
Quick Links

ໜຶ່ງໃນຮູບແບບທີ່ພົບຫຼາຍທີ່ສຸດຂອງອົງປະກອບແມ່ເຫຼັກຄືຄວາມອິນດັກຕິວ (inductance) ທີ່ມີຄ່າຄວາມອິນດັກຕິວແນ່ນອນ ແລະ ສາເຫດທີ່ເຮັດໃຫ້ຄວາມຕ້ານຢູ່ເພີ່ມຂື້ນຕາມຄວາມຖີ່. ສິ່ງນີ້ດຽວກໍສາມາດຖືໄດ້ວ່າເປັນຕົວກັ້ນຄວາມຖີ່ສູງຊັ້ນທຳອິດ; ເມື່ອວັດຖຸທີ່ຕ້ອງກັ້ນຄວາມຖີ່ທີ່ເຮົາກຳລັງເວົ້າຢູ່ນັ້ນ ປ່ຽນຈາກເສັ້ນທາງກະແສໄຟຟ້າດຽວ (loop ຫຼື circuit loop) ໄປເປັນສອງເສັ້ນທາງ ຫຼື ຫຼາຍກວ່ານັ້ນ, ມັນຈຳເປັນຕ້ອງວາງອິນດັກໂຕຣນິກຢ່າງໜ້ອຍໜຶ່ງຕົວໃນແຕ່ລະເສັ້ນທາງເພື່ອໃຫ້ໄດ້ຜົນກັ້ນຄວາມຖີ່ສູງຄືກັນ - ສິ່ງນີ້ສາມາດອອກແບບໄດ້ຢ່າງງ່າຍດາຍ ແລະ ຢ່າງສະຫຼາດໃນອົງປະກອບແມ່ເຫຼັກໃນການປະຕິບັດ, ຊຶ່ງກໍຄື common mode choke ທີ່ເຮົາກຳລັງເວົ້າເຖິງຢູ່ນີ້. ເປັນຫຍັງ? ເນື່ອງຈາກເມື່ອມີຫຼາຍເສັ້ນທາງ (ເຊັ່ນ: ສອງເສັ້ນທາງທີ່ພົບຫຼາຍທີ່ສຸດ), ລັງສີແມ່ເຫຼັກທີ່ເກີດຈາກກະແສໄຟຟ້າທິດທາງດຽວກັນສາມາດແບ່ງປັນໃຫ້ກັບເສັ້ນທາງກະແສໄຟຟ້າອີກເສັ້ນໜຶ່ງໄດ້, ເຮັດໃຫ້ມັນເທົ່າກັບການໄດ້ຮັບຄວາມຕ້ານທີ່ເພີ່ມຂື້ນ ເຊິ່ງເອີ້ນວ່າ (magnetic) coupling. ດັ່ງນັ້ນ, ໂດຍການພັນລວງຂອງຂດ້ານໃນການເຊື່ອມໂຍງກັນອ້ອມໃນຫົວໃຈແມ່ເຫຼັກ, ສາມາດບັນລຸຜົນກັ້ນໄດ້ດີກ່ວາການໃຊ້ອິນດັກໂຕຣນິກສອງຕົວແຍກກັນ.
ຂ້າງເທິງນີ້ໄດ້ແນະນຳລັກສະນະພື້ນຖານຂອງຕົວຊັກນຳຮູບແບບທົ່ວໄປ, ກໍຄືການກັ່ນຕອງ. ດັ່ງນັ້ນ, ກ່ອນອື່ນໝົດ, ມັນເປັນສິ່ງຈຳເປັນທີ່ຈະຕ້ອງແຍກແຍ່ລະຫວ່າງໂຕເຄື່ອງແປງໄຟຟ້າ (transformers) ແລະ ຕົວຊັກນຳຮູບແບບທົ່ວໄປທີ່ຕ້ອງການການເຊື່ອມຕໍ່ (coupling operation), ເນື່ອງຈາກການກັ່ນຕອງຈະກຳຈັດ (ຫຼື ສັບຊຶມ) ສຽງລົບກວນໃນເສັ້ນທາງ. ຈາກທິດທາງການຂັບເຄື່ອນ (excitation direction), ມັນເປັນຮູບແບບທົ່ວໄປ, ແຕ່ໂຕເຄື່ອງແປງໄຟຟ້າຈະຖ່າຍໂອນກະແສໄຟຟ້າທີ່ເປັນຕົວແທນຂອງພະລັງງານ, ຊຶ່ງເປັນຮູບແບບຄວາມແຕກຕ່າງ (differential mode). ດັ່ງນັ້ນ, ຄືກັບການເຊື່ອມຕໍ່ຂອງຕົວເກັບໄຟຟ້າຄວາມປອດໄພ (safety capacitors), ຕົວຊັກນຳຮູບແບບທົ່ວໄປຈະຕ້ອງຢູ່ໃນການເຊື່ອມຕໍ່ Y (ຜ່ານວົງຈອນດິນ ຫຼື ວົງຈອນອ້າງອີງ), ໃນຂະນະທີ່ໂຕເຄື່ອງແປງໄຟຟ້າຈະຕ້ອງຢູ່ໃນການເຊື່ອມຕໍ່ X (ຂ້າມວົງຈອນເຂົ້າ ແລະ ອອກ). ສອງ, ການປະເມີນຜົນ ແລະ ການວັດແທກຜົນກັ່ນຕອງຮູບແບບທົ່ວໄປຂອງມັນເອງຈະຕ້ອງໃຊ້ວົງຈອນຊ່ວຍເສີມເພີ່ມເຕີມ. ແຕ່ໃນການທົດສອບ EMC (Electromagnetic Compatibility) ທີ່ເກີດຂຶ້ນຈິງ, ມັນມັກຈະທົດສອບພຽງແຕ່ສັນຍານຂອງຕົວຮັບ (LISN - Linear Impedance Stabilization Network) ທີ່ເກີດຈາກການປະສົມປະສານກັນລະຫວ່າງຮູບແບບຄວາມແຕກຕ່າງ ແລະ ຮູບແບບທົ່ວໄປເພື່ອກຳນົດວ່າມັນສອດຄ່ອງກັບມາດຕະຖານກົດລະບຽບທີ່ກ່ຽວຂ້ອງ (ເຊັ່ນ: ການຢັ້ງຢືນ CE) ຫຼືບໍ່. ດັ່ງນັ້ນ, ບົດບາດຂອງຕົວຊັກນຳຮູບແບບທົ່ວໄປມັກຈະຫາຄຳຕອບໃນປື້ມແຈ້ງຂໍ້ມູນບໍ່ໄດ້, ນີ້ກໍເປັນເຫດຜົນທີ່ວິສະວະກອນມັກອີງໃສ່ປະສົບການເພື່ອຄາດຄະເນຜົນການຈຳລອງເມື່ອເລືອກຮຸ່ນ. ສຸດທ້າຍ, ຜູ້ອ່ານທີ່ສັງເກດລະອຽດຈະພົບວ່າຕົວຊັກນຳຮູບແບບທົ່ວໄປຖືກເອີ້ນວ່າຕົວຊັກນຳ, ແຕ່ມັນບໍ່ແຕກຕ່າງຈາກຕົວຊັກນຳພະລັງງານ. ພວກມັນບໍ່ໄດ້ຄິດເຖິງກະແສສັນຍາລັກ (saturation current) ຫຼື ການເກັບຮັກສາພະລັງງານ, ແລະ ຊື່ພາສາອັງກິດຂອງພວກມັນຈົບດ້ວຍ choke. ດັ່ງນັ້ນ, ຄວາມໝາຍພື້ນຖານຂອງພວກມັນຍັງຄົງເປັນ choke. ດັ່ງທີ່ພວກເຮົາຈະອະພິປາຍໃນອະນາຄົດ, ກໍເນື່ອງຈາກຜົນກະທົບ choke ຂອງພວກມັນເອງທີ່ເຮັດໃຫ້ພວກມັນສາມາດບັນລຸການກັ່ນຕອງໄດ້, ສະນັ້ນການເອີ້ນພວກມັນວ່າຕົວຊັກນຳຮູບແບບທົ່ວໄປ (common mode choke coils) ຈຶ່ງສອດຄ່ອງກັບຫຼັກການຂອງພວກມັນຫຼາຍຂຶ້ນ.
