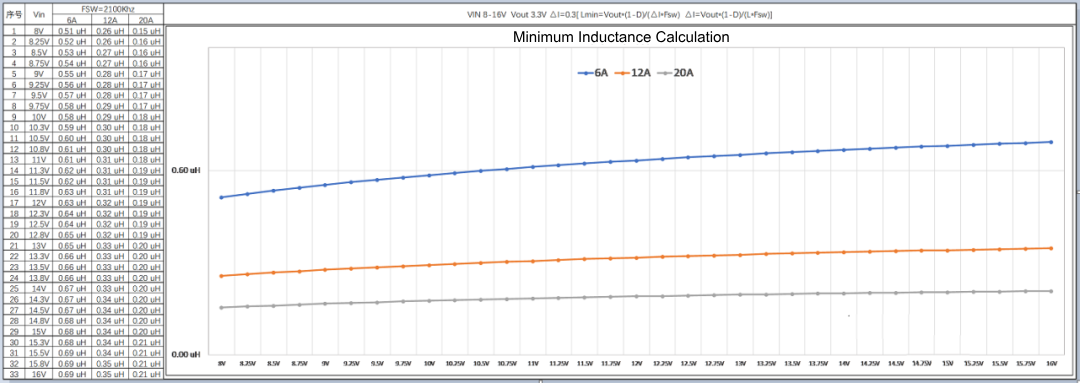
ຕາຕະລາງ 6: ຕາຕະລາງເສັ້ນໂຄ້ງການຄຳນວນຄ່າຂອງຂດລວງຕ່ຳສຸດ (∆I=0.3)
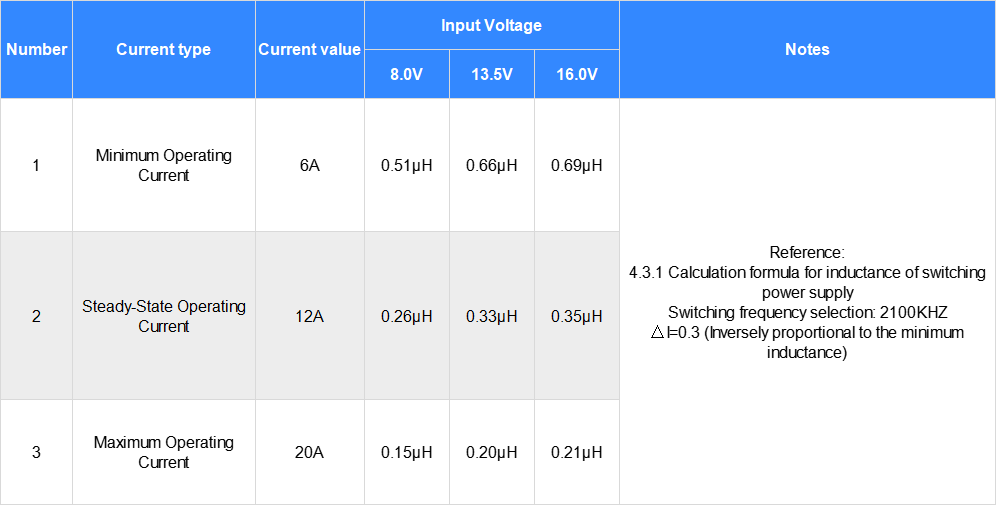
ຕາຕະລາງ 7: ການຄິດໄລ່ອິນດັກແທັງຂັ້ນຕ່ຳ
3.3.1 ສະຫຼຸບຂໍ້ມູນການຄຳນວນຄ່າຂອງຂດລວງ:
① ຖ້າການອອກແບບຄຸ້ມຂອງ 6-20A (AI=0.3 ຄຳນວນ), ມີການປ້ອນ 16V ແລະ ສົ່ງອອກ 6A, ຄ່າຂອງຂດລວງຄວນ ≥0.69μH.
② ການຄິດໄລ່ທາງທິດສະດີຂອງອິນດັກແທັງເຄື່ອງຈັກ SW ≥ 0.69μH (ທາງທິດສະດີ);
③ ພິຈາລະນາການເລືອກອອກແບບຈິງແລະຄວາມທົນທານຂອງຂດລວງ ±20%, ໃຫ້ເລືອກ 0.82μH ແລະ 1.0μH ເປັນການອອກແບບທີ່ດີທີ່ສຸດ (ການເພີ່ມຄ່າຂອງຂດລວງຈະເພີ່ມຂະໜາດ, ຕົ້ນທຶນ ແລະ ຫຼຸດ SRF).
