

หนึ่งในรูปแบบที่พบบ่อยที่สุดขององค์ประกอบแม่เหล็กคืออินดักแตนซ์ (Inductance) ซึ่งมีค่าอินดักแตนซ์เฉพาะตัว และด้วยเหตุนี้ อิมพีแดนซ์จึงเพิ่มขึ้นเมื่อความถี่เพิ่มมากขึ้น การใช้งานเช่นนี้สามารถถือเป็นตัวกรองความถี่สูงระดับแรก (First-order high-frequency filter) ได้ เมื่อวัตถุที่เราต้องการกรองเปลี่ยนจากเส้นทางกระแสไฟฟ้าเดียว (ลูปหรือวงจร) เป็นสองเส้นทางหรือมากกว่านี้ เรามีความจำเป็นต้องวางอินดักเตอร์อย่างน้อยหนึ่งตัวบนแต่ละเส้นทาง เพื่อให้ได้ผลการกรองความถี่สูงเหมือนกัน ซึ่งสามารถออกแบบได้ง่ายและชาญฉลาดในองค์ประกอบแม่เหล็กที่ใช้งานจริง โดยสิ่งที่เรากำลังกล่าวถึงอยู่นี้ก็คือ Common Mode Choke ทำไมนั้นหรือ? เพราะเมื่อมีหลายเส้นทาง (เช่นกรณีที่พบบ่อยที่สุดคือสองเส้นทาง) ฟลักซ์แม่เหล็กที่เกิดจากกระแสไฟฟ้าที่ไหลในทิศทางเดียวกันสามารถถูกแบ่งปันไปยังอีกเส้นทางหนึ่งได้ ทำให้เทียบเสมือนได้รับอิมพีแดนซ์เพิ่มเติม หรือที่เรียกกันว่าการเหนี่ยวนำทางแม่เหล็ก (Magnetic Coupling) ดังนั้น โดยการพันคอยล์สองชุดที่มีปฏิสัมพันธ์เหนี่ยวนำระหว่างกันรอบแกนแม่เหล็ก เราจะสามารถบรรลุประสิทธิภาพในการกรองสัญญาณที่ดีกว่าการใช้อินดักเตอร์แยกต่างหากสองตัว
ข้างต้นได้กล่าวถึงคุณสมบัติการทำงานพื้นฐานของอินดักเตอร์โหมดร่วมที่พบทั่วไป ซึ่งก็คือการกรองสัญญาณรบกวน ดังนั้น สิ่งแรกที่จำเป็นคือการแยกแยะระหว่างหม้อแปลงไฟฟ้ากับอินดักเตอร์โหมดร่วมที่ยังต้องการการทำงานแบบเหนี่ยวนำ เนื่องจากการกรองจะช่วยกดหรือดูดซับเสียงรบกวนบนสายไฟ จากทิศทางของการเหนี่ยวนำ (excitation) จะเป็นลักษณะโหมดร่วม (common mode) แต่หม้อแปลงไฟฟ้านั้นจะส่งกระแสไฟฟ้าที่แสดงถึงพลังงาน ซึ่งเป็นลักษณะโหมดต่าง (differential mode) ดังนั้น ในลักษณะเดียวกันกับการต่อคาปาซิเตอร์เพื่อความปลอดภัย อินดักเตอร์โหมดร่วมจำเป็นต้องใช้การต่อแบบ Y (ผ่านวงจรกราวด์หรือวงจรกราวด์อ้างอิง) ในขณะที่หม้อแปลงไฟฟ้าจะต้องใช้การต่อแบบ X (เชื่อมระหว่างวงจรขาเข้าและวงจรขาออก) ประการที่สอง การประเมินผลและการวัดผลของประสิทธิภาพในการกรองโหมดร่วมเองนั้น มักจำเป็นต้องอาศัยวงจรส่วนเสริมในการช่วยทดสอบ อย่างไรก็ตามในการทดสอบ EMC (Electromagnetic Compatibility) จริง ๆ มักจะทำการทดสอบเฉพาะสัญญาณที่เกิดจากปฏิสัมพันธ์ระหว่างโหมดต่างและโหมดร่วมที่ป้อนเข้ามายังเครื่องรับ (LISN - Linear Impedance Stabilization Network) เพื่อตรวจสอบว่าตรงตามมาตรฐานระเบียบข้อกำหนดที่เกี่ยวข้องหรือไม่ (เช่น การรับรอง CE) ดังนั้น บทบาทของอินดักเตอร์โหมดร่วมจึงมักไม่สามารถหาคำตอบได้จากหนังสือสเปค ซึ่งเป็นเหตุผลหลักที่วิศวกรมักพึ่งพาประสบการณ์ในการทำนายแบบจำลองเมื่อเลือกใช้งาน สุดท้ายนี้ ผู้อ่านที่สังเกตละเอียดอาจพบว่าอินดักเตอร์โหมดร่วมนั้นเรียกว่าอินดักเตอร์ แต่แท้จริงแล้วไม่แตกต่างจากอินดักเตอร์กำลังไฟฟ้า โดยไม่คำนึงถึงค่ากระแสอิ่มตัวหรือการเก็บพลังงาน และชื่อภาษาอังกฤษของมันมักลงท้ายด้วยคำว่า choke ดังนั้น ความหมายพื้นฐานของมันยังคงหมายถึง choke อยู่ ดังที่เราจะพูดถึงในภายหลัง ซึ่งก็คือผลกระทบจากการต้านทาน (choke effect) ที่ช่วยให้มันสามารถทำงานด้านการกรองได้ ดังนั้นการเรียกมันว่าอินดักเตอร์โหมดร่วมแบบ choke จึงสอดคล้องกับหลักการของมันมากกว่า
ในส่วนต่อไปนี้ เราจะได้เรียนรู้เกี่ยวกับหลักการพื้นฐานด้านโครงสร้าง ประเภทการใช้งาน และการเลือกแบบ common mode inductors โดยหวังว่าจะเป็นประโยชน์ต่อคุณในฐานะวิศวกร นอกจากนี้ หากคุณมีคำถามใด ๆ หรือต้องการอภิปรายเกี่ยวกับเนื้อหาที่เกี่ยวข้อง กรุณาติดต่อเรา ทีมวิศวกรของเราจะให้ความช่วยเหลือแก่คุณอย่างเต็มที่เท่าที่สามารถทำได้ จากมุมมองขององค์ประกอบและการประยุกต์ใช้งาน
1- การเหนี่ยวนำด้วยสนามแม่เหล็ก
ดังแสดงในรูปที่ 1 ขดลวด A ที่มีกระแสไฟฟ้าไหลผ่านจะกระจายสนามแม่เหล็กในพื้นที่ใกล้เคียงวงจรไฟฟ้าของมันเอง (ในที่นี้คือขดลวด) ซึ่งแสดงโดยฟลักซ์แม่เหล็ก Фa (หรือ→Ba) สำหรับความหนาแน่นฟลักซ์แม่เหล็กในการจัดประเภทการใช้งานและการเลือก common mode inductance) ความเข้มของสนามแม่เหล็กขึ้นอยู่กับขนาดของกระแสไฟฟ้า จำนวนรอบของขดลวด พื้นที่หน้าตัดที่มีประสิทธิภาพ และว่ามีแกนแม่เหล็กหรือไม่ ฟลักซ์แม่เหล็กที่จุดศูนย์กลางของขดลวดสามารถประมาณค่าได้จากสมการดังนี้:

ในจำนวนนี้ หากมีแกนแม่เหล็กอยู่ตรงกลางขดลวด ค่าการนำแม่เหล็กของมันจะ  ยิ่งมากเท่าไร ความยาวของวงจรแม่เหล็กสมมูลที่เกี่ยวข้องกันก็จะ
ยิ่งมากเท่าไร ความยาวของวงจรแม่เหล็กสมมูลที่เกี่ยวข้องกันก็จะ  ยิ่งสั้นลง และฟลักซ์แม่เหล็กก็จะมากขึ้นตามไปด้วย เป็นโครงสร้างอินดักแตงซ์มาตรฐานและรูปแบบการกระจายฟลักซ์แม่เหล็กในพื้นที่ที่เกี่ยวข้องกัน ควรสังเกตว่า การกระจายฟลักซ์แม่เหล็กของมันไม่ได้ขึ้นอยู่กับการเปลี่ยนแปลงของกระแสไฟฟ้า และเป็นความสัมพันธ์เชิงเอกลักษณ์ โดยสาระสำคัญของมันเกิดจากกฎสนามแม่เหล็กของเกาส์ในสมการแมกซ์เวลล์ทางแม่เหล็กไฟฟ้า
ยิ่งสั้นลง และฟลักซ์แม่เหล็กก็จะมากขึ้นตามไปด้วย เป็นโครงสร้างอินดักแตงซ์มาตรฐานและรูปแบบการกระจายฟลักซ์แม่เหล็กในพื้นที่ที่เกี่ยวข้องกัน ควรสังเกตว่า การกระจายฟลักซ์แม่เหล็กของมันไม่ได้ขึ้นอยู่กับการเปลี่ยนแปลงของกระแสไฟฟ้า และเป็นความสัมพันธ์เชิงเอกลักษณ์ โดยสาระสำคัญของมันเกิดจากกฎสนามแม่เหล็กของเกาส์ในสมการแมกซ์เวลล์ทางแม่เหล็กไฟฟ้า
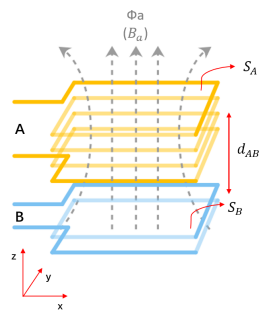
รูปที่ 1 การกระจายสนามแม่เหล็กในพื้นที่ของขดลวด A และ B ที่มีกระแสไฟฟ้าไหลผ่าน
เมื่อคอยล์ B อีกตัวหนึ่งในอากาศเข้ามาใกล้คอยล์ A ที่มีกระแสไฟฟ้าไหลผ่านในความสัมพันธ์ของตำแหน่งบางอย่าง (ดังแสดงในรูปที่ 1) ฟลักซ์แม่เหล็กบางส่วนที่กระจายออกมาจากคอยล์ A จะต้องผ่านทะลุคอยล์ B เข้าไป ทำให้เกิดความสัมพันธ์แบบมีฟลักซ์ร่วมกัน ตามกฎของแอมแปร์ เมื่อฟลักซ์แม่เหล็กภายในวงจรที่ถูกล้อมรอบโดยคอยล์ B มีการเปลี่ยนแปลง จะเกิดแรงเคลื่อนไฟฟ้าเหนี่ยวนำ หรือแรงดันไฟฟ้าเหนี่ยวนำ ในวงจรของคอยล์ B สามารถคาดเดาได้ว่า หากคอยล์ B เป็นคอยล์ตัวนำที่เปิดวงจร ก็จะไม่สามารถสร้างกระแสไฟฟ้าในวงจรได้ แต่จะเกิดเพียงแรงดันไฟฟ้าเหนี่ยวนำที่ปลายทั้งสองข้างของคอยล์ B เท่านั้น เนื่องจากไม่มีกระแสไหลผ่านวงจร จึงไม่มีการกระจายสนามแม่เหล็กในพื้นที่ตามมาด้วย อย่างไรก็ตาม หากคอยล์ B เป็นวงจรปิด จะต้องเกิดกระแสไฟฟ้าในวงจรแน่นอน ซึ่งเรียกว่ากระแสเหนี่ยวนำ และพร้อมกันนั้น เนื่องจากมีกระแสเหนี่ยวนำนี้เอง จึงเกิดการกระจายสนามแม่เหล็กในพื้นที่ในทิศทางตรงข้าม ตามความสัมพันธ์เชิงพื้นที่ระหว่างคอยล์ B และคอยล์ A คอยล์ A จะต้องแบ่งปันฟลักซ์แม่เหล็กที่กระจายออกมาจากคอยล์ B ด้วย แล้วผลลัพธ์สุดท้ายของการเหนี่ยวนำซึ่งกันและกันแบบนี้จะเป็นอย่างไร ชัดเจนว่า หากคอยล์ A มีเพียงกระแสไฟฟ้าคงที่ คอยล์ B จะไม่รับรู้ถึงการเปลี่ยนแปลงของฟลักซ์แม่เหล็กที่มันแบ่งร่วมกันอยู่ในตำแหน่งที่คงที่ ดังนั้น การเหนี่ยวนำซึ่งกันและกันจะเกิดขึ้นได้ก็ต่อเมื่อมีกระแสไฟฟ้าที่เปลี่ยนแปลง (เช่น กระแสสลับ) เกิดขึ้นในคอยล์ A เท่านั้น ในกรณีที่เป็นสถานการณ์แบบคู่ต่อคู่ (พิจารณาเฉพาะกรณีที่คอยล์หนึ่งทำงานร่วมกับอีกคอยล์หนึ่ง) กระแสไฟฟ้าเหนี่ยวนำจะมีผลเสมอในการต่อต้านการเปลี่ยนแปลงของฟลักซ์แม่เหล็ก ดังนั้น ผลกระทบของคอยล์ B ที่มีต่อคอยล์ A จะช่วยหักล้างการเปลี่ยนแปลงของฟลักซ์แม่เหล็กที่คอยล์ A แบ่งร่วมกับคอยล์ B พลังงานฟลักซ์แม่เหล็กที่คอยล์ทั้งสองแบ่งร่วมกันจะหักล้างการเปลี่ยนแปลงซึ่งกันและกัน
การเหนี่ยวนำแบบสนามแม่เหล็ก (Magnetic field coupling) ในตำแหน่งคงที่ (ต่างจากการใช้งานในมอเตอร์ไฟฟ้าหรือเครื่องกำเนิดไฟฟ้า) อธิบายถึงปฏิกิริยาที่เกิดขึ้นระหว่างขดลวดต่างๆ จากการใช้สนามแม่เหล็กร่วมกันภายใต้สภาวะกระแสสลับ การทำงานของหม้อแปลง (Transformer) เพื่อแปลงพลังงานหรือแยกสัญญาณ หรือการทำงานในฐานะตัวเหนี่ยวนำแบบ Common Mode เพื่อชดเชยกระแสไฟฟ้านั้น จัดเป็นกรณีหนึ่งของการเหนี่ยวนำแบบสนามแม่เหล็ก เมื่อออกแบบหรือผลิตตัวเหนี่ยวนำแบบ Common Mode จะต้องเผชิญกับคำถามสำคัญอยู่เสมอว่า พารามิเตอร์ใดบ้างที่ขดลวดทั้งสองข้างจะต้องรับประกันให้ตรงตามความต้องการ หรือ นอกจากค่ากระแสและค่าอินดักแตนซ์ของแต่ละด้านแล้ว ยังมีข้อกำหนดอื่น ๆ อะไรบ้างที่จำเป็นต้องพิจารณาความสัมพันธ์ระหว่างขดลวดทั้งสอง ข้อกำหนดที่พบบ่อยคือ ค่าความผิดพลาดในการตรวจจับ (sensing error) ของทั้งสองด้านจะต้องมีขนาดเล็กพอสมควร หรือบางครั้งค่าสัมประสิทธิ์การเหนี่ยวนำ (coupling coefficient) จะต้องสูงมากพอ (เช่น สูงถึง 98%) เนื่องจากในตัวเหนี่ยวนำแบบ Common Mode ชนิดชดเชยกระแส หากค่าอินดักแตนซ์รั่ว (leakage inductance) มีขนาดใหญ่เกินไป จะส่งผลกระทบอย่างมากต่อสัญญาณแบบ Differential Mode ไม่ว่าจะเป็นการเพิ่มอิมพีแดนซ์แบบ Differential Mode โดยไม่จำเป็น (ทำให้สัญญาณลดลงหรือแบนด์วิธของโหมดต่างลดลง) หรือทำให้แกนแม่เหล็กเข้าสู่จุดอิ่มตัว (magnetic core saturation) และส่งผลต่อการลดเสียงรบกวนแบบ Common Mode ดังนั้นจึงจำเป็นต้องควบคุมค่าสัมประสิทธิ์การเหนี่ยวนำของสนามแม่เหล็ก
เมื่อการเหนี่ยวนำสนามแม่เหล็กเกิดขึ้นระหว่างขดลวดสองขดผ่านตัวกลางที่เชื่อมต่อ (แกนแม่เหล็ก) ที่มีค่าความซึมแม่เหล็กสม่ำเสมอ ฟลักซ์แม่เหล็กที่ขดลวด A ส่งไปยังขดลวด B จะมีค่าเท่ากับ  ตรงกันข้าม มีค่าเท่ากับ
ตรงกันข้าม มีค่าเท่ากับ  ดังนั้น เนื่องจากฟลักซ์แม่เหล็กที่แบ่งปันร่วมกัน (การเหนี่ยวนำสนามแม่เหล็ก) สอดคล้องกับความเหนี่ยวนำร่วม (Mutual Inductance) จึงสามารถกำหนดให้เป็นการจัดประเภทการใช้งานและการเลือกความเหนี่ยวนำแบบโหมดร่วม (Common Mode Inductance) และการจัดประเภทการใช้งานและการเลือกความเหนี่ยวนำแบบโหมดร่วมตามลำดับ
ดังนั้น เนื่องจากฟลักซ์แม่เหล็กที่แบ่งปันร่วมกัน (การเหนี่ยวนำสนามแม่เหล็ก) สอดคล้องกับความเหนี่ยวนำร่วม (Mutual Inductance) จึงสามารถกำหนดให้เป็นการจัดประเภทการใช้งานและการเลือกความเหนี่ยวนำแบบโหมดร่วม (Common Mode Inductance) และการจัดประเภทการใช้งานและการเลือกความเหนี่ยวนำแบบโหมดร่วมตามลำดับ  และ
และ  :
:


ฟลักซ์แม่เหล็กที่แบ่งปันรวมกันที่ปลายขดลวดเหนี่ยวนำ ยังเป็นที่รู้จักกันในชื่อ ลิงค์เกจ (Linkage,  ), ซึ่งสามารถแสดงได้จากความสัมพันธ์
), ซึ่งสามารถแสดงได้จากความสัมพันธ์  ที่อ้างอิงจากความหนาแน่นของฟลักซ์แม่เหล็ก
ที่อ้างอิงจากความหนาแน่นของฟลักซ์แม่เหล็ก  และเวกเตอร์แม่เหล็ก
และเวกเตอร์แม่เหล็ก  ตำแหน่ง:
ตำแหน่ง:

เวกเตอร์แม่เหล็กที่กระจายโดยขดลวด A ที่แต่ละจุดบนขดลวด B มีค่า (ในกรณีเฉลี่ยของการประยุกต์ใช้และการเลือก โดยมีระยะห่างจากศูนย์กลางถึงศูนย์กลาง  ของความเหนี่ยวนำแบบโหมดร่วม):
ของความเหนี่ยวนำแบบโหมดร่วม):
การเชื่อมโยงฟลักซ์ระหว่างขดลวด A และขดลวด B คำนวณได้ดังนี้:

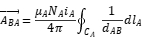
ดังนั้น การเหนี่ยวนำแม่เหล็กไฟฟ้าแบบร่วมกัน  ที่กระทำต่อขดลวด A โดยขดลวด B มีค่าดังนี้:
ที่กระทำต่อขดลวด A โดยขดลวด B มีค่าดังนี้:
หลักการเดียวกันนี้สามารถนำไปประยุกต์ใช้เพื่อหาค่า  สมการสำหรับ:
สมการสำหรับ:
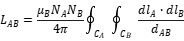
ตามที่กล่าวไว้ก่อนหน้านี้ การเชื่อมโยงสนามแม่เหล็กเกิดขึ้นระหว่างขดลวดสองขดผ่านตัวกลางที่เป็นแม่เหล็ก (แกนแม่เหล็ก) ที่มีความสามารถในการนำแม่เหล็กสม่ำเสมอ ดังนั้น  , ชัดเจนว่า:
, ชัดเจนว่า:

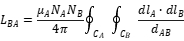
คำอธิบายข้างต้นแสดงให้เห็นว่า ขดลวดสองขดที่พันบนแกนแม่เหล็กเดียวกันจะมีค่าการเหนี่ยวนำแม่เหล็กไฟฟ้าแบบร่วมกันเท่ากัน ซึ่งแสดงโดย M การพิสูจน์อย่างละเอียดสามารถศึกษาเพิ่มเติมได้จากสูตรของนอยมันน์ ปัจจุบัน สมมติว่าฟลักซ์แม่เหล็กทั้งหมด  ของขดลวด A ส่วนที่ใช้ร่วมกัน
ของขดลวด A ส่วนที่ใช้ร่วมกัน  สัดส่วนของ
สัดส่วนของ  , กล่าวคือ
, กล่าวคือ  . ดังนั้น สัมประสิทธิ์การแบ่งปันของขดลวด B คือ
. ดังนั้น สัมประสิทธิ์การแบ่งปันของขดลวด B คือ  , จะได้:
, จะได้:

ดังนั้น ความสัมพันธ์ระหว่างแรงเหนี่ยวนำร่วม (mutual inductance) ระหว่างขดลวดสองเส้นกับแรงเหนี่ยวนำเฉพาะตัวของแต่ละเส้นสามารถหาได้จากสมการดังกล่าว:

ทั้งหมดข้างต้นคือที่มาของสัมประสิทธิ์การเชื่อมโยงสนามแม่เหล็ก k: ค่าอินดักแทนซ์โหมดร่วมที่แท้จริงสามารถกำหนดได้โดยการวัดค่าอินดักแทนซ์ของขดลวดทั้งสองแยกกัน (ขดลวดอีกขดหนึ่งอยู่ในสภาพเปิดวงจร) เช่นเดียวกับอินดักแทนซ์รั่ว (ขดลวดอีกขดหนึ่งอยู่ในสภาพปิดวงจร)  และค่าที่เกี่ยวข้องของแรงเหนี่ยวนำร่วมและสัมประสิทธิ์การเชื่อมโยง k โดยเฉพาะสำหรับตัวเหนี่ยวนำโหมดร่วมที่มีความสมมาตรสูงมาก ซึ่งถูกพันบนแกนแม่เหล็กรูปวงแหวนที่มีค่าเพอร์เมียบิลิตี้สูง (เช่น แม่เหล็กเฟอไรต์ MnZn) ค่าอินดักแทนซ์ของขดลวดทั้งสองจะใกล้เคียงกันมาก และขนาดของอินดักแทนซ์รั่วจะใกล้เคียงกับ
และค่าที่เกี่ยวข้องของแรงเหนี่ยวนำร่วมและสัมประสิทธิ์การเชื่อมโยง k โดยเฉพาะสำหรับตัวเหนี่ยวนำโหมดร่วมที่มีความสมมาตรสูงมาก ซึ่งถูกพันบนแกนแม่เหล็กรูปวงแหวนที่มีค่าเพอร์เมียบิลิตี้สูง (เช่น แม่เหล็กเฟอไรต์ MnZn) ค่าอินดักแทนซ์ของขดลวดทั้งสองจะใกล้เคียงกันมาก และขนาดของอินดักแทนซ์รั่วจะใกล้เคียงกับ  . จะเห็นได้ว่าสัมประสิทธิ์การเชื่อมโยงยิ่งสูง อินดักแทนซ์รั่วจะยิ่งต่ำลง
. จะเห็นได้ว่าสัมประสิทธิ์การเชื่อมโยงยิ่งสูง อินดักแทนซ์รั่วจะยิ่งต่ำลง
2- การประยุกต์ใช้ตัวเหนี่ยวนำแบบมอดูเลสเชิงเดียวกัน
อย่างที่ได้กล่าวไว้ในตอนต้นบทความนี้ หม้อแปลงโหมดร่วม (Common mode inductor) ก็คืออินดักเตอร์ที่ถูกต่อกับวงจรกระแสไฟฟ้าสองเส้นทางพร้อมกัน มีหน้าที่ในการกดหรือลดสัญญาณรบกวนแบบโหมดร่วม (Common mode noise) ที่อาจเกิดขึ้นบนวงจรกระแสไฟฟ้าทั้งสองเส้นทาง อย่างไรก็ตาม วงจรกระแสไฟฟ้าสองเส้นทางที่ต่อกันแบบขนานนี้ ไม่ได้จำกัดอยู่แค่กรณีที่สร้างเป็นวงจรเชิงความแตกต่าง เช่น เส้นทางสายไฟ L และ N ในสายจ่ายไฟคู่หนึ่ง หรือเส้นทางสาย D+ และ D- บนพอร์ตของสายข้อมูล เนื่องจากการเกิดสัญญาณรบกวนแบบโหมดร่วม บางครั้งจึงจำเป็นต้องมีการกดสัญญาณรบกวนโหมดร่วมระหว่างเส้นทางส่งสัญญาณที่ใช้กราวด์ร่วมกัน
เพื่อที่จะกำหนดการประยุกต์ใช้งานของอินดักเตนซ์แบบ Common Mode เราจำเป็นต้องเข้าใจก่อนว่าสัญญาณรบกวนแบบ Common Mode เกิดขึ้นได้อย่างไร: ตามรูปที่ 2 (แบบอ้างอิงสำหรับแหล่งจ่ายไฟแบบสวิตชิ่ง 60W ของ Infineon: DEMO_5QSAG_60W1) ขั้วต่อขาเข้าคือแหล่งจ่ายไฟหลักที่มีแรงดัน 85~300VAC และสาย L, N บนพอร์ตจ่ายไฟจะสร้างจุดกราวนด์ร่วมกับกราวนด์อ้างอิง โดยความเป็นจริงแล้วมีสายกราวนด์สีเขียว (Green Line) เชื่อมต่อกับกราวนด์อ้างอิงนี้และต่อกับกราวนด์ทางกายภาพด้วย ขณะนี้สาย L และ N จะทำหน้าที่เป็นวงจรจ่ายไฟ และเชื่อมต่อกับด้านปฐมภูมิของหม้อแปลง Flyback ตัวนี้ สวิตช์หลัก Q11 มีการกำหนดให้ใช้ทรานซิสเตอร์ MOS ชนิด Super Junction 800V รุ่น IPA80R600P7 โดยมีค่าความต้านทาน Rds (on) สูงสุดอยู่ที่ 600mΩ เพื่อจำกัดความร้อนที่เกิดขึ้น ตัวระบายความร้อน (ครีบอลูมิเนียมระบายความร้อน) มักถูกติดตั้งไว้ที่เปลือกเครื่อง ซึ่งจะเพิ่มค่าความจุไฟฟ้าแบบ stray capacitance ระหว่างพินแรงดันสูงกับกราวนด์ ทำให้เกิดการเหนี่ยวนำแบบ capacitive coupling และนำแรงดันจากปลายทางขาเข้าที่มีความถี่สูงมาสร้างศักย์ไฟฟ้าที่มีลักษณะเป็นสัญญาณรบกวน นอกจากนี้ สาย L และ N ที่ขั้วต่อขาเข้าจะได้รับศักย์ไฟฟ้านี้ผ่านทางกราวนด์อ้างอิง จึงก่อให้เกิดแหล่งกำเนิดสัญญาณรบกวนแบบ Common Mode ควรสังเกตว่า การเหนี่ยวนำแบบ capacitive coupling นี้เป็นแหล่งสัญญาณรบกวนแบบ Common Mode หลักที่การทดสอบ EMC ในโหมด Conduction ต้องเผชิญ ซึ่งมีอยู่อย่างแพร่หลายในแหล่งจ่ายไฟที่มี AC-DC เป็นโครงสร้างหลักและมีโครงสร้าง topology ที่แตกต่างกัน นอกจากนี้ ยังมีวงจรกระแสเล็กๆ อีกหลายวงจรบนด้านปฐมภูมิและทุติยภูมิของหม้อแปลง แต่ละวงจรย่อยเหล่านี้ก็เพิ่มกระแสสัญญาณรบกวนจากการเหนี่ยวนำแบบ Inductive coupling ซึ่งนำมาซึ่งสัญญาณรบกวนแบบ Common Mode หรือ Differential Mode ที่คาดเดาได้ยาก ดังนั้นจึงก่อให้เกิดความไม่แน่นอนจำนวนมากในการแก้ไขปัญหา EMC ซึ่งเป็นเหตุผลสำคัญว่าทำไมในปัจจุบันยังไม่สามารถพึ่งพาซอฟต์แวร์จำลองเพื่อทำการจำลองความเข้ากันได้ทางแม่เหล็กไฟฟ้า (EMC Simulation) ได้
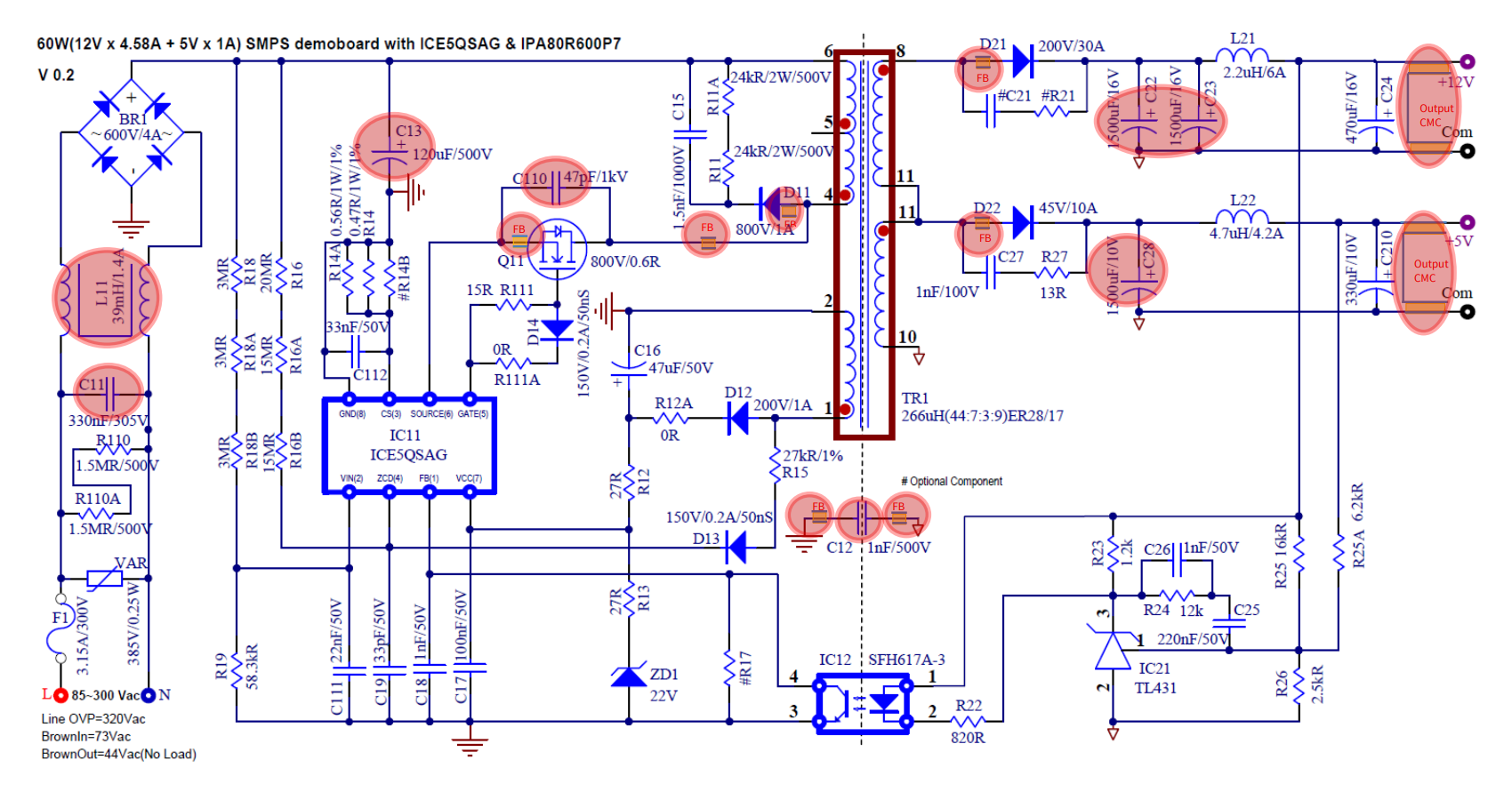