ໃນພາກຕໍ່ໄປນີ້, ພວກເຮົາຈະໄດ້ຮຽນຮູ້ກ່ຽວກັບຫຼັກການພື້ນຖານຂອງໂຄງສ້າງ, ການຈັດປະເພດການນຳໃຊ້, ແລະ ການເລືອກທາງເລືອກຂອງອຸປະກອນ inductors ທີ່ໃຊ້ທົ່ວໄປ, ເຊິ່ງຫວັງວ່າຈະເປັນປະໂຫຍດຕໍ່ທ່ານໃນຖານະວິສະວະກອນ. ໃນຂະນະດຽວກັນ, ຖ້າທ່ານມີຄຳຖາມຫຼື ຕ້ອງການປຶກສາຫາລືຂໍ້ມູນທີ່ກ່ຽວຂ້ອງ, ກະລຸນາຕິດຕໍ່ພວກເຮົາ. ທີມວິສະວະກອນຂອງພວກເຮົາຈະສະໜອງການຊ່ວຍເຫຼືອໃຫ້ທ່ານຫຼາຍເທົ່າທີ່ເປັນໄປໄດ້ໃນແງ່ຂອງອຸປະກອນ ແລະ ການນຳໃຊ້.
1- ການເຊື່ອມຕໍ່ສະພາບແວດລ້ອມແມ່ເຫຼັກ
ດັ່ງທີ່ສະແດງໃນຮູບທີ 1, ໂຄງສາຍ A ທີ່ໄດ້ຮັບການສະໜອງພະລັງງານຈະແຈກຢາຍສາຍພູມໃນອະວະກາດໃກ້ກັບວົງຈອນປັດຈຸບັນຂອງມັນ (ໃນທີ່ນີ້ແມ່ນໂຄງສາຍ), ສະແດງຜົນໂດຍສາຍພູມ Φa (ຫຼື → Ba) ການຈັດປະເພດການນຳໃຊ້ ແລະ ການເລືອກຄວາມໜາແໜ້ນຂອງສາຍພູມຂອງອຸປະກອນ inductance ທີ່ໃຊ້ທົ່ວໄປ). ຄວາມເຂັ້ມຂອງສາຍພູມຂຶ້ນຢູ່ກັບຂະໜາດຂອງກະແສໄຟຟ້າ, ຈຳນວນເທື່ອງອ້ຽວຂອງໂຄງສາຍ, ເນື້ອທີ່ພື້ນທີ່ຕັດທີ່ມີປະສິດທິຜົນ, ແລະ ວ່າມີຫຼືບໍ່ມີຫຼັກສາຍພູມ. ສາຍພູມໃນກາງໂຄງສາຍສາມາດສະແດງໄດ້ໂດຍປະມານດັ່ງນີ້:

ພາຍໃນນັ້ນ, ຖ້າມີແກນໂລຫະທີ່ເປັນແມ່ເຫຼັກຢູ່ສູນກາງຂອງຂດໄກວຽນ, ຄວາມອ່ອນຕົວຂອງແມ່ເຫຼັກ  ຍິ່ງໃຫຍ່ຂຶ້ນ, ຍ່າວຂອງວົງຈອນແມ່ເຫຼັກທີ່ເທົ່າທຽມກັນ
ຍິ່ງໃຫຍ່ຂຶ້ນ, ຍ່າວຂອງວົງຈອນແມ່ເຫຼັກທີ່ເທົ່າທຽມກັນ  ຍິ່ງສັ້ນລົງ, ລາຍໄດ້ແມ່ເຫຼັກກໍຍິ່ງໃຫຍ່ຂຶ້ນ. ນີ້ແມ່ນຮູບແບບມາດຕະຖານຂອງຂດໄກວຽນ (inductance) ແລະ ການແຈກຢາຍຂອງລາຍໄດ້ແມ່ເຫຼັກໃນອະວະກາດທີ່ກ່ຽວຂ້ອງ. ສິ່ງທີ່ຄວນສັງເກດແມ່ນວ່າການແຈກຢາຍຂອງລາຍໄດ້ແມ່ເຫຼັກນັ້ນບໍ່ຂຶ້ນກັບການປ່ຽນແປງຂອງກະແສໄຟຟ້າ ແລະ ເປັນຄວາມສຳພັນທີ່ເທົ່າທຽມກັນ. ທຳມະຊາດຂອງມັນແມ່ນມາຈາກກົດລະບຽບຂອງການສະຫຼຽງແມ່ເຫຼັກຂອງເກົາສ (Gaussian magnetic field law) ໃນກົດລະບຽບໄຟຟ້າແມ່ເຫຼັກຂອງເມັກສເວລ (Maxwell's electromagnetic equations).
ຍິ່ງສັ້ນລົງ, ລາຍໄດ້ແມ່ເຫຼັກກໍຍິ່ງໃຫຍ່ຂຶ້ນ. ນີ້ແມ່ນຮູບແບບມາດຕະຖານຂອງຂດໄກວຽນ (inductance) ແລະ ການແຈກຢາຍຂອງລາຍໄດ້ແມ່ເຫຼັກໃນອະວະກາດທີ່ກ່ຽວຂ້ອງ. ສິ່ງທີ່ຄວນສັງເກດແມ່ນວ່າການແຈກຢາຍຂອງລາຍໄດ້ແມ່ເຫຼັກນັ້ນບໍ່ຂຶ້ນກັບການປ່ຽນແປງຂອງກະແສໄຟຟ້າ ແລະ ເປັນຄວາມສຳພັນທີ່ເທົ່າທຽມກັນ. ທຳມະຊາດຂອງມັນແມ່ນມາຈາກກົດລະບຽບຂອງການສະຫຼຽງແມ່ເຫຼັກຂອງເກົາສ (Gaussian magnetic field law) ໃນກົດລະບຽບໄຟຟ້າແມ່ເຫຼັກຂອງເມັກສເວລ (Maxwell's electromagnetic equations).