3.4 ການຄຳນວນກະແສໄຟຟ້າຂອງຂດລວງ
(ສູດ: ອ້າງອີງຕາຕະລາງ 5, ລາຍການ 1 ແລະ 2)
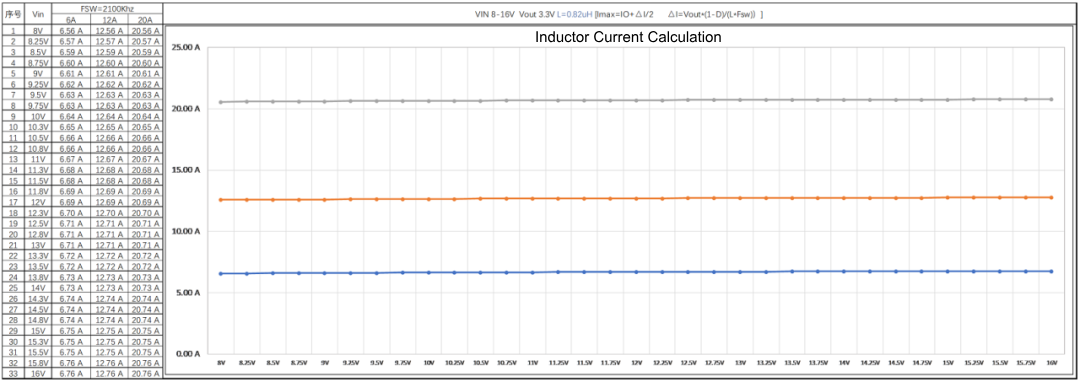
ຕາຕະລາງ 8: 0.82μH ການຄິດໄລ່ກະແສໄຟຟ້າຂອງອິນດັກເຕີ
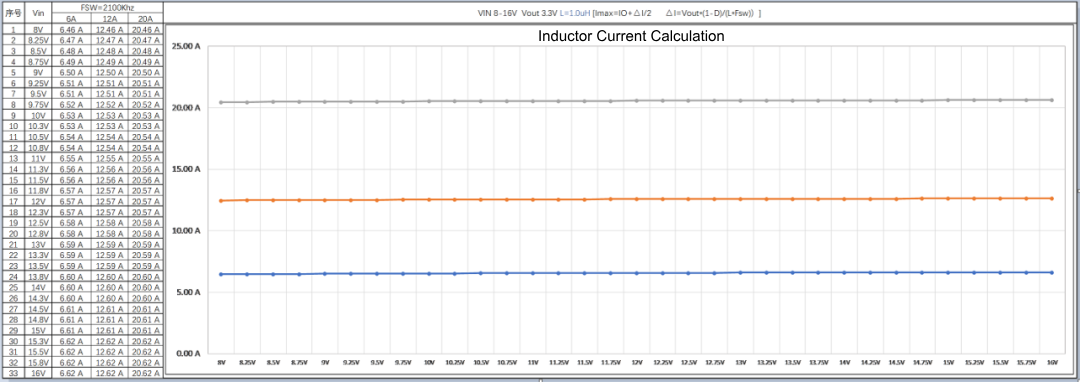
ຕາຕະລາງ 9: 1.0μH ການຄິດໄລ່ກະແສໄຟຟ້າຂອງອິນດັກເຕີ
3.4.1 ກະແສສັ້ນຈາກທິດສະດີຂອງຂດລວງ ≥ 20.76A, ປັດໃຫ້ເປັນ 21A:
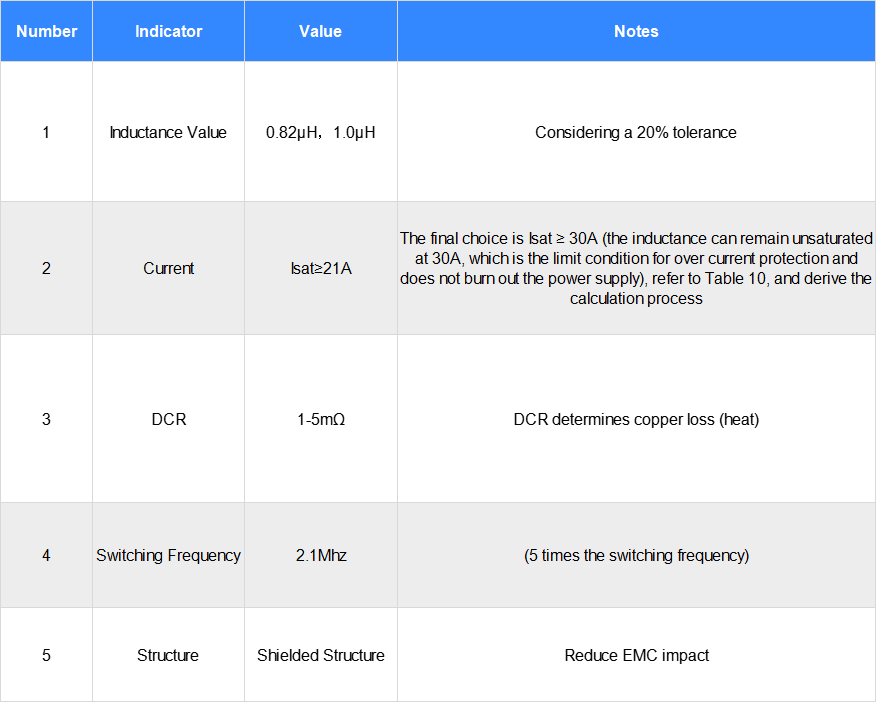
ຕາຕະລາງ 10: ຂໍ້ ກໍາ ນົດຂອງເຄື່ອງດັດແປງ
4- ການເລືອກເຄື່ອງດັດແປງ ສໍາ ລັບການສະ ຫນອງ ພະລັງງານປ່ຽນ
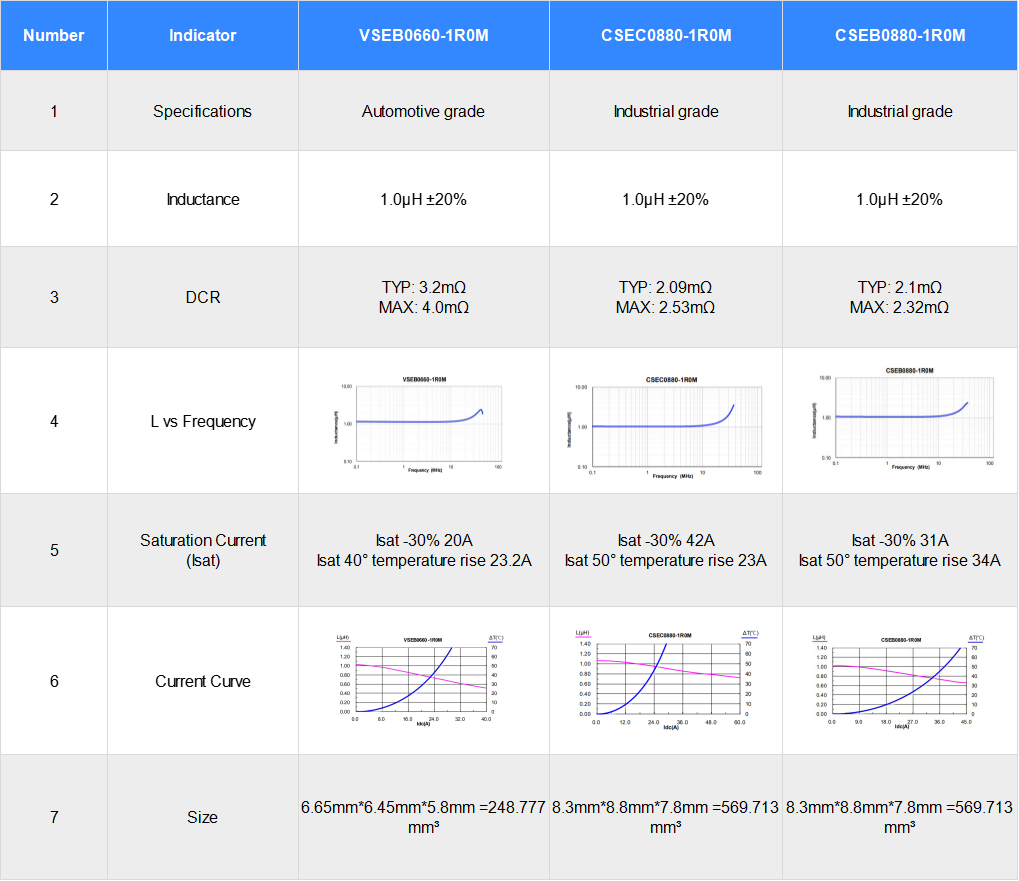
ຕາຕະລາງ 11: ການເລືອກອິນດັກເຕີ
