
ລິ້ງໄວໆ

ຄວາມຕ້ອງການທີ່ເພີ່ມຂຶ້ນສຳລັບລະບົບອັດຕະໂນມັດໃນອຸດສາຫະກຳການຜະລິດ ແລະ ອຸດສາຫະກຳບໍລິການ ກຳລັງຂັບເຄື່ອນການພັດທະນາຢ່າງວ່ອງໄວຂອງຫຸ່ນຍົນຄົນຮູບ. ດ້ວຍການເພີ່ມຂຶ້ນຂອງອົງປະກອບການເຄື່ອນໄຫວ (DOF) ແລະ ການປັບປຸງຄວາມໄວໃນການຕອບສະໜອງຕໍ່ສິ່ງແວດລ້ອມ, ຫຸ່ນຍົນຄົນຮູບຈຶ່ງກາຍເປັນລະບົບທີ່ຊັບຊ້ອນຫຼາຍຂຶ້ນ, ເຮັດໃຫ້ພວກມັນສາມາດຈຳລອງການເຄື່ອນໄຫວຂອງມະນຸດໄດ້ຢ່າງແທ້ຈິງຫຼາຍຂຶ້ນ. ອົງປະກອບການເຄື່ອນໄຫວທີ່ສູງຂຶ້ນໝາຍຄວາມວ່າ ຫຸ່ນຍົນຄົນຮູບຈະຕ້ອງການມໍເຕີໄຟຟ້າຫຼາຍຂຶ້ນ, ແລະ ຕົວຕ້ານສຽງ (inductors) ມີບົດບາດສຳຄັນໃນລະບົບຄວບຄຸມມໍເຕີ, ການຈັດການພະລັງງານ ແລະ ລະບົບປຸງແຕ່ງສັນຍານຂອງຫຸ່ນຍົນຄົນຮູບ.

1- ການນຳໃຊ້ຕົວຕ້ານສຽງ (inductors) ໃນຫຸ່ນຍົນຄົນຮູບ
ຕົວຕ້ານສຽງ (inductors) ຖືກນຳໃຊ້ເປັນຫຼັກໃນຫຸ່ນຍົນຄົນຮູບ ໃນການຂັບມໍເຕີ, ການຈັດການພະລັງງານ ແລະ ການປຸງແຕ່ງສັນຍານ.
ການຂັບມໍເຕີ: ຫຸ່ນຍົນມະນຸດຮູບຮ່າງລະດັບສູງໃນຕະຫຼາດມັກຈະມີມໍເຕີ້ທີ່ເຊື່ອມຕໍ່ກັນ 40-50 ຕົວ, ເຊິ່ງກຳນົດຄວາມເສລີພາບ ແລະ ຄວາມຍືດຢຸ່ນຂອງຫຸ່ນຍົນ. ລວງລວງໄຟຟ້າຂັບເຄື່ອນມໍເຕີ້ໃຫ້ຫມູນຢ່າງລຽບງ່າຍຜ່ານການເກັບພະລັງງານ ແລະ ສະຫຼາດໄຟຟ້າຢ່າງຕໍ່ເນື່ອງ, ຊ່ວຍໃຫ້ລະບົບຄວບຄຸມມໍເຕີ້ຂອງຫຸ່ນຍົນມະນຸດສາມາດບັນລຸການເຄື່ອນໄຫວຂອງຂໍ້ຕໍ່, ການປັບທ່າທີ ແລະ ຄວາມສົມດຸນແບບໄດ້ນາມິກ. ມໍເຕີ້ຂັບເຄື່ອນ ແລະ ພະລັງງານສູງຕ້ອງການລວງລວງທີ່ມີຄຸນລັກສະນະການໂຕ້ຕອບໄຟຟ້າສູງ ແລະ ຄວາມສາມາດໃນການຖືກໄຟຟ້າສູງເພື່ອຮັບມືກັບການເຄື່ອນໄຫວຂອງໄຟຟ້າທີ່ຜັນຜວນໃນທັນທີ. ໃນຂະນະດຽວກັນ, ມັນຈຳເປັນຕ້ອງຫຼຸດຜ່ອນການສູນເສຍເພື່ອປັບປຸງປະສິດທິພາບຂອງລະບົບ ແລະ ຍືດເວລາໃຊ້ງານຂອງຖ່ານໄຟ.