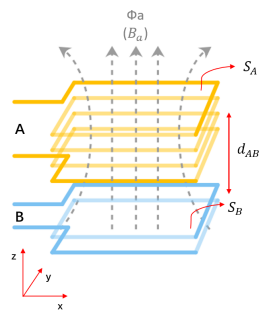
ຮູບ.1 ການແຈກຢາຍຂອງສະພາແມ່ເຫຼັກໃນອະວະກາດຂອງຂດໄກວຽນ A ແລະ B
ເມື່ອຂດໃນອີກໜຶ່ງ B ໃນອະວະກາດເຂົ້າໃກ້ຂດ A ທີ່ໄດ້ຮັບພະລັງງານໃນທາງສາຍພົວພັນບາງຢ່າງ (ເຊັ່ນທີ່ສະແດງໃນຮູບ.1) ລົມເຄື່ອນທີ່ແຜ່ກະຈາຍໂດຍຂດ A ຈະຕ້ອງຜ່ານຂດ B ສ້າງເປັນຄວາມສຳພັນຮ່ວມກັນ. ຕາມກົດໝາຍຂອງ Ampere ເມື່ອລົມເຄື່ອນໃນວົງຈອນທີ່ຖືກປິດໂດຍຂດ B ແປປວນ ພະລັງງານໄຟຟ້າທີ່ຖືກຊັກນຳ ຫຼື ແຮງດັນໄຟຟ້າທີ່ຖືກຊັກນຳຈະຖືກຜະລິດຂຶ້ນໃນວົງຈອນຂອງຂດ B. ມັນສາມາດຄາດຄະເນໄດ້ວ່າ ຖ້າຂດ B ແມ່ນຂດຕົວນຳທີ່ເປີດ ບໍ່ສາມາດສ້າງວົງຈອນໄຟຟ້າໄດ້ ແຕ່ພຽງແຕ່ສ້າງແຮງດັນໄຟຟ້າທີ່ຖືກຊັກນຳຢູ່ທັງສອງຂອງຂດ B. ເນື່ອງຈາກບໍ່ມີໄຟຟ້າໃນວົງຈອນຂອງມັນ ດັ່ງນັ້ນຈະບໍ່ມີສະພາບແວດລ້ອມຂອງລົມເຄື່ອນໃນອະວະກາດທີ່ສອດຄ້ອງກັນ; ຢ່າງໃດກໍຕາມ ຖ້າຂດ B ແມ່ນວົງຈອນປິດ ຈະຕ້ອງມີໄຟຟ້າວົງຈອນເກີດຂຶ້ນ ເຊິ່ງກໍຄືໄຟຟ້າທີ່ຖືກຊັກນຳ. ໃນຂະນະດຽວ ເນື່ອງຈາກມີໄຟຟ້າທີ່ຖືກຊັກນຳ ມັນຈະສ້າງການແຜ່ກະຈາຍຂອງລົມເຄື່ອນໃນທາງກົງກັນຂ້າມໃນອະວະກາດ. ຕາມຄວາມສຳພັນໃນອະວະກາດລະຫວ່າງຂດ B ແລະ ຂດ A ຂດ A ຈະແບ່ງປັນການແຜ່ກະຈາຍຂອງລົມເຄື່ອນຂອງຂດ B. ສະນັ້ນ ຜົນໄດ້ຮັບສຸດທ້າຍຂອງການຊັກນຳເຊິ່ງກັນແລະກັນຈະເປັນຫຍັງ? ແນ່ນອນ ຖ້າຂດ A ມີພຽງແຕ່ໄຟຟ້າຄົງທີ່ ຂດ B ຈະບໍ່ຮູ້ສຶກເຖິງການແປປວນຂອງລົມເຄື່ອນທີ່ແບ່ງປັນຢູ່ໃນຕຳແໜ່ງຖາວອນ. ສະນັ້ນ ພຽງແຕ່ເມື່ອໄຟຟ້າທີ່ປ່ຽນແປງ (ເຊັ່ນໄຟຟ້າຄື່ນ) ໄດ້ຖືກຜະລິດໃນຂດ A ການຊັກນຳເຊິ່ງກັນແລະກັນຈຶ່ງສາມາດເກີດຂຶ້ນໄດ້. ໃນສະຖານະການ 1 ຕໍ່ 1 (ພຽງແຕ່ເບິ່ງສະຖານະການທີ່ຂດໜຶ່ງຖືກຈັບຄູ່ກັບຂດອີກອັນໜຶ່ງ) ໄຟຟ້າທີ່ຖືກຊັກນຳສະເໝີມີຜົນກະທົບຕໍ່ການຕ້ານການແປປວນຂອງລົມເຄື່ອນ. ສະນັ້ນ ຜົນກະທົບຂອງຂດ B ຕໍ່ຂດ A ຈະພຽງແຕ່ຍົກເລີກການແປປວນຂອງລົມເຄື່ອນທີ່ແບ່ງປັນໂດຍຂດ A ກັບຂດ B. ລົມເຄື່ອນທີ່ແບ່ງປັນໂດຍສອງຂດນີ້ຈະຍົກເລີກກັນໃນແງ່ຂອງການແປປວນ.
ການເຊື່ອມໂຍງສະພາແຮງດູດໃນຕຳແໜ່ງຖາວອນ (ຕ່າງຈາກເຄື່ອງຈັກໄຟຟ້າ ຫຼື ເຄື່ອງກຳເນີດໄຟຟ້າ) ອະທິບາຍການປະຕິກິລິຍາລະຫວ່າງຂດໄກຕ່າງໆ ຍ້ອນການແບ່ງປັນສາຍແຮງດູດພາຍໃຕ້ສະພາບການໄຟຟ້າປ່ຽນແປງ. ເປັນຕົວປ່ຽນແປງພະລັງງານ ຫຼື ສຳລັບການກັ້ນສັນຍານ, ຫຼື ເປັນຕົວນຳໄຟຟ້າໃນຮູບແບບຄູ່ (common mode inductor) ສຳລັບການຊົດເຊີຍກະແສໄຟຟ້າ, ມັນເປັນຕົວຢ່າງໜຶ່ງຂອງການເຊື່ອມໂຍງສະພາແຮງດູດ. ໃນຂະນະທີ່ອອກແບບ ຫຼື ຜະລິດຕົວນຳໄຟຟ້າໃນຮູບແບບຄູ່ (common mode inductor), ພວກເຮົາບໍ່ສາມາດຫຼີກລ່ຽງຄຳຖາມໜຶ່ງໄດ້: ພາລາມິເຕີໃດແດ່ທີ່ຂດໄກສອງອັນຈະຕ້ອງຮັບປະກັນເພື່ອໃຫ້ຕອບສະໜອງຄວາມຕ້ອງການ? ຫຼື ທັງກະແສໄຟຟ້າ ແລະ ລັກສະນະຂອງຂດໄກດ້ານໜຶ່ງ, ມີຄວາມຕ້ອງການໃດແດ່ທີ່ຈຳເປັນຕ້ອງພິຈາລະນາກ່ຽວກັບຄວາມສຳພັນລະຫວ່າງຂດໄກສອງອັນນັ້ນ? ຄວາມຕ້ອງການດ້ານພາລາມິເຕີທົ່ວໄປແມ່ນຄວາມຜິດພາດໃນການຮັບຮູ້ຂອງຂດໄກທັງສອງຕ້ອງນ້ອຍພຽງພໍ, ຫຼື ບາງຄັ້ງຄວາມເຊື່ອມໂຍງ (coupling coefficient) ຕ້ອງບັນລຸລະດັບສູງ (ເຊັ່ນ 98%). ນີ້ແມ່ນຍ້ອນວ່າເປັນຕົວນຳໄຟຟ້າໃນຮູບແບບຄູ່ (common mode inductor) ປະເພດການຊົດເຊີຍກະແສໄຟຟ້າ, ຖ້າການນຳໄຟຟ້າທີ່ຮົ່ວໄຫຼ (leakage inductance) ແມ່ນໃຫຍ່ເກີນໄປ, ມັນຈະມີຜົນກະທົບຢ່າງຫຼວງຫຼາຍຕໍ່ສັນຍານໃນຮູບແບບຄູ່ຕ່າງໆ (differential mode signal), ເຊິ່ງອາດຈະເຮັດໃຫ້ເກີດຄວາມຕ້ານທານໃນຮູບແບບຄູ່ຕ່າງໆ (differential mode impedance) ທີ່ບໍ່ຈຳເປັນ (ເຮັດໃຫ້ສັນຍານອ່ອນລົງ ຫຼື ກວ້າງຂອງຄວາມຖີ່ໃນຮູບແບບຄູ່ຕ່າງໆຫຼຸດລົງ), ຫຼື ເຮັດໃຫ້ຫົວໃຈແມ່ເຫຼັກ (magnetic core) ເກີດການອິ່ມຕົວ (saturation) ແລະ ສົ່ງຜົນກະທົບຕໍ່ການກັ້ນສຽງໃນຮູບແບບຄູ່ (common mode noise suppression). ດັ່ງນັ້ນ, ຈຶ່ງຈຳເປັນຕ້ອງຄວບຄຸມຄວາມເຊື່ອມໂຍງຂອງການເຊື່ອມໂຍງສະພາແຮງດູດ.