4.1 ການຄິດໄລ່ຂອງປະຈຸບັນການເກັບຕົວຢ່າງ resistor ການປ່ຽນພະລັງງານການສະຫນອງສໍາລັບ LM25149
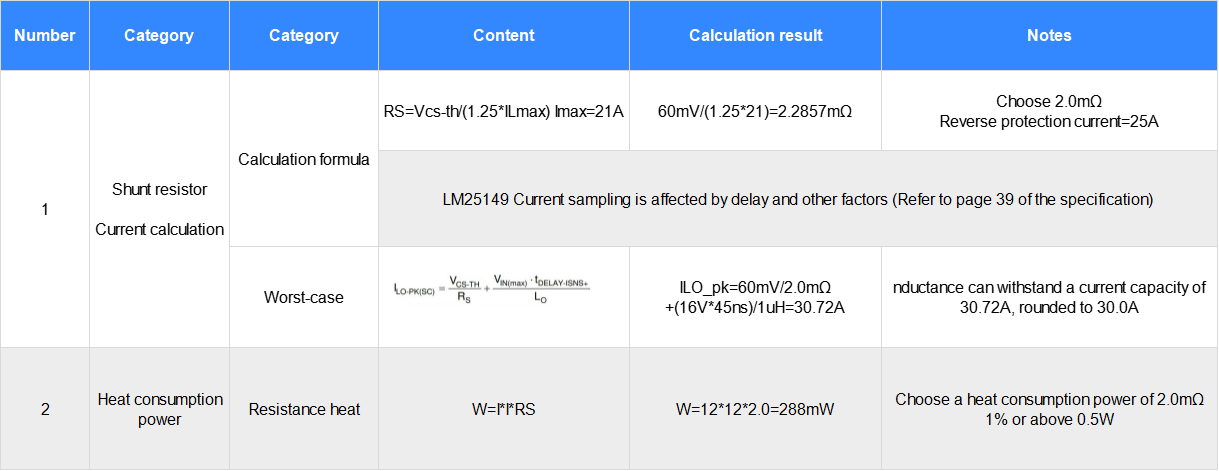
ຕາຕະລາງ 12: ການຄິດໄລ່ທາງທິດສະດີຂອງ resistor ການເກັບຕົວຢ່າງໃນປະຈຸບັນ
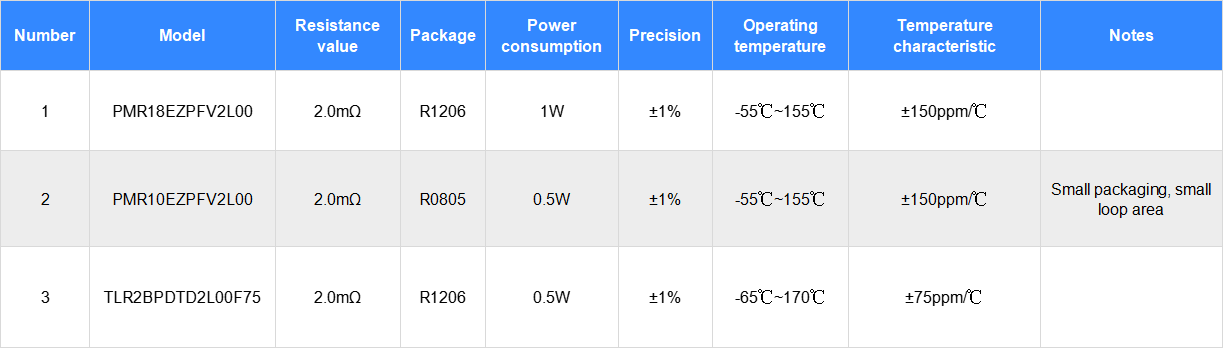
ຕາຕະລາງ 13: ການເລືອກຕົວແທນຕ້ານການເກັບຕົວຢ່າງໃນປະຈຸບັນ
4.2 ການຄິດໄລ່ຂອງ Output Capacitor ສໍາລັບການສະຫນອງພະລັງງານການປ່ຽນ synchronous BUCK
(ການຄິດໄລ່ເຄື່ອງປະມວນຜົນຜົນ: ອ້າງອີງໃສ່ສະສົມໃນຕາຕະລາງ 5)
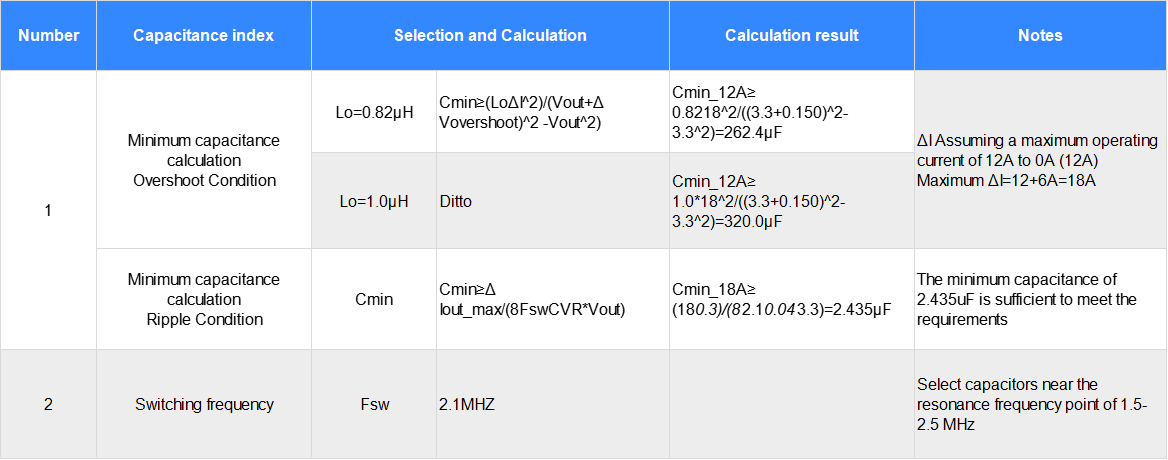