ການຈັດການພະລັງງານ: ຂດລວດເປັນສ່ວນປະກອບຫຼັກຂອງຕົວປ່ຽນແປງ DC-DC (ເຊັ່ນ ວົງຈອນ buck ແລະ boost) ໃນລະບົບການຈັດການພະລັງງານ, ເຊິ່ງສະໜອງພະລັງງານທີ່ຄົງທີ່ໃນຮູບແບບຄວາມຕ້ອງການໄຟຟ້າທີ່ແຕກຕ່າງກັນໃຫ້ກັບໂປຣເຊັດເຊີ AI, ສັນຍານ, ໂມດູນສື່ສານ ແລະ ອື່ນໆ, ເພື່ອເພີ່ມປະສິດທິພາບໃນການຈັດຈໍາໜ່າຍ ແລະ ປ່ຽນແປງພະລັງງານ. ຕ້ອງການຄວາມຕ້ານທານໄຟຟ້າຕໍ່າ (DCR), ປະສິດທິພາບໃນການປ່ຽນແປງສູງເພື່ອຫຼຸດຜ່ອນການສູນເສຍພະລັງງານ, ຄ່າກະແສໄຟຟ້າສູງ ແລະ ຄວາມໝັ້ນຄົງທາງດ້ານອຸນຫະພູມທີ່ດີ.
ການປະມວນຜົນສັນຍານ: ໃນລະບົບການປຸງແຕ່ງສັນຍານ, ຂດລວດຖືກນໍາໃຊ້ເພື່ອກັ້ນສຽງຮົບກວນຄວາມຖີ່ສູງ ແລະ EMI, ເພື່ອຮັບປະກັນຄວາມບໍລິສຸດຂອງສັນຍານ. ຕົວຢ່າງ, ໃນລະບົບການຮັບຮູ້, ມັນຊ່ວຍໃຫ້ເກີດການຮັບຮູ້ ແລະ ການຕອບສະໜອງກັບສະພາບແວດລ້ອມພາຍນອກຂອງຫຸ່ນຍົນຄົນຮູບ. ໃນລະບົບການສື່ສານ ແລະ ການຄວບຄຸມ, ຂດລວດນໍາໃຊ້ການອອກແບບ EMI ເພື່ອຮັບປະກັນຄວາມສາມາດຕ້ານການຮົບກວນຂອງເຄື່ອງ radar, ເຄື່ອງຖ່າຍຮູບ, ການສື່ສານບໍ່ມີສາຍ ແລະ ໂມດູນອື່ນໆ, ແລະ ຍົກສູງຄວາມໝັ້ນຄົງໃນການດໍາເນີນງານຂອງອຸປະກອນ.
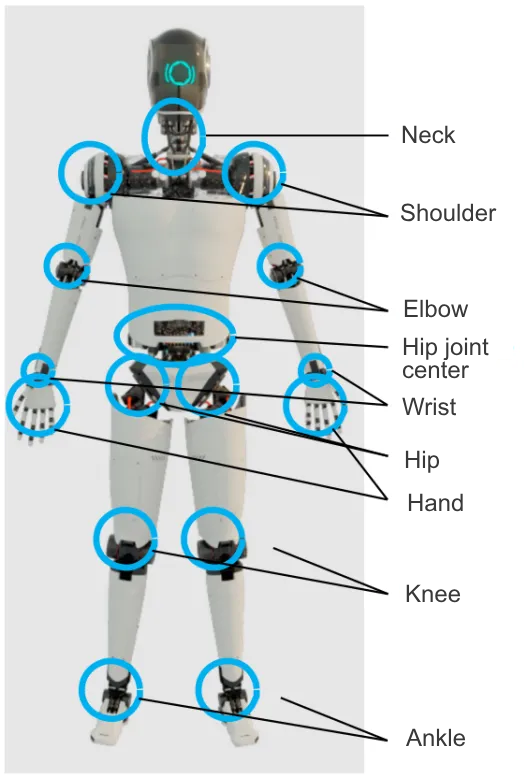
ຮູບທີ 1: ຕຳແໜ່ງຫຼັກຂອງມໍເຕີຮ່ວມກັນຂອງຫຸ່ນຍົນຄົນ (ຮູບຈາກ TI)
2- ຄວາມຕ້ອງການຂອງຂດລວດສຳລັບຫຸ່ນຍົນຄົນ
ລະບົບໄຟຟ້າຂອງຫຸ່ນຍົນຄົນມີຄວາມຊັບຊ້ອນ, ແລະເພື່ອໃຫ້ບັນລຸການຄວບຄຸມການເຄື່ອນໄຫວຢ່າງແນ່ນອນ ແລະ ການສື່ສານທີ່ເຊື່ອຖືໄດ້, ມັນຈະຕ້ອງອີງໃສ່ສ່ວນປະກອບພື້ນຖານເຊັ່ນ: ຂດລວດ. ລັກສະນະດ້ານເຕັກນິກຂອງຫຸ່ນຍົນຄົນຍັງກຳນົດຄວາມຕ້ອງການສູງຂອງມັນຕໍ່ຜະລິດຕະພັນຂດລວດໃນດ້ານການປະຕິບັດງານ ແລະ ການອອກແບບໂຄງສ້າງ. ຄວາມຕ້ອງການຫຼັກໆມີດັ່ງນີ້:
2.1 ການຫຼຸດຂະໜາດ ແລະ ຄວາມໜາແໜ້ນຂອງພະລັງງານສູງ
ພື້ນເຂົ້າຂອງຫຸ່ນຍົນຮູບຄົນມີຄວາມແອອັດຫຼາຍ, ເຊິ່ງບັນຈຸມໍເຕີ້, ໜ່ວຍຄຳນວນ (CPU/GPU), ເຊັນເຊີ້, ແລະອື່ນອື່ນຈຳນວນຫຼາຍ, ແລະແຜງວົງຈອນໄຟຟ້າ (ເຊັ່ນ: POL, ຕົວປ່ຽນແປງຈຸດບັນຈຸກ) ຕ້ອງຖືກຫຍໍ້ເຂົ້າເພື່ນ. ຕ້ອງການຂດລວດທີ່ມີຂະໜາດນ້ອຍແລະເບົາເພື່ນຟິດເຂົ້າກັບການອອກແບບໂຄງສ້າງທີ່ແອອັດ, ໃນຂະນະທີ່ກໍ່ຕ້ອງມີຄວາມໜາແໜ້ນຂອງພະລັງສູງເພື່ນໃຫ້ສາມາດຈັດການພະລັງສູງໃນພື້ນທີ່ນ້ອຍ. ຂດລວດທີ່ມີການກໍ່ສ້າງແບບຂຶງຫຼືມີເຄື່ອງກັ້ນສາມາດຮັບທົນຕໍ່ກະແສສົມບູນ ແລະ ກະແສຄວາມຮ້ອນທີ່ໃຫຍ່ຫຼາຍໃນຂະໜາດທີ່ນ້ອຍ,´ຊຶ່ງເປັນສິ່ງສຳຄັນໃນການບັນລະສຳເລັດພະລັງອັນສູງໃນພື້ນທີ່ຈຳກັດ.
2.2 ມີປະສິດທິພາບການຕ້ານກະທົບສູງຈາກສາຍໄຟຟ້າແມ່ເຫຼັກ
ສະພາບແວດລ້ອມໄຟຟ້າເທິງພາຍໃນຂອງຫຸ່ນຍົນມີຄວາມຊັບຊ້ອນ, ມີວົງຈອນດິຈິຕອນຄວາມໄວສູງ, ສຽງຮົບກວນຈາກການປ່ຽນແປງຢ່າງຮຸນແຮງຂອງໂມເຕີໄດຮ໌, ແລະ ເຊັນເຊີທີ່ອ່ອນໄຫວ (ເຊັ່ນ: IMUs ແລະ ໂຄມຖ່າຍຮູບ). ການໃຊ້ຂດລວດທີ່ບໍ່ມີການປົກປ້ອງຈະຜະລິດສາຍເຄື່ອນໄຟຟ້າທີ່ແຂງແຮງ ແລະ ກາຍເປັນແຫຼ່ງຂອງສຽງຮົບກວນໄຟຟ້າ, ເຊິ່ງຈະມີຜົນກະທົບຢ່າງຮ້າຍແຮງຕໍ່ຄວາມໝັ້ນຄົງຂອງການອ່ານຂໍ້ມູນຈາກເຊັນເຊີ ແລະ ລະບົບຄວບຄຸມ. ຂດລວດທີ່ມີການປົກປ້ອງຈະມີການຮົ່ວໄຫຼຂອງສາຍເຄື່ອນໄຟຟ້າໜ້ອຍທີ່ສຸດ, ຊ່ວຍຫຼຸດຜ່ອນສຽງຮົບກວນໄຟຟ້າຢ່າງມີປະສິດທິຜົນ ແລະ ຮັບປະກັນການດຳເນີນງານຢ່າງໜ້າເຊື່ອຖືຂອງອົງປະກອບອື່ນໆໃນລະບົບ. ດັ່ງນັ້ນ, ຂດລວດແບບຂຶ້ນຮູບ, ຂດລວດພະລັງງານທີ່ມີກະແສໄຟຟ້າສູງ ແລະ ຂດລວດພະລັງງານອື່ນໆທີ່ມີໂຄງສ້າງປົກປ້ອງດ້ວຍສາຍເຄື່ອນໄຟຟ້າຈຶ່ງເປັນທາງເລືອກທີ່ເໝາະສົມກວ່າ.