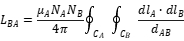
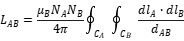
ເມື່ອການເຊື່ອມຕໍ່ຂອງສະພາແຮງດູດເກີດຂື້ນລະຫວ່າງຂດໄກສອງອັນຜ່ານສື່ກາງ (ຫຼັກແມ່ເຫຼັກ) ດ້ວຍຄວາມເຂັ້ມຂົ້ນຂອງແຮງດູດທີ່ສະເໝີ, ແຮງດູດທີ່ແບ່ງປັນກັນທີ່ກຳນົດໄວ້ຈາກຂດ A ໄປຂດ B ແມ່ນ  ໃນທາງກົງກັນຂ້າມ, ມັນເທົ່າກັບ
ໃນທາງກົງກັນຂ້າມ, ມັນເທົ່າກັບ  . ຫຼັງຈາກນັ້ນ, ເນື່ອງຈາກແຮງດູດທີ່ແບ່ງປັນກັນ (ການເຊື່ອມຕໍ່ຂອງສະພາແຮງດູດ) ສອດຄ້ອງກັບການນຳໄຟຟ້າຮ່ວມກັນ, ສາມາດຖືກກຳນົດເປັນການຈັດປະເພດແລະການເລືອກໃຊ້ຕົວກັນສຽງທົ່ວໄປ ແລະ ການຈັດປະເພດແລະການເລືອກໃຊ້ຕົວກັນສຽງທົ່ວໄປຕາມລຳດັບ
. ຫຼັງຈາກນັ້ນ, ເນື່ອງຈາກແຮງດູດທີ່ແບ່ງປັນກັນ (ການເຊື່ອມຕໍ່ຂອງສະພາແຮງດູດ) ສອດຄ້ອງກັບການນຳໄຟຟ້າຮ່ວມກັນ, ສາມາດຖືກກຳນົດເປັນການຈັດປະເພດແລະການເລືອກໃຊ້ຕົວກັນສຽງທົ່ວໄປ ແລະ ການຈັດປະເພດແລະການເລືອກໃຊ້ຕົວກັນສຽງທົ່ວໄປຕາມລຳດັບ  ແລະ
ແລະ  :
:


ແຮງດູດທີ່ແບ່ງປັນກັນທັງໝົດທີ່ປາຍຂອງຂດກະຕຸ້ນຍັງເອີ້ນວ່າການເຊື່ອມໂຍງ (linkage,  ) ສາມາດສະແດງອອກໄດ້ໂດຍຄວາມສຳພັນ
) ສາມາດສະແດງອອກໄດ້ໂດຍຄວາມສຳພັນ  ລະຫວ່າງພື້ນຖານຂອງຄວາມເຂັ້ມຂົ້ນຂອງແຮງດູດ
ລະຫວ່າງພື້ນຖານຂອງຄວາມເຂັ້ມຂົ້ນຂອງແຮງດູດ  ແລະ ແຮງດູດແບບເປັນຕົວແປ
ແລະ ແຮງດູດແບບເປັນຕົວແປ  ຕຳແໜ່ງ:
ຕຳແໜ່ງ:

ຕຳແໜ່ງຂອງແຮງດູດແບບເປັນຕົວແປທີ່ແຈກຢາຍໂດຍຂດ A ໃນແຕ່ລະຈຸດຂອງຂດ B ແມ່ນ (ໃນກໍລະນີກາງຂອງການນຳໃຊ້ການຈັດປະເພດ ແລະ ການເລືອກທີ່ມີຄວາມຫ່າງຈາກກາງໃຈຫາກາງໃຈ  ຂອງຕົວກັນສຽງທົ່ວໄປ):
ຂອງຕົວກັນສຽງທົ່ວໄປ):
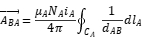
ການເຊື່ອມໂຍງແຮງດັນໄຟຟ້າລະຫວ່າງຂດໄກ່ A ແລະ ຂດໄກ່ B ສາມາດຄິດໄດ້ດັ່ງນີ້:

ດັ່ງນັ້ນ, ການເຊື່ອມໂຍງແຮງດັນໄຟຟ້າຕໍ່ກັນ  ທີ່ສົ່ງຜົນຕໍ່ຂດໄກ່ A ໂດຍຂດໄກ່ B ມີດັ່ງນີ້:
ທີ່ສົ່ງຜົນຕໍ່ຂດໄກ່ A ໂດຍຂດໄກ່ B ມີດັ່ງນີ້:
ຫຼັກການດຽວກັນສາມາດນຳໃຊ້ເພື່ອຄິດໄລ່ຫາ  ສູດສຳລັບ:
ສູດສຳລັບ:
ດັ່ງທີ່ໄດ້ກ່າວມາກ່ອນໜ້ານີ້, ການເຊື່ອມໂຍງສະພາບແວດລ້ອມແມ່ນເກີດຂຶ້ນລະຫວ່າງຂດໄກ່ສອງອັນ ຜ່ານສື່ກາງ (ຫຼັກແມ່ນເຫຼັກ) ທີ່ມີຄວາມອາດສາມາດໃນການດູດຊຶມແມ່ນເໝາະສົມ. ດັ່ງນັ້ນ  , ຊັດເຈນ:
, ຊັດເຈນ:

ຄຳອະທິບາຍຂ້າງເທິງໄດ້ກ່າວເຖິງວ່າ ຂດໄກ່ສອງອັນທີ່ຖືກພັນຢູ່ເທິງຫຼັກແມ່ນເຫຼັກດຽວກັນ ຈະມີການເຊື່ອມໂຍງແຮງດັນໄຟຟ້າຕໍ່ກັນເທົ່າກັນ ເຊິ່ງສະແດງດ້ວຍ M. ຂະບວນການພິສູດລາຍລະອຽດຂ້າງເທິງສາມາດເບິ່ງໄດ້ໃນສູດ Neumann. ດຽວນີ້, ຖ້າຫາກວ່າແຮງດັນໄຟຟ້າທັງໝົດ  ຂອງຂດໄກ່ A ແມ່ນສ່ວນຮ່ວມກັນ