ຕາຕະລາງ 14: ການຄິດໄລ່ຂອງ Output Capacitor ສໍາລັບການສະຫນອງພະລັງງານການປ່ຽນແບບ synchronous BUCK
ສຳລັບການອອກແບບເຄື່ອງຈັກໄຟຟ້າ buck ສະຫຼັບແບບຮ່ວມກັນ, ມີການຊົດເຊີຍລະຫວ່າງປະສິດທິພາບ, ຂະໜາດ ແລະ ຕົ້ນທຶນຂອງຕົວເກັບໄຟຟ້າປ້ອນ ແລະ ຕົວເກັບໄຟຟ້າຜົນໄດ້ຮັບ. ການທົດສອບຂໍ້ກຳນົດຕົວເກັບໄຟຟ້າຖືກດຳເນີນໃນເງື່ອນໄຂໂດຍສະເພາະ, ແລະ ຄວາມແຕກຕ່າງຂອງເຄື່ອງມືໃນຂະນະທົດສອບອາດເຮັດໃຫ້ມີຄວາມຜິດພາດ 10–50% ສຳລັບຂໍ້ກຳນົດທີ່ຄືກັນ. ປະສິດທິພາບການອອກແບບສຸດທ້າຍຕ້ອງການການຢັ້ງຢືນ ແລະ ການທົດສອບທາງວິທະຍາສາດຜ່ານຂະບວນການດີບັກ (ບໍ່ມີວິທີແກ້ໄຂດຽວທີ່ດີທີ່ສຸດ; ພຽງແຕ່ການເລືອກແຜນການທີ່ເໝາະສົມກັບການນຳໃຊ້ໂດຍສະເພາະ).