2.3 ກະແສໄຟຟ້າສູງສຸດ
ພະລັງໄຟຟ້າຂອງຫຸ່ນຍົນປ່ຽນແປງຢ່າງຮຸນນະລົງ ເຊັ່ນ: ເມື່ອເລີ່ມເດີນສະຫຼາຍ, ວິ່ງ, ຫຼືຍົກວັດຖຸໜັກ, ໄຟຟ້າຂອງເຄື່ອງຈັກ ແລະ ຫົວໜ່ວຍຄຳນວນຈະເພີ່ນຂຶ້ນທັນທີ. ອິນດັກເຕີ້ມຕ້ອງສາມາດຫຼີກເວັ້ນການອົມພຶ້ນຂອງແມກເນຕິກໃນໄລຍະທີ່ໄຟຟ້າສູງ (ນັ້ນແມ່ນ, ຄ່າອິນດັກເຕີ້ມບໍ່ຫຼຸດຢ່າງຮຸນນະລົງ), ຖ້າບໍ່ດັ່ງນັ້ນວົງຈອນພະລັງໄຟຟ້າຈະບໍ່ຄວບຄຸມ, ເຮັດໃຫ້ຄ່າໄຟຟ້າລະບົບລົ້ມລະລາຍ ແລະ ຕ້ອງຮີເລີ່ມ. ສະນັ້ນ, ອິນດັກເຕີ້ມຕ້ອງມີຄຸນສົມບັດ "ການອົມພຶ້ນແບບນຸ້ມ", ນັ້ນແມ່ນ, ເມື່ອເຂົ້າໃກ້ໄລຍະອົມພຶ້ນ, ຄ່າອິນດັກເຕີ້ມຫຼຸດຢ່າງຊ້າ, ແທນທີ່ຫຼຸດຢ່າງຮຸນນະລົງ. ສິ່ງນີ້ໃຫ້ເປັນຕົວກັນສະຫຼິບສຳລັບລະບົບຄວບຄຸມພະລັງໄຟຟ້າ ແລະ ພັດທະນາຄວາມເຊື່ອງາມຂອງລະບົບ.
2.4 ມີຄວາມຕ້ານກະທົບ ແລະ ການສັ່ນທີ່ແຂງແຮງ
ຫຸ່ນຍົນຄົນຮູບພົບເຄື່ອນໄຫວຢູ່ເລື້ອຍໆ, ມີການສັ່ນສະເທືອນທາງເຄື່ອງຈັກຫຼາຍ, ແລະ ອິນດັກເຕີ້ຈຳເປັນຕ້ອງມີຄວາມຕ້ານທານຕໍ່ການສັ່ນສະເທືອນ ແລະ ການກະທົບ, ຕຳເຂັ້ຽຂອງມັນຄວນຈະແໜ້ນໜາ, ແລະ ໂຕເຄື່ອງປ້ອງກັນ ແລະ ໂຄ້ຍພາຍໃນສາມາດຮັບມືກັບຄວາມເຄັ່ງຕຶງທາງເຄື່ອງຈັກໄດ້. ອິນດັກເຕີ້ຂອງໂຄງສ້າງແບບຂຶ້ນຮູບນັ້ນ ຈະຊ່ວຍໃຫ້ໂຄ້ຍຖືກແຂງຕົວຢ່າງສົມບູນພາຍໃນວັດສະດຸເມັກເນຕິກ, ເຊິ່ງມີຄວາມເຂັ້ມແຂງທາງເຄື່ອງຈັກສູງຫຼາຍ ແລະ ມີຄວາມຕ້ານທານຕໍ່ການກະທົບທີ່ແຂງແຮງ, ສະນັ້ນຈຶ່ງຖືກນຳໃຊ້ຢ່າງກວ້າງຂວາງໃນລະບົບຫຸ່ນຍົນຄົນຮູບ.