ຂອງຂດໄກ່ A ແມ່ນສ່ວນຮ່ວມກັນ  ສ່ວນແບ່ງຂອງ
ສ່ວນແບ່ງຂອງ  , ນັ້ນແມ່ນ
, ນັ້ນແມ່ນ  . ດັ່ງນັ້ນ, ສຳເລັດຮ່ວມກັນຂອງຂດລວງ B ແມ່ນຄວາມສຳພັນດັ່ງຕໍ່ໄປນີ້:
. ດັ່ງນັ້ນ, ສຳເລັດຮ່ວມກັນຂອງຂດລວງ B ແມ່ນຄວາມສຳພັນດັ່ງຕໍ່ໄປນີ້:  , ຈະມີ:
, ຈະມີ:

ດັ່ງນັ້ນ, ຄວາມສຳພັນລະຫວ່າງການຊົນກັນຂອງຂດລວງສອງອັນກັບການຊົນກັນຢ່າງເດັດຂາດສາມາດໄດ້ຮັບຈາກຄວາມສຳພັນຂອງສົມຜົນຂ້າງເທິງ:

ຂ້າງເທິງນີ້ແມ່ນຕົ້ນກຳເນີດຂອງສຳເລັດການເຊື່ອມໂຍງຂອງສາຍແຮງໄຟຟ້າ k: ຄ່າການຊົນກັນຂອງສາຍແຮງໄຟຟ້າສາມາດຖືກກຳນົດໂດຍການວັດແທກຄ່າການຊົນກັນຂອງຂດລວງສອງອັນຢ່າງເດັດຂາດ (ຂດລວງອີກອັນໜຶ່ງຍັງຄົງຢູ່ໃນສະຖານະການເປີດ)  , ພ້ອມກັນນັ້ນກໍຄືຄ່າການຊົນກັນແລະສຳເລັດການເຊື່ອມໂຍງ k. ລະອຽດແລ້ວ, ສຳລັບຕົວຊົນກັນຂອງສາຍແຮງໄຟຟ້າທີ່ມີຄວາມສົມດຸນສູງທີ່ຖືກພັນຢູ່ໃນຫຼັກເຫຼັກທີ່ມີຄວາມເຂັ້ມຂຸ້ນສູງ (ເຊັ່ນວ່າວົງແຫຼ່ນ Ferrite MnZn), ຄ່າການຊົນກັນຂອງຂດລວງສອງອັນຈະມີຄວາມໃກ້ຄຽງກັນຫຼາຍ, ແລະຄ່າຂອງການຊົນກັນແມ່ນຈະໃກ້ຄຽງກັບ
, ພ້ອມກັນນັ້ນກໍຄືຄ່າການຊົນກັນແລະສຳເລັດການເຊື່ອມໂຍງ k. ລະອຽດແລ້ວ, ສຳລັບຕົວຊົນກັນຂອງສາຍແຮງໄຟຟ້າທີ່ມີຄວາມສົມດຸນສູງທີ່ຖືກພັນຢູ່ໃນຫຼັກເຫຼັກທີ່ມີຄວາມເຂັ້ມຂຸ້ນສູງ (ເຊັ່ນວ່າວົງແຫຼ່ນ Ferrite MnZn), ຄ່າການຊົນກັນຂອງຂດລວງສອງອັນຈະມີຄວາມໃກ້ຄຽງກັນຫຼາຍ, ແລະຄ່າຂອງການຊົນກັນແມ່ນຈະໃກ້ຄຽງກັບ  . ສາມາດເຫັນໄດ້ວ່າ ສຳເລັດການເຊື່ອມໂຍງຍິ່ງສູງຂຶ້ນ, ການຊົນກັນແບບຮົ່ວລົ້ນກໍຍິ່ງຕ່ຳລົງ.
. ສາມາດເຫັນໄດ້ວ່າ ສຳເລັດການເຊື່ອມໂຍງຍິ່ງສູງຂຶ້ນ, ການຊົນກັນແບບຮົ່ວລົ້ນກໍຍິ່ງຕ່ຳລົງ.
2- ການນຳໃຊ້ຕົວເຊື່ອມຕໍ່ສາກສົມທົບ
ດັ່ງທີ່ໄດ້ກ່າວມາໃນຕອນເລີ່ມຕົ້ນຂອງບົດຄວາມນີ້, ຕົວລວດໄຟຟ້າສາມັນ (common mode inductor) ກໍ່ຄືຕົວລວດໄຟຟ້າທີ່ເຊື່ອມຕໍ່ຜ່ານວົງຈອນໄຟຟ້າສອງເສັ້ນພ້ອມກັນ. ໜ້າທີ່ຂອງມັນແມ່ນເພື່ອປິດກັ້ນ ຫຼື ຫຼຸດທອນສຽງລົບກວນແບບສາມັນ (common mode noise) ທີ່ອາດຈະມີຢູ່ໃນວົງຈອນໄຟຟ້າທັງສອງເສັ້ນ. ຢ່າງໃດກໍຕາມ, ວົງຈອນໄຟຟ້າສອງເສັ້ນທີ່ເຊື່ອມຕໍ່ກັນນີ້ບໍ່ໄດ້ຖືກຈຳກັດພຽງແຕ່ໃນກໍລະນີທີ່ເຮັດໃຫ້ເກີດວົງຈອນຄວາມແຕກຕ່າງ (differential circuit), ຍົກຕົວຢ່າງເສັ້ນ L ແລະ N ໃນຄູ່ຂອງສາຍສົ່ງໄຟຟ້າ, ຫຼື ເສັ້ນ D+ ແລະ D- ໃນຊ່ອງຕໍ່ຂໍ້ມູນ. ເນື່ອງຈາກການເກີດຂຶ້ນຂອງສຽງລົບກວນແບບສາມັນ, ອາດຈະມີຄວາມຈຳເປັນຕ້ອງປິດກັ້ນສຽງລົບກວນແບບສາມັນລະຫວ່າງສາຍສົ່ງຂໍ້ມູນທີ່ແບ່ງປັນເສັ້ນດຽວກັນ.