ຕົວເກັບໄຟຟ້າສະຫຼັບຕ້ອງຕອບສະໜອງ: ຄວາມຈຸ ≥ 320uF (ຂໍ້ກຳນົດການເກີນ), ຄວາມຈຸຕົວເກັບໄຟຟ້າເຊີຣາມິກຫຼາຍກວ່າ 2.435uF (ບໍ່ແມ່ນເງື່ອນໄຂຫຼັກ, ພຽງແຕ່ຕອບສະໜອງຂໍ້ກຳນົດກໍພຽງພໍ).
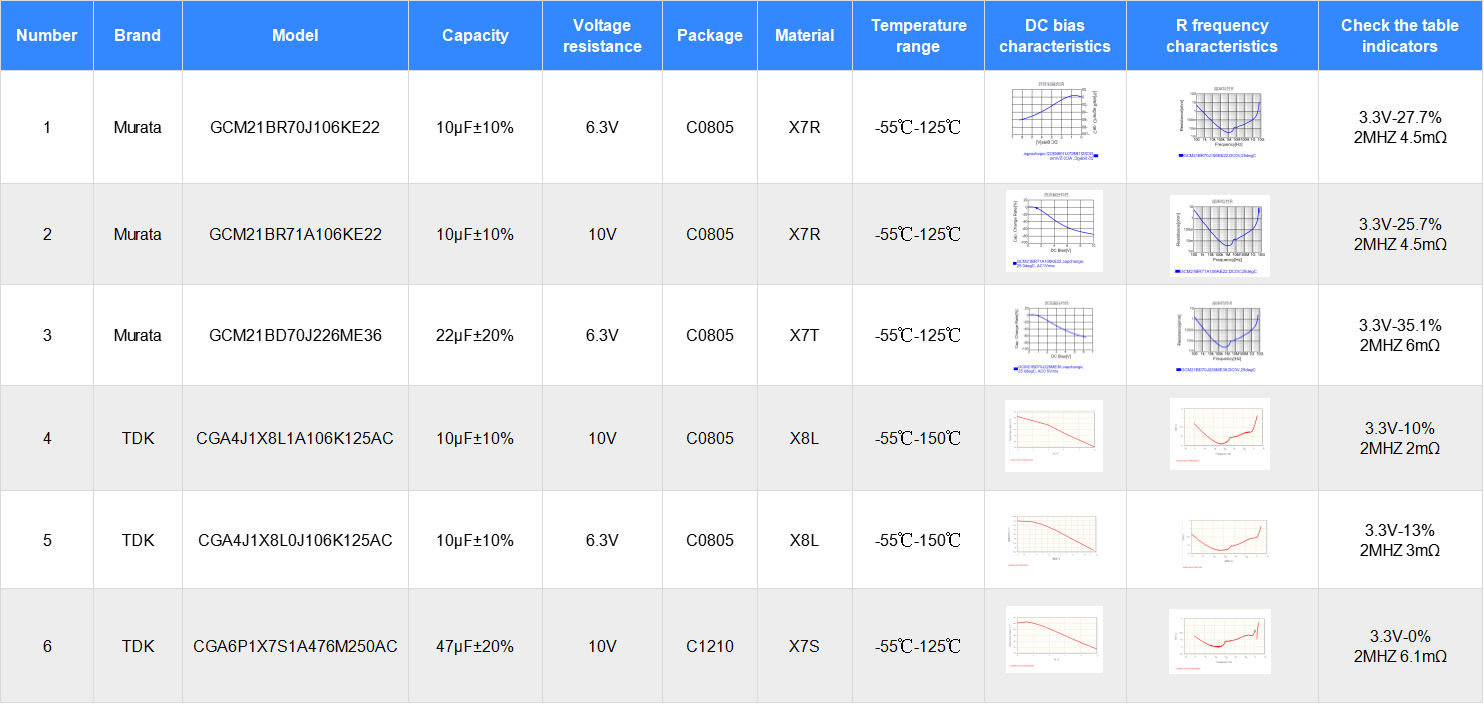
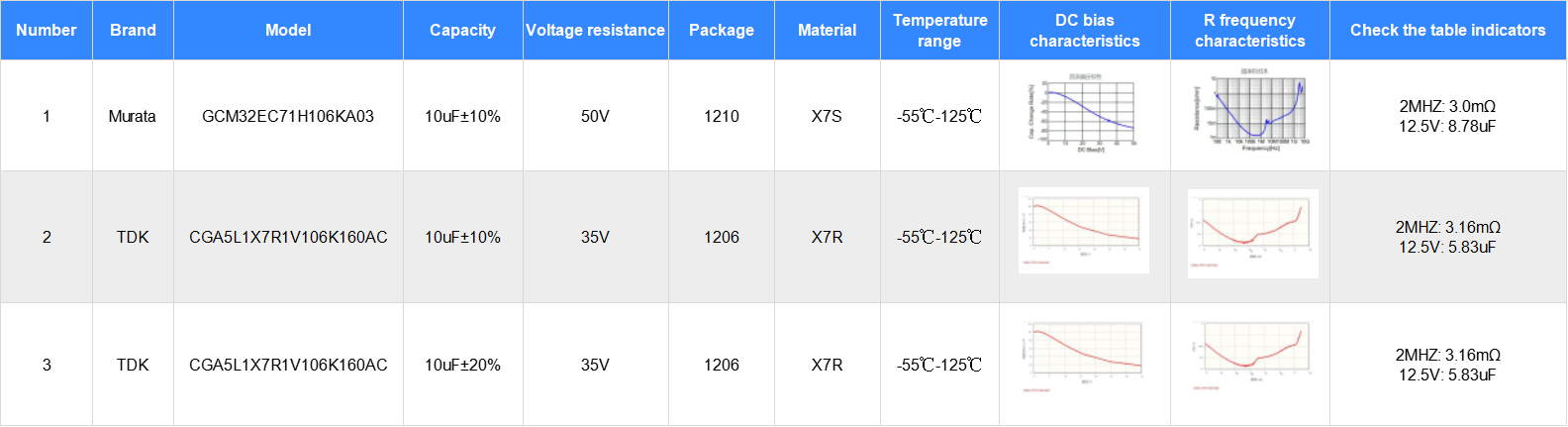
ຕາຕະລາງ 15: ການເລືອກແບບທີ່ແນະນຳສຳລັບຕົວເກັບໄຟຟ້າຕົວກອງຜົນໄດ້ຮັບສຳລັບເຄື່ອງຈັກໄຟຟ້າສະຫຼັບ
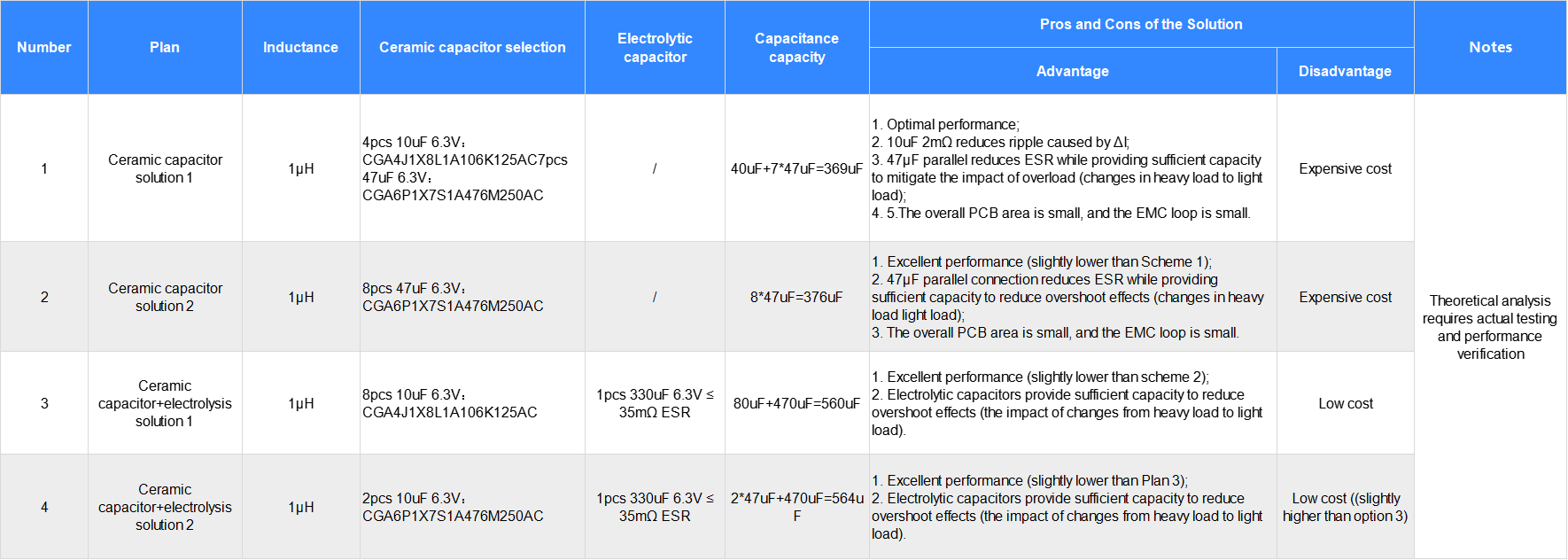
ຕາຕະລາງ 16: ການອອກແບບຕົວເກັບໄຟຟ້າຕົວກອງຜົນໄດ້ຮັບສຳລັບເຄື່ອງຈັກໄຟຟ້າສະຫຼັບ
4.3 ການຄຳນວນຕົວເກັບໄຟຟ້າປ້ອນສຳລັບຜູ້ສະໜອງໄຟຟ້າ LM25149
4.3.1 ການຄິດໄລ່ຄວາມສາມາດຂອງແຜ່ນຮັບ

ຕາຕະລາງ 17: ການຄຳນວນຕົວກອງໄຟຟ້າຂາເຂົ້າສຳລັບພະລັງງານຈ່າຍປ່ຽນແປງ
ຕາຕະລາງ 18: ການເລືອກຕົວກອງໄຟຟ້າຂາອອກສຳລັບພະລັງງານຈ່າຍປ່ຽນແປງ
4.4 LM25149 ການຄິດໄລ່ເພື່ອເລືອກ Mosfet
4.4.1 ການຄຳນວນ MOSFET
ໃນຂໍ້ມູນດ້ານເຕັກນິກຂອງ LM25149 ບໍ່ໄດ້ລວມເອົາການຄຳນວນຫຼືການເລືອກຫຼາຍຢ່າງ. ການຄຳນວນ QG ແລະ ການເລືອກແມ່ນອີງໃສ່ການປະເມີນຄ່າຕາມປະສົບການ ແລະ ການຫັນກັບມາຄິດໄລ່. ຜົນການຄຳນວນຊີ້ໃຫ້ເຫັນຄ່າ Vgs ຢູ່ທີ່ 4.5-5.0V ແລະ ≤22nC. ຂະບວນການຄຳນວນຖືກສະແດງໃນຕາຕະລາງຂ້າງລຸ່ມນີ້. ເວທີ Miller ແມ່ນຖືກເລືອກໃນຂອງ 2-3V (ກໍ່ຍອມຮັບໄດ້ຖ້າໃກ້ກັບ 3V), ແລະ Rdson ແມ່ນຖືກເລືອກໃຫ້ ≤8mΩ.
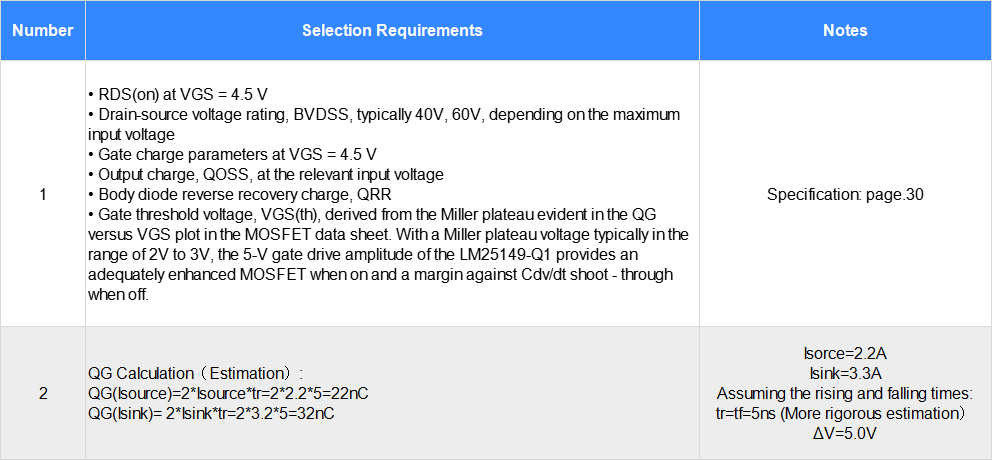
ຕາຕະລາງທີ 19: ການເລືອກ ແລະ ການຄິດໄລ່ Mosfet
4.5 ຄຳແນະນຳການເລືອກ Mosfet
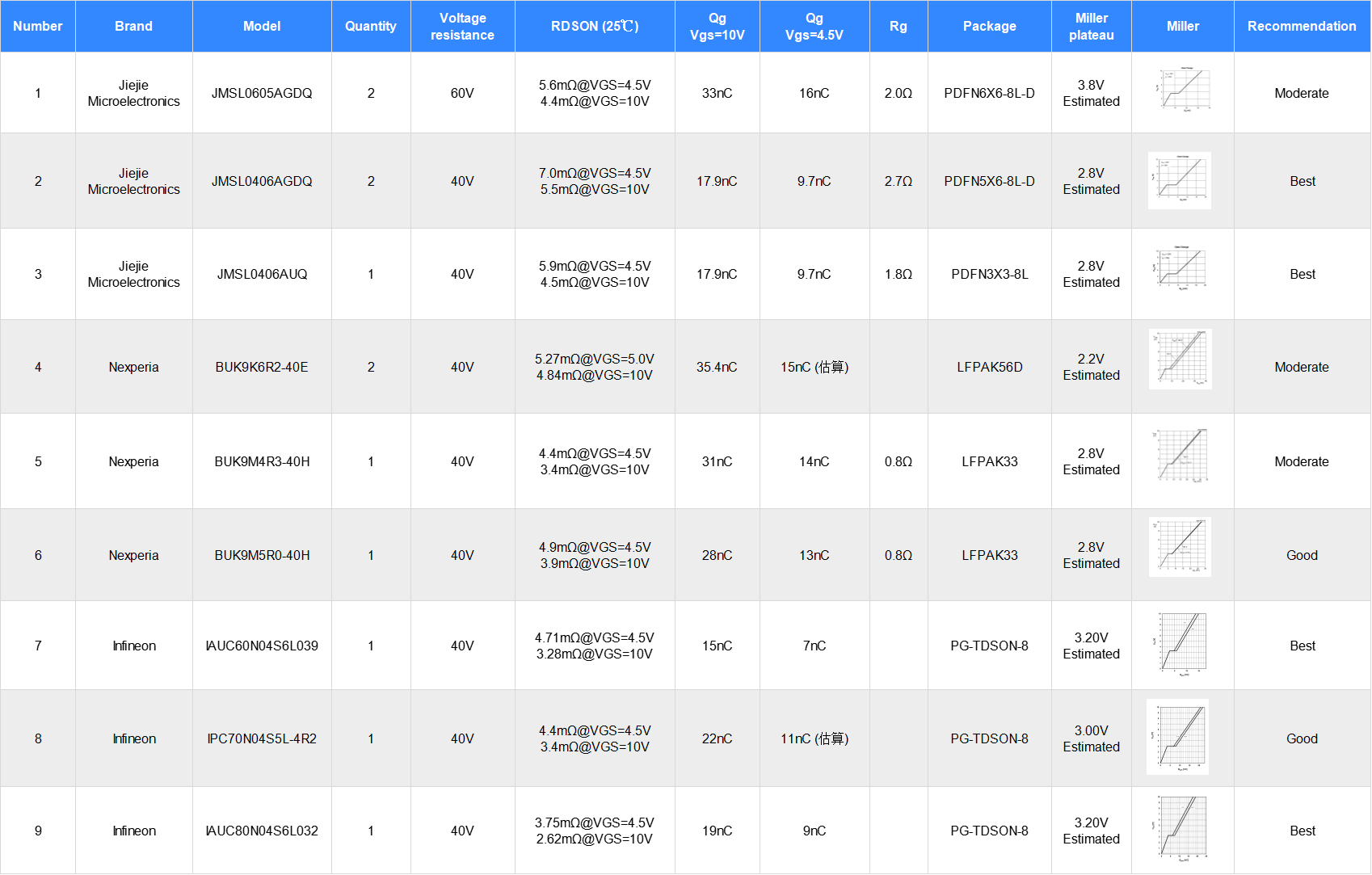
ຕາຕະລາງທີ 20: ຮຸ່ນການເລືອກ Mosfet
4.6 LM25149 FB ແລະ ການຄິດໄລ່ຊົດເຊີຍ
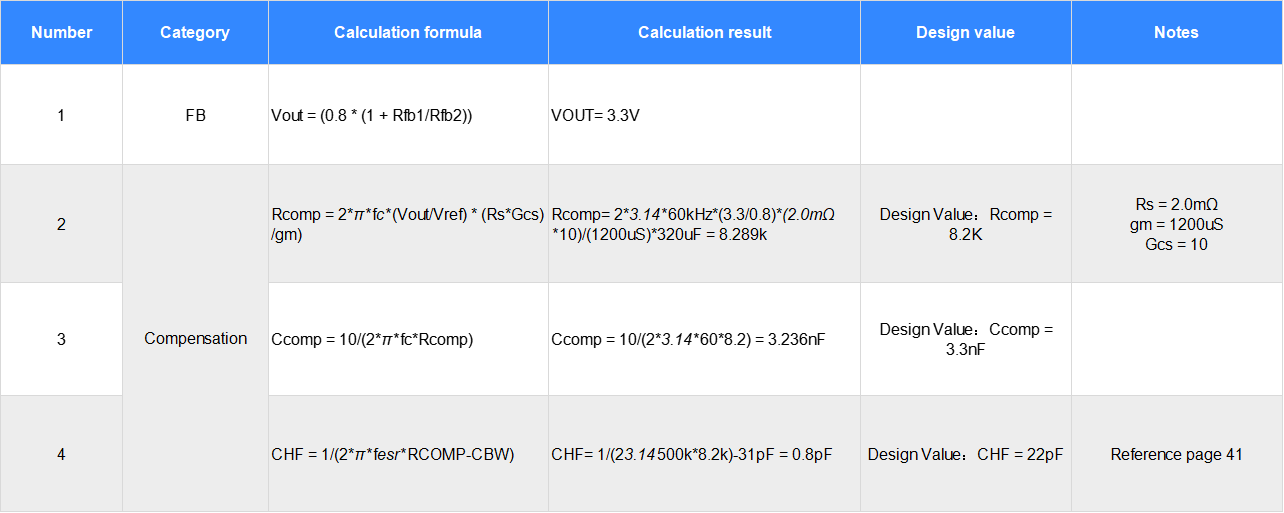
ຕາຕະລາງ 21: ການຄິດໄລ່ FB ແລະ ການຊົດເຊີຍ
4.7 ການຄຳນວນການອອກແບບ EMC ສຳລັບ LM25149
ໂດຍບໍ່ຕ້ອງວິເຄາະຫຼາຍ, ກະລຸນາເບິ່ງຕາມຂໍ້ກຳນົດ.