2.5 ປັບຕົວເຂົ້າກັບສະພາບແວດລ້ອມຄວາມຖີ່ສູງ ແລະ ອຸນຫະພູມສູງ
ອິນດັກເຕີ້ຈຳເປັນຕ້ອງມີຄຸນລັກສະນະຄວາມຖີ່ສູງທີ່ດີ, ເຊິ່ງສາມາດປ້ອງກັນການລົບກວນຄວາມຖີ່ສູງໄດ້ຢ່າງມີປະສິດທິຜົນ, ຫຼຸດຜ່ອນຄື້ນຜິດປົກກະຕິ ແລະ ການກ້ອງ, ແລະ ຮັກສາການສູນເສຍພະລັງງານໃຫ້ຕ່ຳໃນຄວາມຖີ່ສູງເພື່ອປັບປຸງປະສິດທິພາບໃນການປ່ຽນແປງ.
ນອກຈາກນັ້ນ, ຕົວເຄື່ອງຊັກລ້າງຄວນສາມາດຮັກສາຄ່າຄວາມຕ້ານທານໄດ້ຢ່າງໝັ້ນຄົງໃນສະພາບແວດລ້ອມທີ່ມີອຸນຫະພູມສູງ, ຄ່າ Q ຫຼຸດລົງໜ້ອຍ, ແລະ ບໍ່ງ່າຍທີ່ຈະເສື່ອມສະພາບ, ເພື່ອໃຫ້ແນ່ໃຈວ່າປະສິດທິພາບຂອງຕົວເຄື່ອງຊັກລ້າງໃນໂຣບົດນັ້ນໜ້າເຊື່ອຖືໄດ້ໃນການເຮັດວຽກໄລຍະຍາວ.
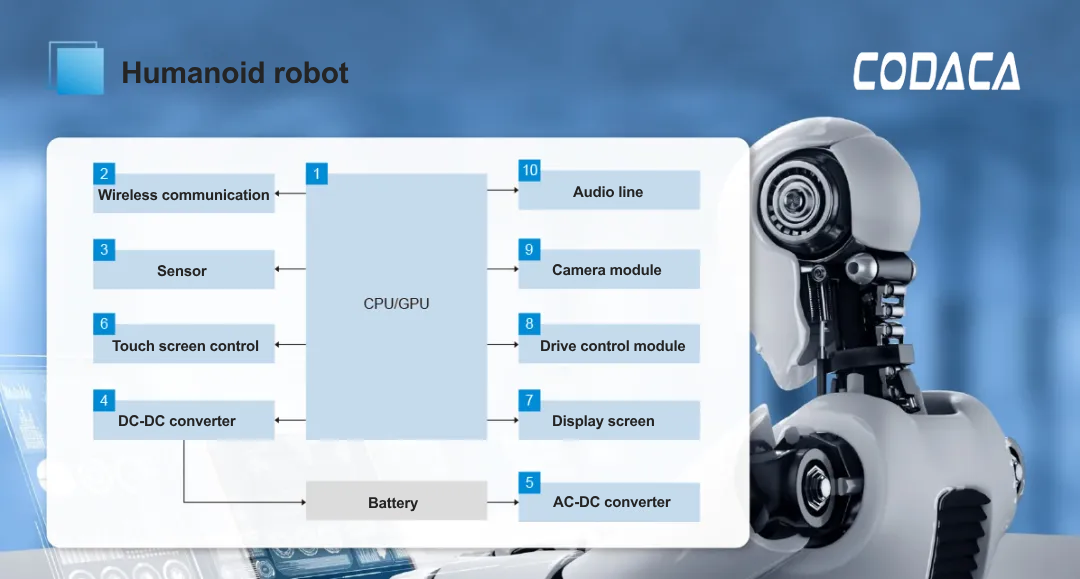
ຮູບ.2 ການນຳໃຊ້ຕົວເຄື່ອງຊັກລ້າງໃນໂຣບົດຮູບຄົນ
3- ໂຄດາກາ ວິທີແກ້ໄຂຕົວເຄື່ອງຊັກລ້າງສຳລັບໂຣບົດຮູບຄົນ
ໃນການນຳໃຊ້ຕ່າງໆ ເຊັ່ນ: ໂຣບົດຮູບຄົນ, ທີ່ປະສົມປະສານກັນລະຫວ່າງຄວາມໜາແໜ້ນຂອງພະລັງງານສູງ, ປະສິດທິພາບສູງ, ຄວາມໜ້າເຊື່ອຖືໄດ້ສູງ, ສະພາບແວດລ້ອມ EMI ທີ່ສັບຊ້ອນ, ແລະ ສະພາບເຄື່ອງຈັກທີ່ຮຸນແຮງ, ຕົວເຄື່ອງຊັກລ້າງທີ່ມີກ້ອງກັ້ນ, ມີຫຼາຍໂລຫະ, ແລະ ມີກ້ອງກັ້ນໄຟຟ້າສູງ ໄດ້ກາຍເປັນທາງເລືອກຫຼັກທີ່ບໍ່ມີໃຜປະຕິເສດໃນວົງຈອນໄຟຟ້າ, ໂດຍສະເພາະໃນໂມດູນໄຟຟ້າ POL ສຳລັບໜ່ວຍຄຳນວນຫຼັກ ແລະ ມໍເຕີຂັບເຄື່ອນຂໍ້ຕໍ່, ເນື່ອງຈາກຂໍ້ດີດ້ານປະສິດທິພາບທີ່ສົມບູรณ໌. ການອອກແບບຂອງມັນສາມາດຖ່ວງດຸນໄດ້ຢ່າງແທ້ຈິງລະຫວ່າງສາມຄວາມທ້າທາຍຫຼັກ: ປະສິດທິພາບ, ຂະໜາດ ແລະ ຄວາມໜ້າເຊື່ອຖືໄດ້.
ຜ່ານການຄົ້ນຄວ້າແລະພັດທະນາດ້ວຍຕົນເອງ ແລະ ນະວັດຕະກໍາດ້ານເຕັກໂນໂລຊີ, Codaca ສະເໜີວິທີແກ້ໄຂດ້ານອິນດັກເຕີ້ທີ່ສາມາດປັບຕົວໄດ້ສໍາລັບຫຸ່ນຍົນຮູບຮ່າງຄົນ, ໂດຍບໍລິສັດໄດ້ເປີດຕົວຜະລິດຕະພັນຫຼາຍປະເພດ ແລະ ຮຸ້ນ ເຊັ່ນ: ອິນດັກເຕີ້ກໍາລັງໄຟຟ້າກະແສໄຟຟ້າສູງທີ່ມີໂຄງສ້າງກັ່ນກະຈາຍແມ່ເຫຼັກ, ອິນດັກເຕີ້ແບບບູຮານທີ່ບາງ ແລະ ເບົາ, ແລະ ຕົວກັ່ນກະຈາຍແບບຄູ່. ຜະລິດຕະພັນເຫຼົ່ານີ້ສາມາດສະເໜີລັກສະນະດ້ານໄຟຟ້າທີ່ແຕກຕ່າງກັນ ເພື່ອຕອບສະໜອງຄວາມຕ້ອງການດ້ານປະສິດທິພາບສູງຂອງອິນດັກເຕີ້ໃນສະຖານະການຕ່າງໆຂອງຫຸ່ນຍົນຮູບຮ່າງຄົນ, ແລະ ຖືກນໍາໃຊ້ຢ່າງກວ້າງຂວາງໃນມົດຸນການສື່ສານ ແລະ ການນໍາທາງຂອງຫຸ່ນຍົນ, ມົດຸນກໍາລັງໄຟຟ້າ, ມົດຸນຂັບເຄື່ອນມໍເຕີ, ແຜງຄວບຄຸມຫຸ່ນຍົນ ແລະ ມົດຸນອື່ນໆ.