รูปที่ 2 ตัวอย่างองค์ประกอบของกลยุทธ์ตอบสนอง EMI (Infineon DEMO_5QSAG_60W1)
ในการประมาณขนาดของสัญญาณรบกวนแบบ Common Mode โดยปกติจำเป็นต้องสมมติค่าความจุไฟฟ้ารั่ว (stray capacitance) ในวงจรของสัญญาณรบกวนแบบ common mode ซึ่งโดยทั่วไปจะอยู่ในช่วงไม่กี่สิบพิโกฟารัด ในตัวอย่างที่แสดงในรูปที่ 2 หากสมมติให้ความจุไฟฟ้ารั่วเท่ากับ 20pF เมื่อแหล่งจ่ายไฟขาเข้ามีค่า 230Vac และความถี่การทำงานของสวิตช์กำลังหลักอยู่ที่ 200KHz เวลาเปิด-ปิดรวมกันมีค่า 1 µs โดยขอบขึ้น (rising edge) และขอบลง (falling edge) มีค่า 0.2 µs ตามลำดับ แรงดันสูงสุดที่ขั้วต่อขาเข้าคือ  , ค่าดิวตี้ไซเคิลของแหล่งจ่ายไฟ AC ที่ผ่านสวิตช์คือ
, ค่าดิวตี้ไซเคิลของแหล่งจ่ายไฟ AC ที่ผ่านสวิตช์คือ  . ความถี่มุมแรก (first corner frequency) ในการแจกแจงความหนาแน่นของสเปกตรัมคือ:
. ความถี่มุมแรก (first corner frequency) ในการแจกแจงความหนาแน่นของสเปกตรัมคือ:
แรงดันที่เกี่ยวข้องกับจุดสูงสุดแรก (ฮาร์โมนิกที่ 1, 1st harmonic) ในการแจกแจงความหนาแน่นของสเปกตรัมคือ:

ในวงจรที่มีสัญญาณรบกวนโหมดร่วม (common mode noise) โดยไม่ต้องเชื่อมต่ออินดักเตอร์โหมดร่วม (common mode inductor) สามารถคำนวณประมาณค่ากระแสไฟฟ้าโหมดร่วมสูงสุดได้โดยการเพิกเฉยต่อความต้านทานแบบอนุกรมสมมูล (เช่น ความต้านทานของสายไฟ อินดัคแตนซ์แบบพาราซิติก เป็นต้น) ดังแสดงในรูปที่ 3 เมื่อเชื่อมต่อกับ LISN (linear impedance stabilization network) ขนาดของกระแสไฟฟ้าโหมดร่วมจะเป็น:
ดังนั้น แอมพลิจูดของแรงดันไฟฟ้าโหมดร่วมที่เครื่องทดสอบนำเข้า (เครื่องวิเคราะห์สเปกตรัม) รับได้จากพอร์ต LISN จะเป็น:

ถึงแม้ผลลัพธ์จริงที่ตรวจพบบนเครื่องทดสอบจะเป็น:

กล่าวคือ แอมพลิจูดของสัญญาณรบกวนโหมดร่วมและโหมดต่าง (differential mode noise) มีการทับซ้อนกัน แต่เห็นได้ชัดเจนว่าตราบใดที่สามารถลดทอนโหมดร่วมได้ ก็จะทำให้ผลการทดสอบสุดท้ายดีขึ้น ดังนั้น ตัวอย่างเช่น ในมาตรฐาน EMC แบบ EN55022 สำหรับการใช้งานทางด้านการสื่อสารและอุตสาหกรรมทั่วไป แอมพลิจูด QP จะต้องต่ำกว่า  ในช่วงความถี่ 150KHz ถึง 500KHz ดังนั้น ค่าสูงสุด
ในช่วงความถี่ 150KHz ถึง 500KHz ดังนั้น ค่าสูงสุด  การลดทอนสัญญาณรบกวนแบบ Common Mode ต้องดำเนินการที่นี่ โดยใช้ค่าเป้าหมายการลดทอน -20dB เป็นตัวอย่าง เมื่อคำนวณอย่างง่าย ความต้านทานหลักในวงจรแบบ Common Mode จะเป็นความต้านทานของความจุไฟฟ้ารั่วซึ่งมีค่าประมาณ 25K Ω ดังแสดงในรูปที่ 4 ความต้านทานแบบ Common Mode ที่จำเป็นต้องใช้มีค่าประมาณ 250K Ω ซึ่งสามารถแปลงออกมาเป็นขดลวดแบบ Common Mode ที่มีค่าเหนี่ยวนำ 125mH
การลดทอนสัญญาณรบกวนแบบ Common Mode ต้องดำเนินการที่นี่ โดยใช้ค่าเป้าหมายการลดทอน -20dB เป็นตัวอย่าง เมื่อคำนวณอย่างง่าย ความต้านทานหลักในวงจรแบบ Common Mode จะเป็นความต้านทานของความจุไฟฟ้ารั่วซึ่งมีค่าประมาณ 25K Ω ดังแสดงในรูปที่ 4 ความต้านทานแบบ Common Mode ที่จำเป็นต้องใช้มีค่าประมาณ 250K Ω ซึ่งสามารถแปลงออกมาเป็นขดลวดแบบ Common Mode ที่มีค่าเหนี่ยวนำ 125mH
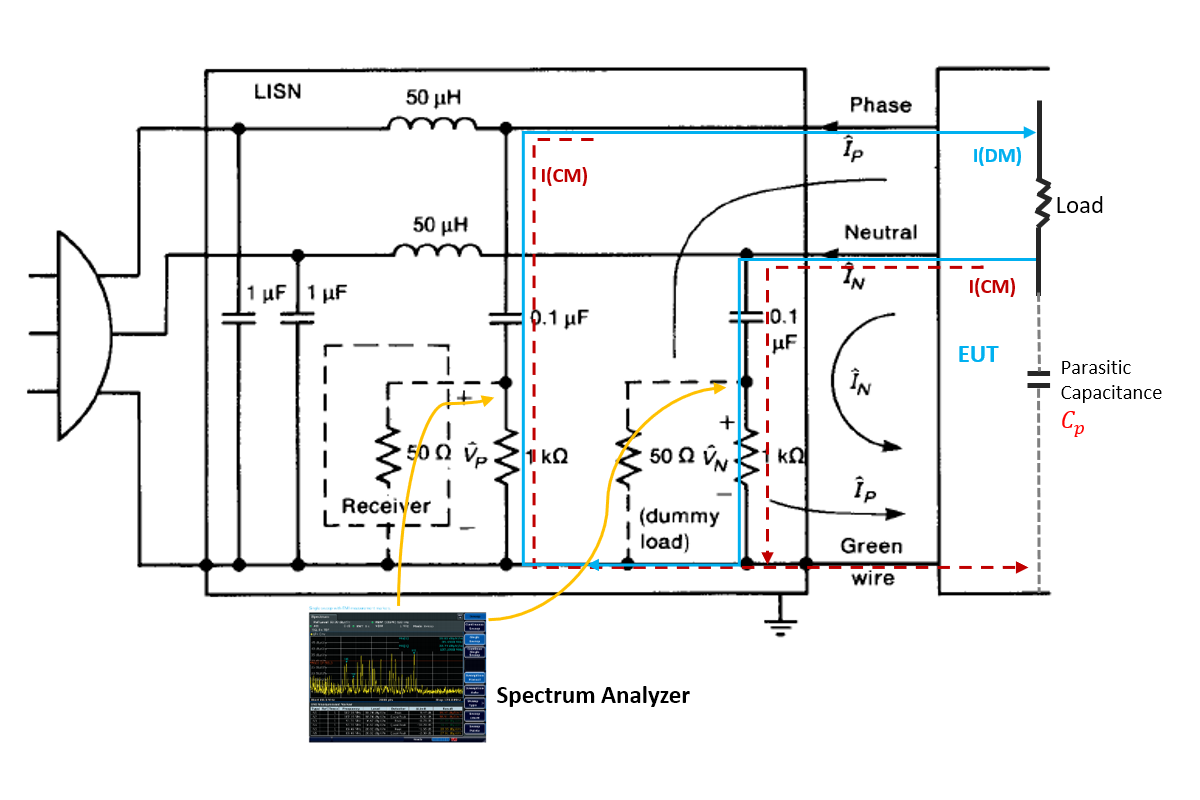
รูปที่ 3 แผนภาพของการทดสอบนำสัญญาณในการทดสอบ EMC (แผนภาพวงจรของสัญญาณรบกวนแบบ Common Mode และสัญญาณแบบ Differential Mode)
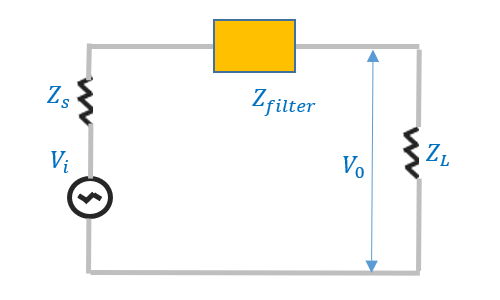
รูปที่ 4 ความสัมพันธ์ระหว่างวงจรการสูญเสียจากการแทรกของตัวกรอง (ด้านซ้าย) กับแอมพลิจูดการลดทอนที่เกี่ยวข้องและค่าความต้านทานของตัวกรอง (ด้านขวา)
นอกจากการใช้งานอินดักเตนซ์โหมดร่วม (Common Mode Inductance) บนสายไฟฟ้าในแบบทั่วไปแล้ว อินดักเตนซ์โหมดร่วมยังพบได้บ่อยบนสายสัญญาณความเร็วสูง เช่น USB 3.0, HDMI, LAN เป็นต้น หรือบางสายสัญญาณ LVDS เช่น CAN BUS, SPI หรือ RS232, RS485 เป็นต้น การใช้อินดักเตอร์โหมดร่วมบนสายสัญญาณนี้ยังมีหน้าที่ในการลดสัญญาณรบกวนแบบโหมดร่วม เช่น การปฏิเสธอัตราส่วนของโหมดร่วม (Common Mode Rejection Ratio) เพื่อให้เป็นไปตามข้อกำหนดเฉพาะของการสื่อสาร อย่างไรก็ตามประเด็นที่สำคัญกว่านั้นคือผลลัพธ์จากการชดเชยกระแสไฟฟ้าร่วมกัน (Current Compensation Effect) ที่กล่าวถึงในตอนต้น ซึ่งหมายถึงอินดักเตอร์โหมดร่วมชนิดชดเชยกระแสไฟฟ้า
ดังแสดงในรูปที่ 5 สายสัญญาณความเร็วสูงโดยทั่วไปจะใช้การส่งแบบเชิงอนุพันธ์ (differential transmission) เพื่อส่งสัญญาณ บนสายสัญญาณนั้นมีตัวต้านทาน ตัวเก็บประจุกระจาย (stray capacitors) และตัวเหนี่ยวนำแบบกระจาย (distributed inductors) การใช้สายคู่บิด (Twisted pair cables) สามารถลดตัวเก็บประจุกระจายได้อย่างมีประสิทธิภาพ แต่ไม่สามารถกำจัดตัวเหนี่ยวนำแบบกระจายได้ ดังนั้นจึงมีอินดักแทนซ์ขาเข้าแบบเชิงอนุพันธ์อยู่ที่ปลายทางรับสัญญาณ และกระแสที่ผูกพันกันบนสายจะสร้างเสียงรบกวนบนสัญญาณกราฟ สัญญาณรบกวนเหล่านี้จะถูกแจกจ่ายเกือบเท่ากันทั้งสองข้างของตัวรับตามสมมาตรของสายส่ง เมื่อตอนนี้มีการติดตั้งตัวเหนี่ยวนำแบบโหมดร่วม (common mode inductor) ไว้ที่ตำแหน่งขาเข้าของตัวรับ สัญญาณรบกวนที่เกือบเท่ากันนี้จะถูกยกเลิกผ่านการผูกพันแบบขดลวด (winding coupling) ของตัวเหนี่ยวนำแบบโหมดร่วม ทำให้สัญญาณรบกวนจากการผูกพันลดลงอย่างมาก กล่าวคือ ผลการชดเชยกระแสไฟฟ้าช่วยลดเสียงรบกวนขาเข้าที่ตัวรับ
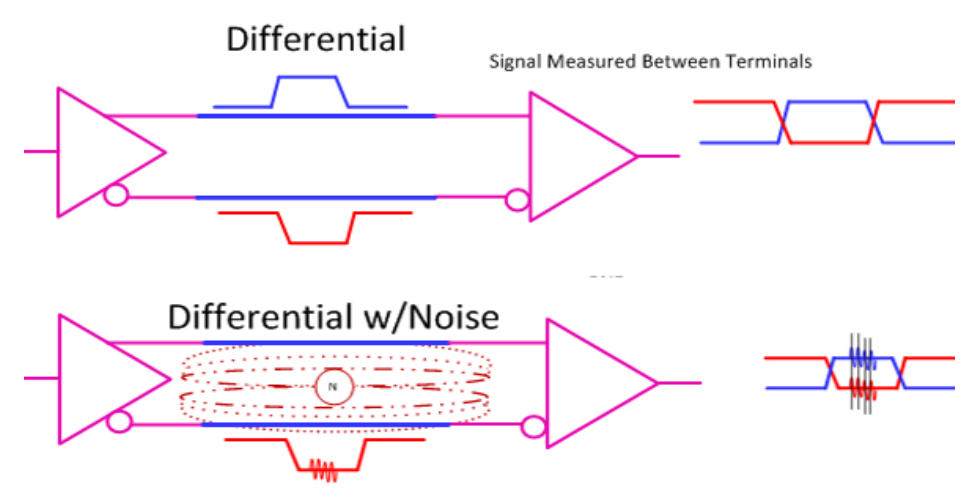
รูปที่ 6 กระบวนการส่งผ่านของสัญญาณเชิงอนุพันธ์ตามเส้นทางการส่งจากต้นทางไปยังปลายทาง (ด้านซ้าย) และการปรับปรุงโดยใช้อินดักเตอร์โหมดร่วมที่ปลายทาง (ด้านขวา)
จากแผนภาพตาของสัญญาณที่แสดงในรูปที่ 6 การลดการสูญเสียจากการแทรกสอดเนื่องจากความเหนี่ยวนำแบบกระจายของสาย จะช่วยปรับปรุงอัตราส่วนสัญญาณต่อสัญญาณรบกวน (signal-to-noise ratio) ซึ่งมีความสำคัญสำหรับสายส่งระยะไกล หรือสายสัญญาณความเร็วสูง โดยทั่วไปแล้ว สายส่งที่ใช้สำหรับพอร์ตสัญญาณที่กล่าวถึงข้างต้น มักจะเป็นสายส่งที่มีค่าอิมพีแดนซ์อยู่ในช่วง 90~120 โอห์ม ทั้งนี้ ขึ้นอยู่กับความต้องการด้านแบนด์วิดธ์ของสัญญาณเฉพาะเจาะจง ตัวเหนี่ยวนำแบบอิมพีแดนซ์โหมดร่วม (common mode inductors) ที่เลือกใช้มักมีค่าตั้งแต่ 1 ถึง 10 เท่า เพื่อให้สามารถลดทอนโหมดร่วมได้ตั้งแต่ -6dB ถึง -20dB ซึ่งคล้ายกับกรณีของการประยุกต์ใช้งานกับแหล่งจ่ายไฟฟ้าที่กล่าวไว้ก่อนหน้า โดยขึ้นอยู่กับขนาดของอิมพีแดนซ์ในวงจรของสัญญาณรบกวนโหมดร่วม แน่นอนว่า เมื่อความถี่เพิ่มขึ้น (ตามความต้องการในการส่งสัญญาณความเร็วสูง) อิมพีแดนซ์โหมดร่วมของระบบจะลดลง และการให้ค่าความเหนี่ยวนำมากเกินไปจะทำให้แถบความถี่ในการกรองแคบลง ดังนั้นจึงจำเป็นต้องตรวจสอบว่าค่าความเหนี่ยวนำที่เลือกไว้นั้นตรงกับความต้องการในการส่งสัญญาณความเร็วสูงหรือไม่
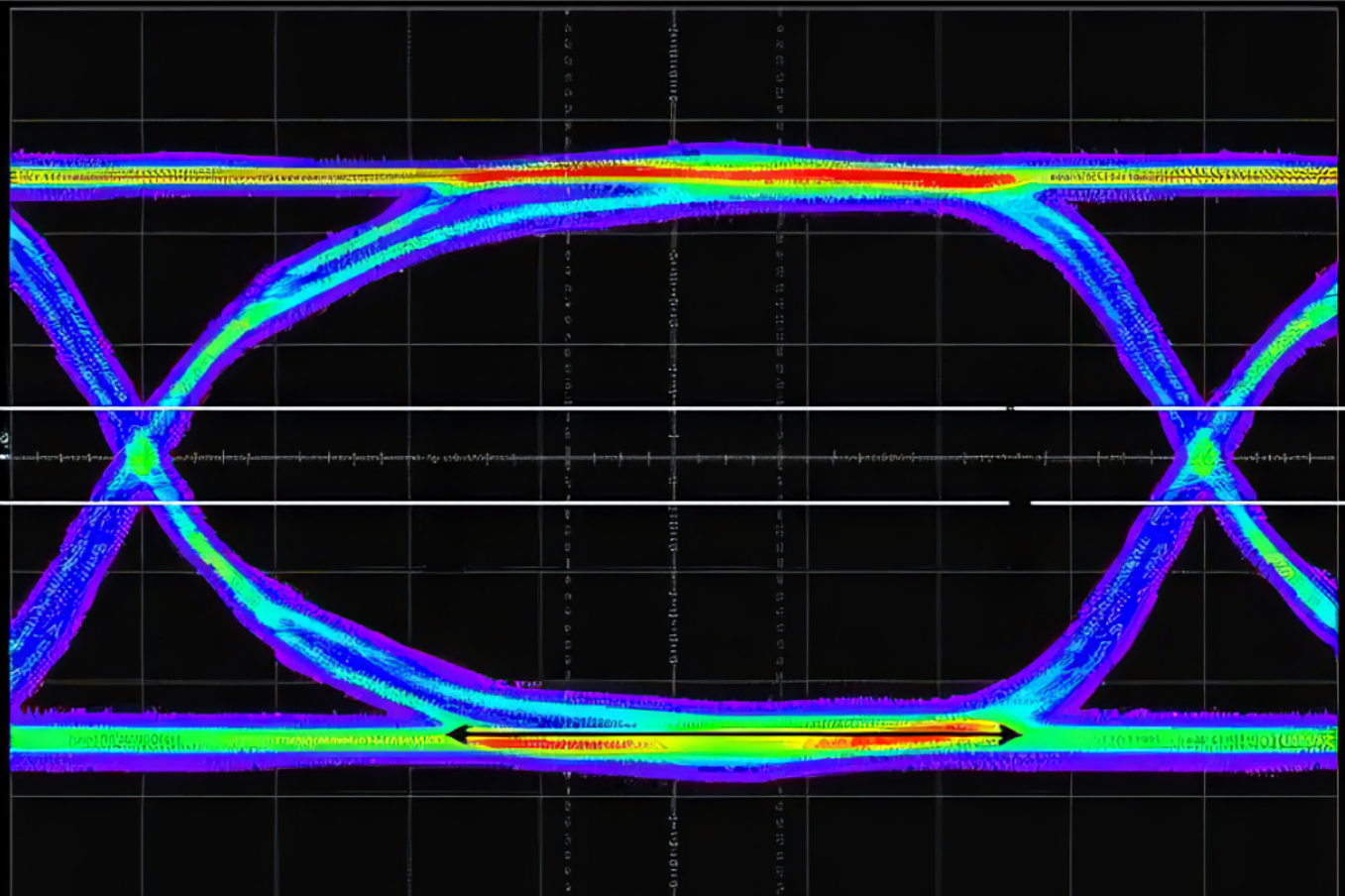
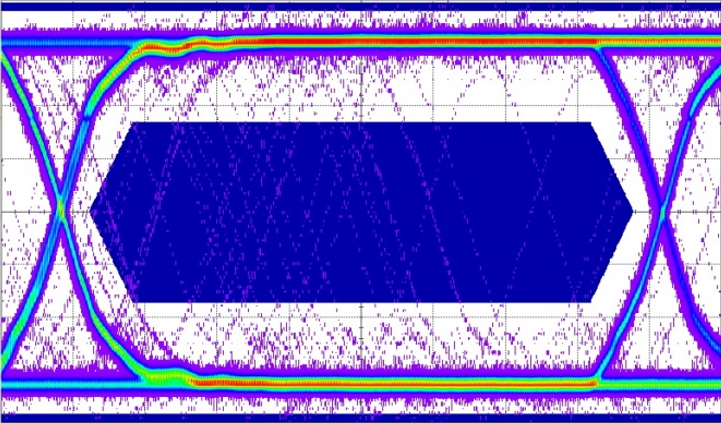
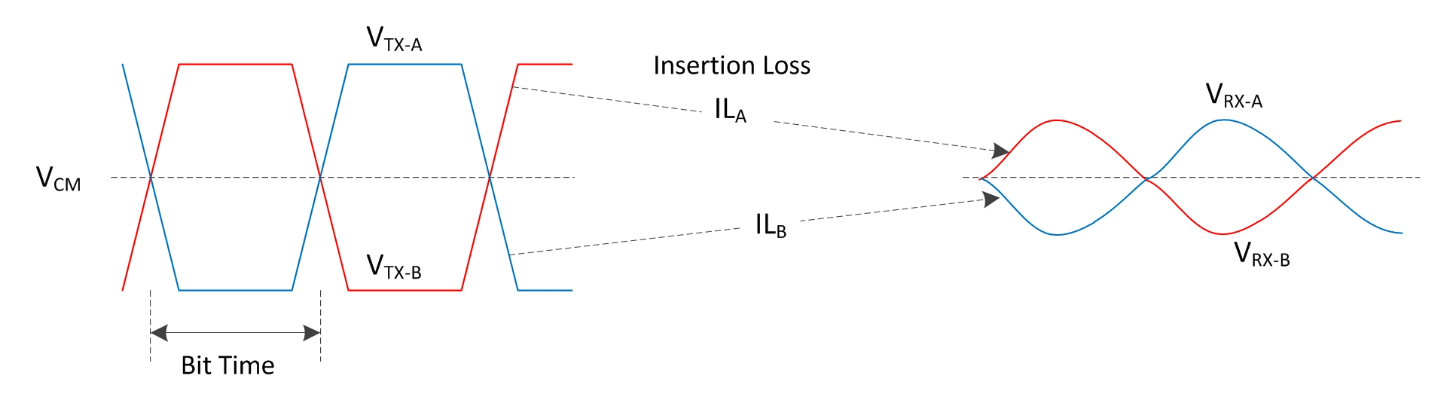
รูปที่ 6 แผนภาพแบบผังของคุณภาพสัญญาณที่ได้รับผลกระทบจากการสูญเสียบนสายส่งแบบดิฟเฟอเรนเชียล
3- อันตรายของสัญญาณรบกวนเชิงเดียวกัน
ดังนั้น ปัญหาของสัญญาณรบกวนแบบ Common Mode คืออะไร? ทำไมในการทดสอบ EMC จึงมักจำเป็นต้องเน้นการลดทอนสัญญาณรบกวนแบบ common mode ในวงจร? แน่นอนว่าเพื่อให้เป็นไปตามมาตรฐานการรับรอง EMC ของประเทศต่างๆ จำเป็นต้องจำกัดแอมพลิจูดของสัญญาณแบบ common mode และ differential mode เพื่อให้ผลิตภัณฑ์มีความปลอดภัย และลดผลกระทบเชิงลบใดๆ ที่อาจเกิดขึ้นต่อระบบสายส่งไฟฟ้าหรืออุปกรณ์รอบข้างจากอุปกรณ์ไฟฟ้าฝั่งผู้ใช้ ประการที่สอง จากมุมมองด้านความสมบูรณ์ของพลังงานและสัญญาณ (Power Integrity and Signal Integrity) อุปกรณ์ไฟฟ้าและตัวควบคุมเครื่องใช้ไฟฟ้าส่วนใหญ่ทำงานที่แรงดันต่ำ ซึ่งแรงดันสัญญาณรบกวนที่เพิ่มเข้ามาอาจทำให้เกิดสัญญาณควบคุมหรือข้อมูลที่ถูกส่งออกไปผิดปกติ จนถึงขั้นเกิดข้อผิดพลาดและการหยุดทำงานได้ สัญญาณรบกวนที่ผิดปกติเหล่านี้ อาจมาจากทั้งแผงวงจรและสัญญาณรบกวน RF ของตัวมันเอง เช่น การตัดการเชื่อมต่อของอุปกรณ์เคลื่อนที่ หรือเสียงหวีดของคลื่นวิทยุรบกวน ในที่สุด หากสัญญาณรบกวนแบบ common mode มีระดับสูงเกินไป ก็มีแนวโน้มที่จะปล่อยออกมาในอากาศในรูปแบบของการแผ่รังสีความถี่สูง เช่น ในวงจรแบบ common mode ขนาดใหญ่ หรือบนตัวนำที่คล้ายกับเสาอากาศ ซึ่งอาจก่อให้เกิดอันตรายต่อสุขภาพในระยะยาวที่มนุษย์ไม่สามารถรับรู้ได้
เพื่อให้ปัญหาเข้าใจง่ายขึ้น เราจะเทียบสายส่งกำลังเป็นคู่แม่เหล็กแบบเฮิร์ตซ์ (Hertz magnetic couple) และได้รับโมเดลการแผ่รังสีแบบมอดสามัญ (common mode noise radiation model) ตามที่แสดงในรูปที่ 7 โดยระยะห่างระหว่างจุดทดสอบกับตำแหน่งศูนย์กลางของสายส่งแบบมอดสามัญคือ d ซึ่งโดยทั่วไปจะมากกว่าขนาดของวงจรไฟฟ้าอย่างมาก ดังนั้นจึงถือเป็นจุดทดสอบในสนามไกล (far-field test point) ดังนั้นสำหรับการแผ่รังสีของแอนเทนาในสนามไกล ความเข้มสนามจะมีค่าดังนี้:
ในจำนวนนั้น  คือค่าคงที่เฟสที่สอดคล้องกับความยาวคลื่นของการแผ่รังสี
คือค่าคงที่เฟสที่สอดคล้องกับความยาวคลื่นของการแผ่รังสี  คือระยะห่างระหว่างตำแหน่งทดสอบ
คือระยะห่างระหว่างตำแหน่งทดสอบ  คือมุมระนาบที่เบนออกจากแผนภาพการแผ่รังสีของแอนเทนา (radiation pattern) เป็น θ องศา และสำหรับคู่แม่เหล็กเฮิร์ตซ์
คือมุมระนาบที่เบนออกจากแผนภาพการแผ่รังสีของแอนเทนา (radiation pattern) เป็น θ องศา และสำหรับคู่แม่เหล็กเฮิร์ตซ์ ![]() , และ
, และ  , ขึ้นอยู่กับประเภทของแอนเทนา เนื่องจากการแผ่รังสีที่รับได้จากจุดไกลเกิดจากการทำงานพร้อมกันของสายมอดสามัญสองเส้นที่มุม
, ขึ้นอยู่กับประเภทของแอนเทนา เนื่องจากการแผ่รังสีที่รับได้จากจุดไกลเกิดจากการทำงานพร้อมกันของสายมอดสามัญสองเส้นที่มุม  ดังนั้น:
ดังนั้น:

สำหรับเสียงรบกวนแบบมอดสามัญ (common mode noise) ตามที่แสดงในรูปที่ 7:  และ
และ  สามารถหาค่าการแผ่รังสีสูงสุดที่จุดทดสอบได้ดังนี้:
สามารถหาค่าการแผ่รังสีสูงสุดที่จุดทดสอบได้ดังนี้:

เมื่อระยะห่างของสาย s มีค่าน้อยพอสมควร  ดังนั้นสามารถประมาณค่าได้ว่า:
ดังนั้นสามารถประมาณค่าได้ว่า:
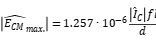
ดังนั้น ความเข้มของการแผ่รังสีแบบโหมดร่วม (Common Mode) จะแปรผันตามความยาวของสายส่งแบบโหมดร่วม และจะลดลงเมื่อระยะห่างเพิ่มขึ้น ตัวอย่างขนาดของแอมพลิจูดดังกล่าว: สมมุติว่าความยาวของสายส่งแบบโหมดร่วมเท่ากับ 1 เมตร และแอมพลิจูดของกระแสไฟฟ้าแบบโหมดร่วมเท่ากับ 7.96 µA ซึ่งตรงกับการทดสอบสนามที่ระยะ 3 เมตรในมาตรฐาน FCC Class B ที่ความถี่ 30MHz ความเข้มของการแผ่รังสีจะมีค่าเท่ากับ