ເພື່ອກຳນົດການນຳໃຊ້ຂອງອົງປະກອບສົນທະນາແບບຄູ່ (common mode inductance), ມັນຈຳເປັນຕ້ອງເຂົ້າໃຈກ່ອນວ່າສຽງລົບກວນແບບຄູ່ (common mode noise) ເກີດຂຶ້ນໄດ້ແນວໃດ: ດັ່ງທີ່ສະແດງໃນຮູບ.2 (ແບບອ້າງອີງສຳລັບໂພງຈ່າຍພະລັງງານ 60W ຂອງ Infineon: DEMO_5QSAG_60W1), ຕົ້ນສະຖານທີ່ເຂົ້າ (input terminal) ແມ່ນແຫຼ່ງເຂົ້າໃຊ້ໄຟຟ້າ 85~300VAC, ແລະ ແຜ່ນວຽນ L, N ໃນຕົ້ນສະຖານທີ່ເຊື່ອມຕໍ່ກັບພື້ນຖານອ້າງອີງ (reference ground). ໃນຄວາມເປັນຈິງ, ຍັງມີສາຍດິນ (Green Line) ທີ່ເຊື່ອມຕໍ່ກັບພື້ນຖານອ້າງອີງນີ້ ແລະ ໄປເຊື່ອມຕໍ່ກັບພື້ນຖານທາງດ້ານຮ່າງກາຍ (physical ground). ປັດຈຸບັນສາຍ L ແລະ ສາຍ N ສ້າງເປັນວົງຈອນພະລັງງານ ແລະ ເຊື່ອມຕໍ່ຂ້າມຂ້າງປັ້ນປ່ຽນ Flyback transformer. ການກຳນົດຂອງ Q11 ເຊິ່ງເປັນທໍ່ສະວິດພະລັງງານຫຼັກໃຊ້ MOS transistor IPA80R600P7 ສາມາດຕ້ານທານໄດ້ສູງສຸດ 800V super junction, ມີຂອບເຂດ Rds (on) ສູງສຸດ 600mΩ. ເພື່ອຈຳກັດຄວາມຮ້ອນ, ສື່ກາງທີ່ແຜ່ຄວາມຮ້ອນອອກ (ແຜ່ນລົມອາລູມິນຽມ) ມັກຈະຖືກຕິດຢູ່ໃນເປືອກຂອງມັນ, ສິ່ງນີ້ຈະເພີ່ມຄວາມສາມາດໃນການເຊື່ອມຕໍ່ສູງຂອງມັນກັບພື້ນຖານ, ສ້າງການເຊື່ອມຕໍ່ຄວາມສາມາດ (capacitive coupling), ແລະ ສົ່ງຜ່ານຄວາມດັນສູງ ແລະ ຄວາມຖີ່ສູງຈາກຕົ້ນສະຖານທີ່ເຂົ້າເພື່ອສ້າງສັກຍະພາບທີ່ມີຄຸນນະສົມບັດດ້ານສຽງລົບກວນ. ສາຍ L ແລະ N ຢູ່ຕົ້ນສະຖານທີ່ເຂົ້າກໍ່ຈະໄດ້ຮັບສັກຍະພາບນີ້ຜ່ານພື້ນຖານອ້າງອີງ, ສິ່ງນີ້ຈຶ່ງສ້າງເປັນແຫຼ່ງສຽງລົບກວນແບບຄູ່. ມັນຄວນສັງເກດວ່າການເຊື່ອມຕໍ່ຄວາມສາມາດ (capacitive coupling), ເຊິ່ງເປັນແຫຼ່ງສຽງລົບກວນແບບຄູ່ຫຼັກທີ່ການທົດສອບ EMC ຕ້ອງປະເຊີນໜ້າ, ມີຢູ່ຢ່າງກ້ວາງຂວາງໃນແຫຼ່ງພະລັງງານຕ່າງໆທີ່ມີ AC-DC ເປັນຮູບແບບຫຼັກ ແລະ ຮູບຊົງໂຄງສ້າງຕ່າງໆ. ພ້ອມກັນນັ້ນ, ຍັງມີວົງຈອນໄຟຟ້ານ້ອຍໆຫຼາຍອັນຢູ່ຂ້າງປັ້ນປ່ຽນ ແລະ ຂ້າງທີສອງ (primary and secondary sides of transformers), ແຕ່ລະວົງຈອນນ້ອຍໆເພີ່ມຂຶ້ນກໍ່ເຮັດໃຫ້ປະລິมาณໄຟຟ້າສຽງລົບກວນແບບອິນດັກຕິບ (inductive coupling) ເພີ່ມຂຶ້ນ, ສິ່ງນີ້ກໍ່ນຳໄປສູ່ສຽງລົບກວນແບບຄູ່ ຫຼື ສຽງລົບກວນແບບຄວາມແຕກຕ່າງ (differential mode noise) ທີ່ຄາດຄະເນຍາກ. ສະນັ້ນ, ມັນນຳເອົາຄວາມບໍ່ແນ່ນອນຫຼາຍຢ່າງໃນການປັບປຸງ EMC, ນີ້ກໍ່ເປັນເຫດຜົນທີ່ຍັງບໍ່ສາມາດອີງໃສ່ຊອບແວຈຳລອງສຳລັບການຈຳລອງຄວາມສອດຄ່ອງດ້ານໄຟຟ້າເທິງເຄື່ອງມື (electromagnetic compatibility simulation).