3.1 ອິນດັກເຕີ້ກໍາລັງໄຟຟ້າກະແສໄຟຟ້າສູງແບບກະທັດຮັດ
ເຄື່ອງດັນໄຟຟ້າທີ່ມີພະລັງງານສູງແບບຄົມກຽວ ຖົດໄດ້ຖົງໃຊ້ໃນມົດູນ DC-DC ໃນລະບົບຂັບເຄື່ອນດ້ວຍມໍໂທຣ໌ ແລະ ລະບົບຈັດການພະລັງໄຟຟ້າຂອງຫຸ່ນຍົນມະນຸດ. ລວງລວງໄຟຟ້າສູງໃຊ້ວັດສະດຸຫຼອກເຫຼັກແມ້ທີ່ Codaca ພັດທະນາຢ່າງເອກະລາດ´ຊຶ່ງມີລັກສະນະຄື: ຄວາມໄຟຟ້າສູງ, ການສູນເສຍຕ່ຳ, ປະສິດທິພາບການແປງພະລັງສູງ, ແລະ ອຸນຫະພູມການເຮັດວຽກສູງ ເພື່ອຮັບປະກັນປະສິດທິພາບ ແລະ ຄວາມທົນຂອງຫຸ່ນຍົນມະນຸດ. ລວງລວງໄຟຟ້າສູງສາມາດເຂົ້າເຖິງ 422A ແລະ ອຸນຫະພູມການເຮັດວຽກສາມາດເຂົ້າເຖິງ 170°C. ພ້ອມທັງ, ຜະລິດຕະພັນນີ້ໃຊ້ໂຄງສ້າງການກັ້ນແມ່ເຫຼັກ, ຊຶ່ງມີປະສິດທິພາບການຕ້ານກະທົບໄຟຟ້າແມ່ເຫຼັກທີ່ແຂງແຮງ. ມັນພ້ອມກັບຄວາມຕ້ອງການຂອງຫຸ່ນຍົນມະນຸດສຳລັບຄວາມໄຟຟ້າສູງ, ອຸນຫະພູມການເຮັດວຽກສູງ ແລະ ກະທົບໄຟຟ້າແມ່ເຫຼັກຕ່ຳ.
ຮຸ່ນທີ່ແນະນຳ: CSBX , CSBA , CSCM , CSUT , CSCIL , ອື່ນໆ.

3.2 ລວງລວງແບ່ງທີ່ບາງ ແລະ ເບົາ
ຕົວເກັບປະຈຸແບບຂຶ້ນຮູບ ຖືກນໍາໃຊ້ເປັນຫຼັກໃນມໍດູນສະແດງຜົນຮູບຄົນ, ມໍດູນຄວບຄຸມໜ້າຈໍສໍາຜັດ, ມໍດູນ DC-DC ແລະ ອື່ນໆ. ຕົວຂົດລວດພະລັງງານທີ່ຂຶ້ນຮູບແບບນີ້ນໍາໃຊ້ຜົງໂລຫະອັນຊິດທີ່ມີການສູນເສຍຕໍ່າ ເຊິ່ງພັດທະນາຂຶ້ນເອງໂດຍ CODACA, ມີຄວາມສູນເສຍຕໍ່າ, ປະສິດທິພາບສູງ, ຄວາມຖີ່ການນໍາໃຊ້ກວ້າງຂວາງ ແລະ ສາມາດຫຼຸດສຽງລົບກັບລະດັບຕໍ່າຫຼາຍ. ມັນນໍາໃຊ້ການອອກແບບທີ່ບາງ ແລະ ເບົາ (ຂະໜາດນ້ອຍສຸດ 2mm), ຊ່ວຍປະຢັດພື້ນທີ່ PCB, ເໝາະສຳລັບການຕິດຕັ້ງທີ່ມີຄວາມໜາແໜ້ນສູງ, ແລະ ມີຄວາມຕ້ານທານທາງກົນຈັກຕໍ່ການກະທົບ ແລະ ການສັ່ນສະເທືອນໄດ້ດີ (ຄວາມຕ້ານທານຕໍ່ການສັ່ນສະເທືອນຫຼາຍກວ່າ 10G), ຊ່ວຍຕອບສະໜອງຄວາມຕ້ອງການຂອງຫຸ່ນຍົນຮູບຄົນໃນດ້ານຄວາມໜາແໜ້ນຂອງພະລັງງານສູງ ແລະ ຄວາມໝັ້ນຄົງສູງ.