ความเข้มนี้เท่ากับค่ามาตรฐานขีดจำกัดพอดี หากมีตัวนำไฟฟ้าหรือบุคคลหนึ่งคนที่ตำแหน่งทดสอบระยะ 3 เมตร จะรู้สึกได้ถึงแรงดันไฟฟ้า 100 µV การสัม exposure เป็นเวลานานในสภาพแวดล้อมเช่นนี้ มีผลกระทบอย่างร้ายแรงต่อสุขภาพมนุษย์ และรังสีสะสมอาจก่อให้เกิดโรคเรื้อรังต่างๆ หรือความเสียหายเฉพาะต่อร่างกาย ซึ่งเป็นเหตุผลสำคัญในการรับรอง EMC เช่นกัน
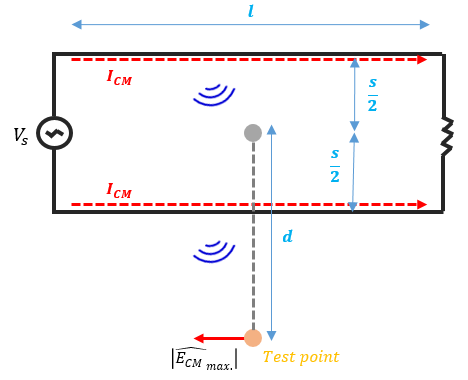
รูปที่ 7 แบบจำลองการแผ่รังสีและแผนภาพจุดทดสอบของสัญญาณรบกวนแบบโหมดร่วม
โครงสร้างของคลื่นในวงจรสวิตช์ส่วนใหญ่สามารถจัดประเภทได้ว่าเป็นคลื่นรูปสี่เหลี่ยมคางหมู (Trapezoidal Wave) และสเปกตรัมความถี่ของมันแสดงให้เห็นสองช่วงที่ความถี่ลดลง  ถึง
ถึง  เมื่อระดับฮาร์มอนิกส์เพิ่มขึ้น โหนดต่างๆ คือความถี่เชิงมุมแรกและเวลาขอบขึ้นของความถี่เชิงมุมที่เพิ่มขึ้น สเปกตรัมความถี่ของความเข้มรังสีแบบโหมดร่วมที่กล่าวถึงข้างต้นชัดเจนว่าเพิ่มขึ้นตามความถี่โดย
เมื่อระดับฮาร์มอนิกส์เพิ่มขึ้น โหนดต่างๆ คือความถี่เชิงมุมแรกและเวลาขอบขึ้นของความถี่เชิงมุมที่เพิ่มขึ้น สเปกตรัมความถี่ของความเข้มรังสีแบบโหมดร่วมที่กล่าวถึงข้างต้นชัดเจนว่าเพิ่มขึ้นตามความถี่โดย  ดังนั้นสำหรับแหล่งจ่ายไฟแบบสวิตชิ่งทั่วไปและวงจรสัญญาณคลื่นสี่เหลี่ยม จะพบว่าสเปกตรัมการแผ่รังสีแบบโหมดร่วมโดยรวมจะแสดงลักษณะการกระจายตัวโดยประมาณที่เพิ่มขึ้นในตอนแรกแล้วลดลงในตอนหลัง ดังแสดงใน รูป.8 ดังนั้นบริเวณตรงกลางคือส่วนที่จำเป็นต้องควบคุมหรือกดไว้เป็นพิเศษ
ดังนั้นสำหรับแหล่งจ่ายไฟแบบสวิตชิ่งทั่วไปและวงจรสัญญาณคลื่นสี่เหลี่ยม จะพบว่าสเปกตรัมการแผ่รังสีแบบโหมดร่วมโดยรวมจะแสดงลักษณะการกระจายตัวโดยประมาณที่เพิ่มขึ้นในตอนแรกแล้วลดลงในตอนหลัง ดังแสดงใน รูป.8 ดังนั้นบริเวณตรงกลางคือส่วนที่จำเป็นต้องควบคุมหรือกดไว้เป็นพิเศษ
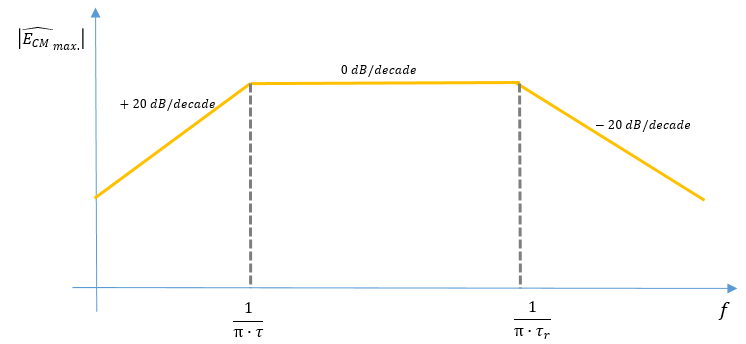
รูป.8 การกระจายความเข้มของเสียงรบกวนแบบโหมดร่วมที่เกี่ยวข้องกับคลื่นแบบสี่เหลี่ยมคางหมูทั่วไป
4- การเลือกตัวเหนี่ยวนำแบบมอดูเลสเชิงเดียวกัน
สำหรับสายส่งไฟฟ้า แหล่งที่มาของสัญญาณรบกวนแบบโหมดร่วม (Common Mode Noise) นั้นค่อนข้างชัดเจน แต่ปัจจัยเสริมต่างๆ มักวัดได้ยากด้วยเครื่องมือโดยตรง ในกรณีส่วนใหญ่ ผลลัพธ์จะถูกประมาณค่าอย่างค่อยเป็นค่อยไปจากการวิเคราะห์หลังการทดสอบ ดังนั้นประสบการณ์ที่สะสมมาจึงมีความสำคัญมาก เมื่อครั้งแนะนำการใช้งานตัวเหนี่ยวนำแบบโหมดร่วมในส่วนที่ 2 ของบทความนี้ ก็ได้กล่าวไว้แล้วว่า การคำนวณโดยทฤษฎีเกี่ยวกับแอมพลิจูดของสัญญาณรบกวนแบบโหมดร่วม และค่าความเหนี่ยวนำที่ต้องการของตัวเหนี่ยวนำแบบโหมดร่วม สามารถนำมาใช้เป็นจุดเริ่มต้นสำหรับการทดลองในระยะแรกได้
โดยปกติแล้ว ตัวเหนี่ยวนำแบบมอดสามัญ (Common Mode Inductor) ที่ใช้ในขั้นตอนกรองของแหล่งจ่ายไฟ AC-DC จะใช้โครงสร้างวงแหวนแม่เหล็กแบบปิดเป็นแกนแม่เหล็ก ข้อดีของโครงสร้างนี้คือสามารถทำให้เกิดค่าอินดักแตนซ์รั่ว (Leakage Inductance) ต่ำมาก และค่าสัมประสิทธิ์การเหนี่ยวนำร่วม (Coupling Coefficient) สูงมากได้อย่างง่ายดาย สำหรับแรงดันขาเข้าสูงและความถี่ในการสลับค่อนข้างต่ำ มันสามารถให้ค่าอิมพีแดนซ์มอดสามัญ (Common Mode Impedance) สูงเพื่อช่วยลดทอนสัญญาณรบกวนมอดสามัญที่มีแอมพลิจูดสูงได้ เนื่องจากค่าความซึมซาดทางแม่เหล็ก (Magnetic Permeability) ของวัสดุแม่เหล็กสามารถแบ่งออกเป็นส่วนที่เป็นเชิงอินดักทีฟ ![]() และส่วนที่เป็นการสูญเสียพลังงาน
และส่วนที่เป็นการสูญเสียพลังงาน ![]() เมื่อแกนแม่เหล็กเข้าใกล้หรือเกินจุดคุณสมบัติความต้านทานสูงสุด การสูญเสียพลังงานจะกลายเป็นองค์ประกอบหลักของความต้านทาน ในขณะนี้ การลดทอนเสียงรบกวนจะไม่สามารถทำได้โดยการลดแอมพลิจูดของเสียงรบกวนผ่านความต้านทานแบบเหนี่ยวนำ แต่จะทำโดยการดูดซับพลังงานของเสียงรบกวนผ่านการสูญเสียพลังงานในรูปของความร้อน ดังนั้น ระดับการอิ่มตัวที่เหมาะสม (การอิ่มตัวมากเกินไปจะทำให้ความต้านทานลดลง) จะไม่ส่งผลต่อประสิทธิภาพในการลดทอนเสียงรบกวน ดังนั้นเราจึงไม่จำเป็นต้องค้นหาพารามิเตอร์กระแสอิ่มตัวที่คล้ายกับที่ใช้ในขดลวดกำลัง
เมื่อแกนแม่เหล็กเข้าใกล้หรือเกินจุดคุณสมบัติความต้านทานสูงสุด การสูญเสียพลังงานจะกลายเป็นองค์ประกอบหลักของความต้านทาน ในขณะนี้ การลดทอนเสียงรบกวนจะไม่สามารถทำได้โดยการลดแอมพลิจูดของเสียงรบกวนผ่านความต้านทานแบบเหนี่ยวนำ แต่จะทำโดยการดูดซับพลังงานของเสียงรบกวนผ่านการสูญเสียพลังงานในรูปของความร้อน ดังนั้น ระดับการอิ่มตัวที่เหมาะสม (การอิ่มตัวมากเกินไปจะทำให้ความต้านทานลดลง) จะไม่ส่งผลต่อประสิทธิภาพในการลดทอนเสียงรบกวน ดังนั้นเราจึงไม่จำเป็นต้องค้นหาพารามิเตอร์กระแสอิ่มตัวที่คล้ายกับที่ใช้ในขดลวดกำลัง