5- ສະຫຼຸບການອອກແບບ
5.1 ສະຫຼຸບການອອກແບບ ແລະ ການເລືອກພະລັງງານ BUCK ສຳລັບ LM25149
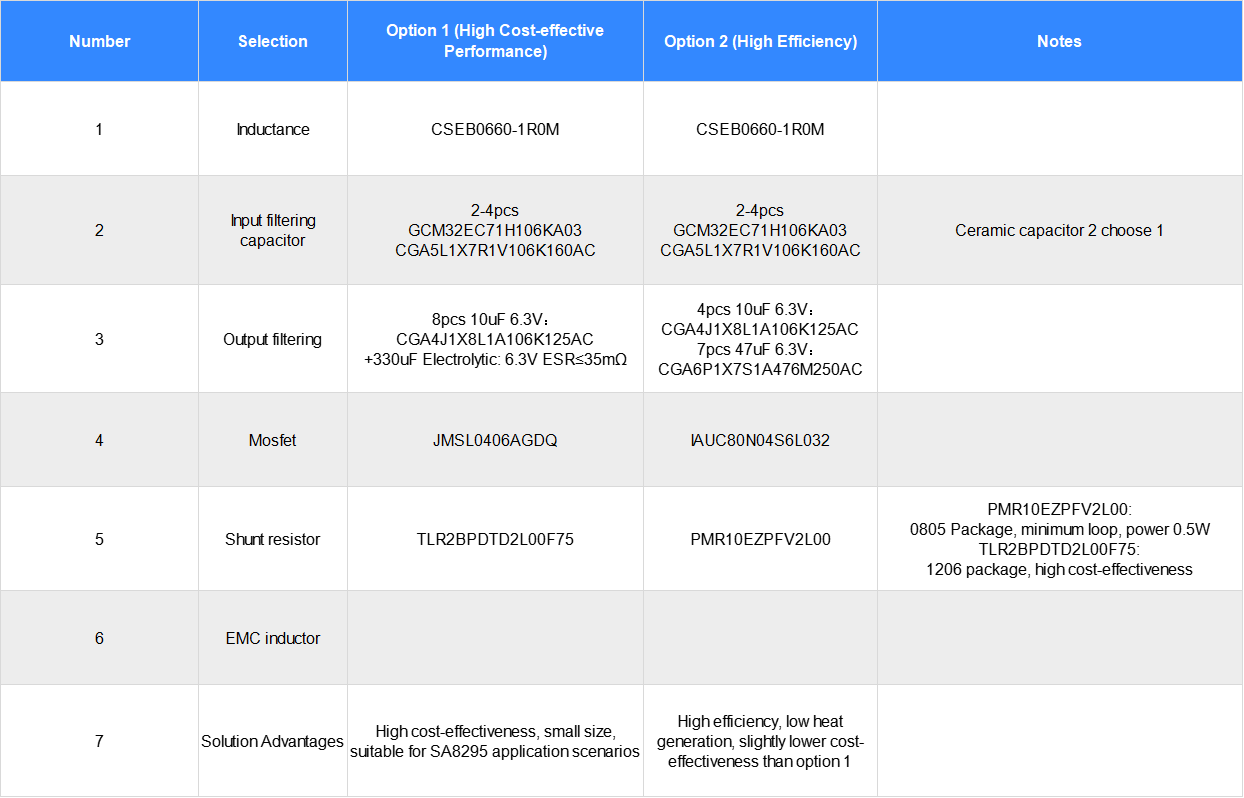
ຕາຕະລາງ 22: ການອອກແບບ ແລະ ການເລືອກ
5.2 ສະຫຼຸບແກ້ໄຂບັນຫາ
ປະສິດທິພາບ ແລະ ຄວາມມີປະສິດທິຜົນຂອງໂປງຈ່າຍໄຟຟ້າແບບສະຫຼັບຊັ້ນສອງຖືກກະທົບຈາກປັດໃຈຫຼາຍຢ່າງ. ປະສິດທິຜົນ ແລະ ຂໍ້ກຳນົດຕ້ອງຄຳນຶງເຖິງປັດໃຈໃນການນຳໃຊ້ຈິງ. ບົດນີ້ຖືກນຳໃຊ້ສຳລັບການຄຳນວນທາງທິດສະດີເພື່ອສະໜອງຄຳແນະນຳທາງທິດສະດີໃນການອອກແບບໃນການນຳໃຊ້ຈິງ. ປະສິດທິຜົນ ແລະ ຂໍ້ກຳນົດຂອງການອອກແບບນັ້ນກ່ຽວຂ້ອງຢ່າງໃກ້ຊິດກັບປະສິດທິຜົນຂອງອຸປະກອນ, ເງື່ອນໄຂການນຳໃຊ້, ການຈັດວາງ, ແລະ ອື່ນໆ, ແລະ ຕ້ອງການການທົດສອບ ແລະ ການຢືນຢັນທີ່ເຂັ້ມງວດ.
ການອອກແບບໂປຼແກຼມສະຫຼັບໄຟຟ້າແບບ Synchronous buck ສຳລັບໂດເມນຄອນໂທລເລີ້ຂອງ Qualcomm ແມ່ນເຂດທີ່ທ້າທາຍໃນການອອກແບບຄອນໂທລເລີ້, ຕ້ອງການຄວາມສົມດຸນລະຫວ່າງປະສິດທິພາບ, ຂະໜາດ ແລະ ຕົ້ນທຶນ. CODACA ໃຫ້ຄວາມສຳຄັນກັບການຄົ້ນຄວ້າ ແລະ ພັດທະນາດ້ວຍຕົນເອງ ແລະ ການອອກແບບຂດລວງໄຟຟ້າ ແລະ ຕົວກັ້ນສຽງຮູບແບບທຳມະດາ. CSEB0660-1R0M ເໝາະສຳລັບການພັດທະນາ ແລະ ການນຳໃຊ້ແຜນງານຂອງ Qualcomm, ມີປະສິດທິພາບດ້ານຕົ້ນທຶນສູງ, ຄວາມຕ້ານທານຕໍ່ກະແສສູງທີ່ແຂງແຮງ, ການຜະລິດຄວາມຮ້ອນຕ່ຳ ແລະ ອັດຕາສ່ວນພະລັງງານຕໍ່ປະລິມາດທີ່ນຳໜ້າອຸດສາຫະກຳ. CODACA ມຸ່ງໝັ້ນກັບການຄົ້ນຄວ້າ, ພັດທະນາ ແລະ ນະວັດຕະກຳດ້ານເຕັກໂນໂລຢີ, ພັດທະນາຜະລິດຕະພັນທີ່ດີເລີດໃຫ້ກັບອຸດສາຫະກຳຂດລວງໄຟຟ້າ ແລະ ສົ່ງເສີມການພັດທະນາ ແລະ ການນຳໃຊ້ຜະລິດຕະພັນໄຟຟ້າ.