ຮຸ່ນທີ່ແນະນຳ: CSAG , CSAC , CSAB , CSEB , CSHB , ອື່ນໆ.
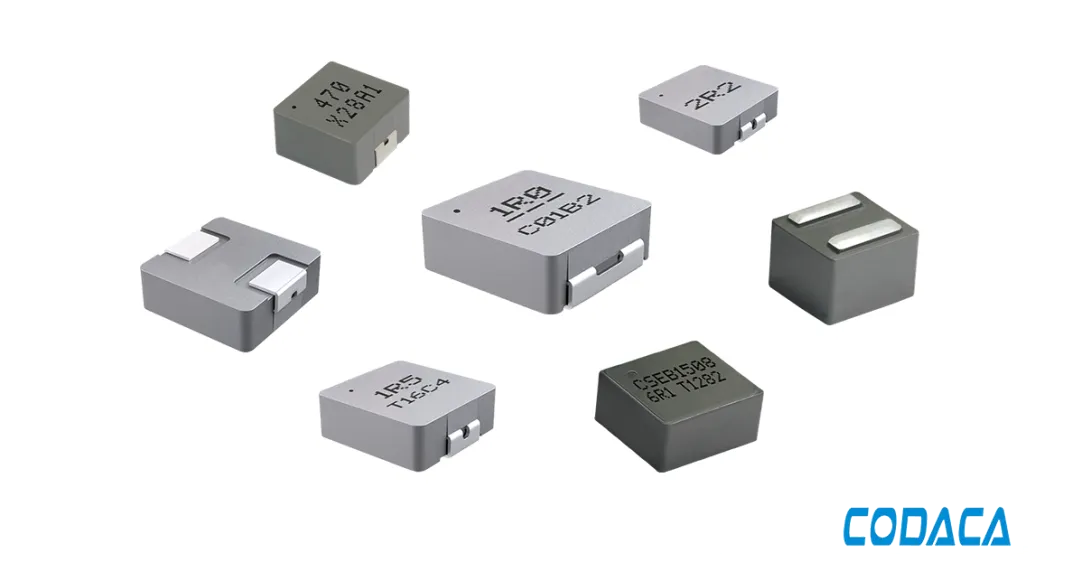
3.3 ຕົວຂົດລວດພະລັງງານ SMD
ຕົວຂົດລວດພະລັງງານ SMD ຂອງ Codaca ຖືກນໍາໃຊ້ເປັນຫຼັກໃນມໍດູນກ້ອງຖ່າຍຮູບ, ມໍດູນສຽງ, ມໍດູນ DC-DC ແລະ ອື່ນໆ, ເຊິ່ງສາມາດຕອບສະໜອງຄວາມຕ້ອງການດ້ານຂະໜາດຕົວຂົດລວດນ້ອຍ, ປະຈຸບັນໃຫຍ່, ປະສິດທິພາບການປ່ຽນແປງສູງ ແລະ ອື່ນໆ.
ຮຸ່ນທີ່ແນະນຳ: SPRHS , CSUS , CRHSM , VCRHS , SPQ , ອື່ນໆ.

ໃນຖານະທີ່ເປັນຜູ້ສະໜອງຊັ້ນນຳໃນດ້ານເຕັກໂນໂລຊີສ່ວນປະກອບແມ່ເຫຼັກ, Codaca Electronics ໄດ້ມຸ່ງໝັ້ນພັດທະນາຂດລວງມາເປັນເວລາ 24 ປີ, ໂດຍວິສະວະກອນສາມາດເລືອກຄ່າຂດລວງ, ປັດຈຸບັນທີ່ໃຫ້ໄວ້, ໂລກັດສັນຍານ, ຂະໜາດຜະລິດຕະພັນ ແລະ ອື່ນໆ ຕາມຄວາມຕ້ອງການດ້ານການປະຕິບັດງານຂອງແຕ່ລະ subsystem ຂອງຫຸ່ນຍົນມະນຸດ. ກະລຸນາຕິດຕໍ່ພະນັກງານຂາຍຂອງ Codaca ເພື່ອຂໍຂໍ້ມູນເພີ່ມເຕີມ.