เมื่อเลือกอินดักเตอร์โหมดร่วม (Common mode inductors) ในทางกลับกัน หากส่วนของอินดักแตงซ์รั่ว (Leakage inductance) เช่น อินดักแตงซ์ 1 mH มีค่าสัมประสิทธิ์การเหนี่ยวนำ (Coupling coefficient) 99% จะมีอินดักแตงซ์รั่ว 10 uH เกิดขึ้นในวงจรไดเฟอเรนเชียล (Differential circuit) เมื่อพิจารณาถึงการกดดันสัญญาณรบกวนแบบไดเฟอเรนเชียล (Differential mode noise suppression) โดยปกติจะใช้ตัวกรองแบบ LC bridge อินดักแตงซ์รั่วส่วนนี้ก็จำเป็นต้องนำมาคำนวณด้วย อินดักแตงซ์รั่วที่เหมาะสมนั้นมีประโยชน์ในการกดดันสัญญาณรบกวนความถี่สูง แต่เนื่องจากอินดักเตอร์โหมดร่วมโดยหลักใช้แกนแม่เหล็กปิด (Magnetic closed cores) จึงทำให้แกนเกิดภาวะอิ่มตัว (Core saturation) ได้ง่ายเมื่อกระแสไฟฟ้าสูง ซึ่งจะส่งผลต่อประสิทธิภาพการแปลงพลังงานและช่วงความถี่ของตัวกรองเสียงรบกวน การเพิ่มสัดส่วนของอินดักแตงซ์รั่วสามารถทำได้โดยทั่วไปด้วยการใช้โครงสร้างแกนแม่เหล็กแบบสี่เหลี่ยมหรือแบบกรอบ (UU magnetic core หรือ PQ magnetic core เป็นต้น) หรืออาจใช้ขดลวดแบบไม่สมมาตร (Asymmetric windings) ![]() ) การเลือกเฉพาะเจาะจงนั้นจำเป็นต้องให้ผู้ใช้กำหนด โดยการทดสอบระบุตัวแยกโหมดร่วมแบบดิฟเฟอเรนเชียล เพื่อพิจารณาว่ามีความจำเป็นหรือไม่
) การเลือกเฉพาะเจาะจงนั้นจำเป็นต้องให้ผู้ใช้กำหนด โดยการทดสอบระบุตัวแยกโหมดร่วมแบบดิฟเฟอเรนเชียล เพื่อพิจารณาว่ามีความจำเป็นหรือไม่
สำหรับพารามิเตอร์ของความเหนี่ยวนำโหมดร่วมนั้น ส่วนใหญ่ประกอบด้วยค่าความเหนี่ยวนำด้านเดียว, Rdc, กระแสไฟฟ้าที่กำหนด, แรงดันไฟฟ้าที่กำหนด และแรงดันทนแรงดัน (Hi pot) ค่าความเหนี่ยวนำด้านเดียวเป็นตัวกำหนดขนาดของอิมพีแดนซ์โหมดร่วมเป็นหลัก Rdc คือการสูญเสียกระแสตรงของสายไฟ และการเพิ่มขึ้นของอุณหภูมิที่เกิดจากการสูญเสียจะสร้างขีดจำกัดกระแสไฟฟ้าที่กำหนด สุดท้าย เนื่องจากใช้กับสายไฟฟ้าแรงสูง ขีดจำกัดแรงดันไฟฟ้าและข้อกำหนดด้านความปลอดภัยจึงถูกระบุไว้แยกต่างหาก อย่างไรก็ตาม ผู้ใช้มักต้องการประเมินผลการกรอง ดังนั้นโดยทั่วไปแล้ว คู่มือข้อมูลจำเพาะจะมีกราฟลักษณะเฉพาะของอิมพีแดนซ์สองแบบ แบบแรกคืออิมพีแดนซ์โหมดร่วม/โหมดดิฟเฟอเรนเชียลดังแสดงในรูปที่ 9-a และแบบที่สองคืออิมพีแดนซ์การสูญเสียการแทรก dB ดังแสดงในรูปที่ 9-b ทั้งสองมีค่าเท่ากัน และกราฟการสูญเสียการแทรก dB เกิดขึ้นจากการแปลงอิมพีแดนซ์โหมดร่วม/โหมดดิฟเฟอเรนเชียลเป็นระบบที่มีความต้านทาน 50 Ω+50 Ω
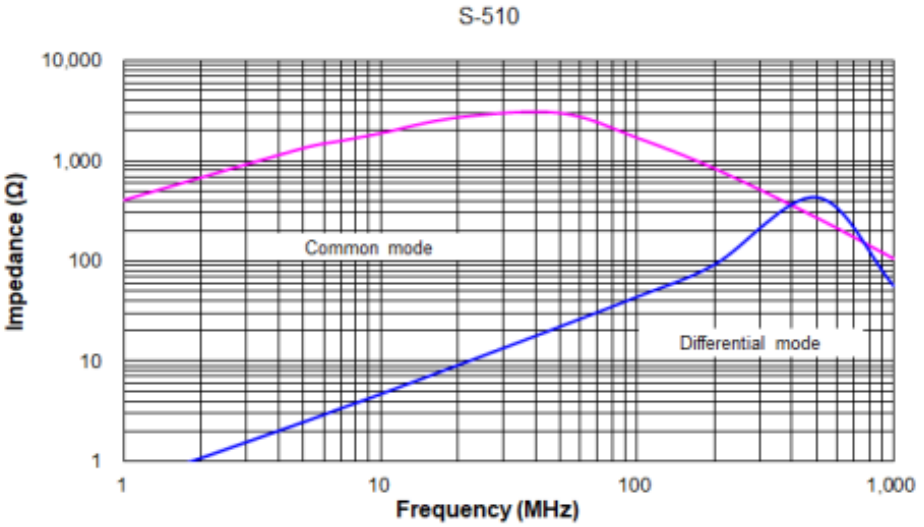
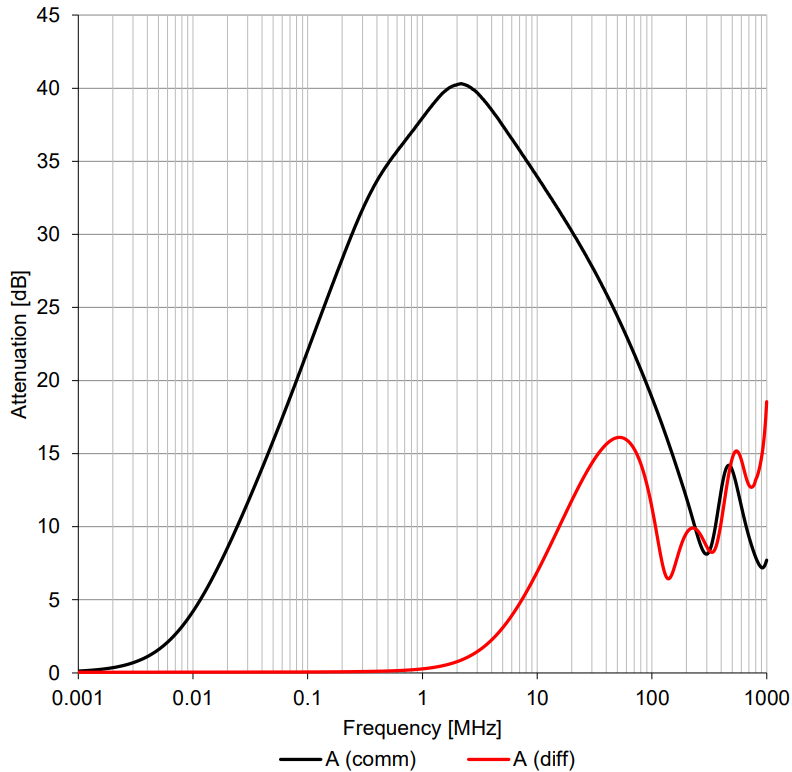
รูปที่ 9 (a) รูปแบบอิมพีแดนซ์โหมดธรรมดา/โหมดเชิงอนุพันธ์ (b) รูปแบบค่าการสูญเสียการแทรก (Insertion loss dB)
สำหรับชุดโหมดธรรมดาเดียวกัน โครงสร้างบรรจุภัณฑ์ขนาดต่างๆ เหมาะสมกับกระแสไฟฟ้าและช่วงความถี่ในการกรองที่แตกต่างกัน: ยิ่งขนาดใหญ่ขึ้นเท่าใด ค่าความต้านทานแม่เหล็กของแกนแม่เหล็กจะยิ่งลดลงมากเท่านั้น ซึ่งจะช่วยลดจำนวนรอบของการพันขดลวด และทำให้สามารถใช้ลวดทองแดงที่มีขนาดเส้นผ่านศูนย์กลางใหญ่ขึ้นได้ เพื่อรองรับวงจรกระแสไฟฟ้าที่ใหญ่ขึ้น นอกจากนี้ หากค่าความเหนี่ยวนำ (inductance) สูงขึ้น หรือความถี่คงที่ต่ำลงของค่าการซึมผ่านแม่เหล็ก (magnetic permeability) ของวัสดุ จะทำให้ช่วงความถี่ในการกรองที่ใช้งานได้มีความกว้างแคบลง โดยตัวเหนี่ยวนำโหมดธรรมดาที่ออกแบบไว้ในวงจรลักษณะนี้ อาจไม่มีประสิทธิภาพในการลดสัญญาณรบกวนที่ปลายความถี่สูง
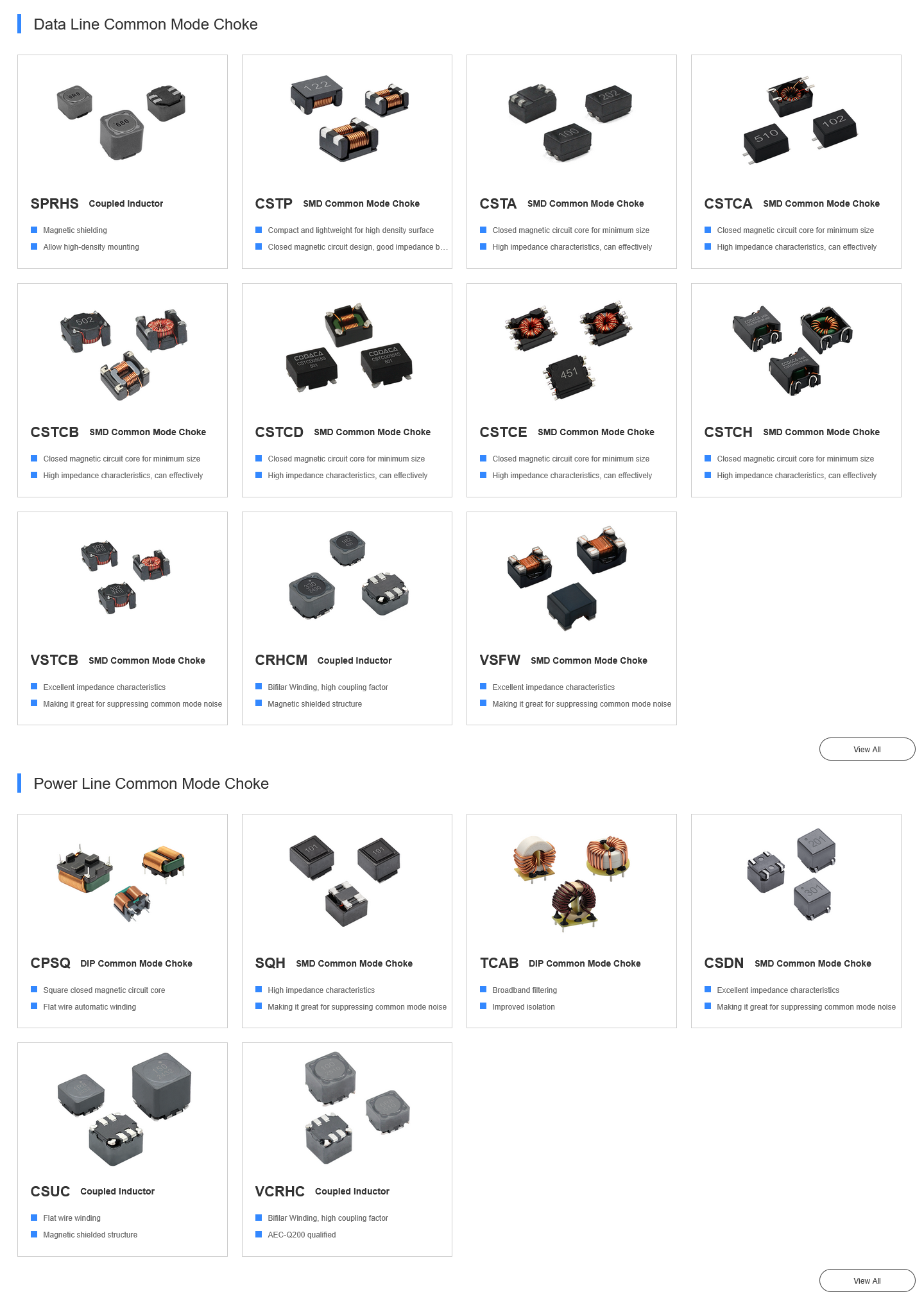
Codaca ตัวเหนี่ยวนำแบบ Common Mode สำหรับอิเล็กทรอนิกส์ในปัจจุบันแบ่งออกเป็นสองส่วนหลัก ได้แก่ สายสัญญาณและสายไฟฟ้า มีมากกว่า 10 ซีรีส์ และบรรจุภัณฑ์ขนาดแตกต่างกัน 50 แบบ รวมทั้งมีหมายเลขชิ้นส่วนมาตรฐานที่แตกต่างกันเกือบ 300 แบบ ใช้กันอย่างแพร่หลายในสายสัญญาณ เช่น CAN BUS, RS485 และอุปกรณ์จ่ายไฟแบบออฟไลน์ที่มีกำลังตั้งแต่ไม่กี่วัตต์จนถึงหลายกิโลวัตต์ นอกจากนี้ ทีมเทคโนโลยีวิจัยและพัฒนาของเรายังสามารถช่วยเหลือผู้ใช้งานตั้งแต่ขั้นตอนการทดสอบ การวิเคราะห์ หรือปรับแต่งให้เหมาะสมตามความต้องการ เพื่อให้ในที่สุดสามารถผ่านการรับรอง EMC ที่เกี่ยวข้องได้
อ้างอิง
[1] Infineon Technologies AG. Engineering_report_DEMO_5QSAG_60W1-AN-v01_00-EN.pdf. www.infineon.com
[2] ข้อมูลผลิตภัณฑ์ตัวเหนี่ยวนำ CODACA: www.codaca.com
[3] Clayton R.Paul การแนะนำความเข้ากันได้ทางแม่เหล็กไฟฟ้า พิมพ์ครั้งที่ 2 Wiley-interscience.
[4] Bhag Singh Guru และ Huseyin R. Hiziroglu พื้นฐานทฤษฎีสนามแม่เหล็กไฟฟ้า พิมพ์ครั้งที่ 2 Cambridge University Press.
คำอธิบายเกี่ยวกับการคุ้มครองทรัพย์สินทางปัญญา
CODACA "หรือ" Codaca "เป็นเครื่องหมายการค้าจดทะเบียนของบริษัท เซินเจิ้นโคดาก้า อิเล็กทรอนิกส์ จำกัด การใช้หรือการอ้างอิงข้อความ ข้อมูล หรือประเภทอื่น ๆ ของข้อมูลสาธารณะที่มีเนื้อหาเกี่ยวกับทรัพย์สินทางปัญญาที่เผยแพร่หรือแจกจ่ายโดยบริษัท เซินเจิ้นโคดาก้า อิเล็กทรอนิกส์ จำกัด ถือว่าอยู่ในขอบเขตการคุ้มครองทรัพย์สินทางปัญญาของบริษัท เซินเจิ้นโคดาก้า อิเล็กทรอนิกส์ จำกัด บริษัท เซินเจิ้นโคดาก้า อิเล็กทรอนิกส์ จำกัด ขอสงวนสิทธิ์ในการประกาศทรัพย์สินทางปัญญา การคุ้มครองสิทธิ์ และสิทธิ์อื่น ๆ ที่เกี่ยวข้อง เพื่อให้ชัดเจนว่าคุณจะไม่เกิดข้อขัดแย้งทางทรัพย์สินทางปัญญาที่อาจเกิดขึ้นในเรื่องที่เกี่ยวข้อง กรุณาติดต่อบริษัท เซินเจิ้น เคต้าเจีย อิเล็กทรอนิกส์ จำกัด หากจำเป็น