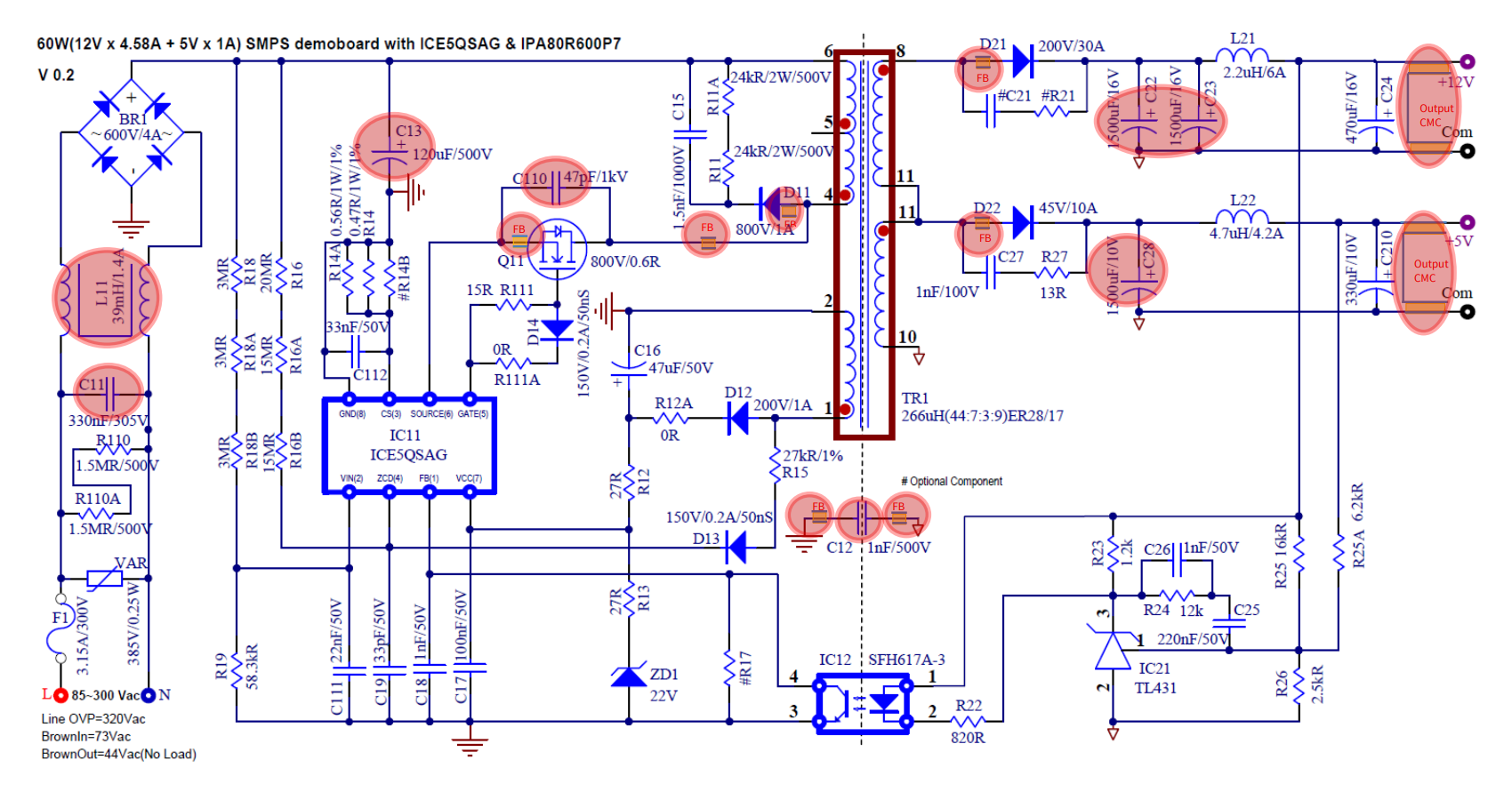

ຮູບ.2 ຕົວຢ່າງຂອງສ່ວນປະກອບຍຸດທະສາດ EMI (Infineon DEMO_5QSAG_60W1)
ເພື່ອປະເມີນຂະໜາດຂອງສຽງສຽງສາມັນ, ມັນມັກຈະຈຳເປັນຕ້ອງສົມມຸດຄວາມອາດສາມັນໃນວົງຈອນສຽງສາມັນ, ເຊິ່ງໂດຍປົກກະຕິແມ່ນຢູ່ໃນຂອບເຂດຫຼີ້ນສິບ pF. ໃນຕົວຢ່າງທີ່ສະແດງໃນຮູບ.2, ຖ້າສົມມຸດຄວາມອາດສາມັນເທົ່າກັບ 20pF, ເມື່ອແຫຼ່ງຈ່າຍປະຈຸລຽນເຂົ້າແມ່ນ 230Vac ແລະ ຄວາມຖີ່ຂອງສະວິດໄຟແຫຼ່ງແມ່ນ 200KHz, ຄວາມກ້ວາງພິວດທັງໝົດໃນການປິດ-ເປີດແມ່ນ 1 µs ແລະ ຂອບຂຶ້ນ-ລົງແມ່ນ 0.2 µs ຕາມລຳດັບ. ແຮງດັນສູງສຸດທີ່ສາຍເຂົ້າແມ່ນ  , ອັດຕາສ່ວນການເຮັດວຽກຂອງປະຈຸລຽນ AC ຜ່ານສະວິດແມ່ນ
, ອັດຕາສ່ວນການເຮັດວຽກຂອງປະຈຸລຽນ AC ຜ່ານສະວິດແມ່ນ  . ຄວາມຖີ່ແຈ້ງຄັ້ງທຳອິດໃນການແຈກຢາຍຄວາມໜາແໜ້ນຄວາມຖີ່ແມ່ນ:
. ຄວາມຖີ່ແຈ້ງຄັ້ງທຳອິດໃນການແຈກຢາຍຄວາມໜາແໜ້ນຄວາມຖີ່ແມ່ນ:
ແຮງດັນທີ່ສອດຄ້ອງກັນໃນຈຸດສູງສຸດຄັ້ງທຳອິດ (1st harmonic) ໃນການແຈກຢາຍຄວາມໜາແໜ້ນຄວາມຖີ່ແມ່ນ:

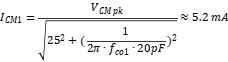
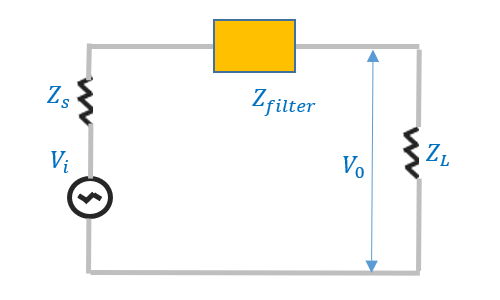
ໃນວົງຈອນທີ່ມີສຽງລົບກວນຮູບແບບທຳມະດາ ໂດຍບໍ່ຕໍ່ເຂົ້າກັບຕົວຕ້ານສຽງຮູບແບບທຳມະດາ, ລະດັບກະແສໄຟຟ້າສູງສຸດໃນຮູບແບບທຳມະດາສາມາດຄາດຄະເນໄດ້ໂດຍການບໍ່ສົນໃຈອິມພິດແທນ (ເຊັ່ນ: ຄວາມຕ້ານທາງລວດ, ການແລ່ນລົງທຶນທີ່ບໍ່ຕັ້ງໃຈ, ແລະອື່ນໆ) ດັ່ງທີ່ສະແດງໃນຮູບ.3. ເມື່ອເຊື່ອມຕໍ່ກັບ LISN (ເຄືອຂ່າຍຄວາມຕ້ານທາງເຊິ່ງຖືກປັບຄວາມສົມດຸນ), ມະຫານະຂອງກະແສໄຟຟ້າໃນຮູບແບບທຳມະດາຈະເປັນ:
ດັ່ງນັ້ນ, ຄ່າແອັມປລິຈູດຂອງສຽງລົບກວນໃນຮູບແບບທຳມະດາທີ່ໄດ້ຮັບໂດຍຜ່ານຕົວຮັບສັນຍານທົດສອບ (ເຄື່ອງວັດແທກຄວາມຖີ່) ຢູ່ທາງຊ່ອງ LISN ຈະເປັນ:

ເຖິງຢ່າງໃດກໍຕາມຜົນໄດ້ຮັບທີ່ແທ້ຈິງທີ່ຖືກຄົ້ນພົບໃນຕົວຮັບທົດສອບແມ່ນ:

ນັ້ນແມ່ນເວົ້າວ່າ, ຄ່າແອັມປລິຈູດຂອງສຽງລົບກວນໃນຮູບແບບທຳມະດາ ແລະ ສຽງລົບກວນໃນຮູບແບບຄວາມແຕກຕ່າງຖືກເຊື່ອມໂຍງກັນ, ແຕ່ແນ່ນອນວ່າຖ້າຮູບແບບທຳມະດາຖືກຄວບຄຸມ, ຜົນໄດ້ຮັບການທົດສອບສຸດທ້າຍກໍຈະດີຂື້ນ. ດັ່ງນັ້ນ, ຕົວຢ່າງເຊັ່ນ: ສຳລັບມາດຕະຖານ EMC EN55022 ສຳລັບການສື່ສານທົ່ວໄປ ແລະ ການນຳໃຊ້ໃນອຸດສາຫະກຳ, ຄ່າແອັມປລິຈູດ QP ຈະຕ້ອງຕ່ຳກ່ວາ  ໃນຂອບເຂດ 150KHz ຫາ 500KHz. ດັ່ງນັ້ນ, ສູງສຸດ
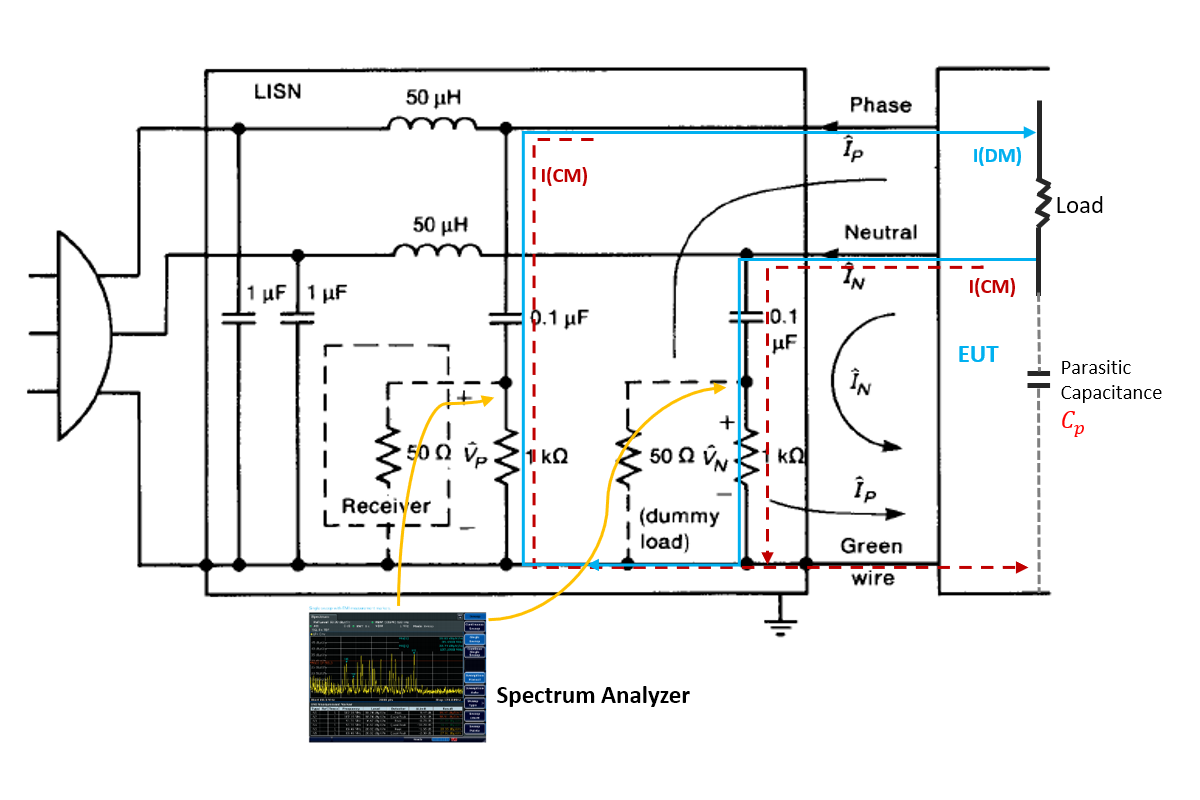
ໃນຂອບເຂດ 150KHz ຫາ 500KHz. ດັ່ງນັ້ນ, ສູງສຸດ  ການບັນເຊົາສຽງລົບກວນຕ້ອງດຳເນີນຢູ່ທີ່ນີ້. ຍົກຕົວຢ່າງເປົ້າຫມາຍການບັນເຊົາ -20dB, ດ້ວຍການຄິດໄລ່ງ່າຍໆ, ຄວາມຕ້ານທາງຫຼັກໃນວົງຈອນຮູບແບບທົ່ວໄປແມ່ນຄວາມຕ້ານຂອງຄວາມສາມາດໃນຕົວເຊິ່ງປະມານ 25K Ω. ດັ່ງທີ່ສະແດງໃນຮູບ.4, ຄວາມຕ້ານທາງຮູບແບບທົ່ວໄປທີ່ຕ້ອງການແມ່ນປະມານ 250K Ω, ສາມາດປ່ຽນເປັນອິນດັກຕໍຣະດັບຮູບແບບທົ່ວໄປ 125mH.
ການບັນເຊົາສຽງລົບກວນຕ້ອງດຳເນີນຢູ່ທີ່ນີ້. ຍົກຕົວຢ່າງເປົ້າຫມາຍການບັນເຊົາ -20dB, ດ້ວຍການຄິດໄລ່ງ່າຍໆ, ຄວາມຕ້ານທາງຫຼັກໃນວົງຈອນຮູບແບບທົ່ວໄປແມ່ນຄວາມຕ້ານຂອງຄວາມສາມາດໃນຕົວເຊິ່ງປະມານ 25K Ω. ດັ່ງທີ່ສະແດງໃນຮູບ.4, ຄວາມຕ້ານທາງຮູບແບບທົ່ວໄປທີ່ຕ້ອງການແມ່ນປະມານ 250K Ω, ສາມາດປ່ຽນເປັນອິນດັກຕໍຣະດັບຮູບແບບທົ່ວໄປ 125mH.
ຮູບ.3 ແຜນວາດທົດສອບການດຳເນີນງານໃນການທົດສອບ EMC (ແຜນວາດວົງຈອນສຽງລົບກວນຮູບແບບທົ່ວໄປ ແລະ ສັນຍານຮູບແບບຄວາມແຕກຕ່າງ)
ຮູບ.4 ຄວາມສຳພັນລະຫວ່າງວົງຈອນການສູນເສຍການສືບຕໍ່ຂອງຕົວກັ້ນ (ຊ້າຍ) ແລະ ຄວາມແຮງການບັນເຊົາ ແລະ ຄວາມຕ້ານທາງຕົວກັ້ນທີ່ສອດຄ້ອງກັນ (ຂວາ)
ນອກຈາກການນຳໃຊ້ໄຟຟ້າຮ່ວມກັນ (common mode inductance) ໃນເສັ້ນທາງໄຟຟ້າທົ່ວໄປ, ໄຟຟ້າຮ່ວມກັນຍັງມັກພົບເຫັນຢູ່ໃນເສັ້ນທາງສັນຍານຄວາມໄວສູງເຊັ່ນ: USB 3.0, HDMI, LAN ແລະອື່ນໆ, ຫຼືບາງເສັ້ນທາງສັນຍານ LVDS ເຊັ່ນ: CAN BUS, SPI ຫຼື RS232, RS485 ແລະອື່ນໆ. ການນຳໃຊ້ຕົວໄຟຟ້າຮ່ວມກັນໃນເສັ້ນທາງສັນຍານຍັງມີຫນ້າທີ່ໃນການຄວບຄຸມສຽງລົບກວນແບບຮ່ວມກັນ (common mode noise), ເຊັ່ນ: ອັດຕາການຕ້ານທານສຽງລົບກວນແບບຮ່ວມກັນ (common mode rejection ratio) ທີ່ຕ້ອງການເພື່ອຕອບສະຫນອງຂໍ້ກຳນົດການສື່ສານບາງຢ່າງ. ແຕ່ຢ່າງໃດກໍຕາມ, ຈຸດສຳຄັນຫຼາຍກ່ວານັ້ນມາຈາກຜົນກະທົບຂອງການຊົດເຊີຍກະແສໄຟຟ້າທີ່ມັນມີ, ດັ່ງທີ່ໄດ້ກ່າວມາແຕ່ຕົ້ນ, ເຊິ່ງກໍຄືຕົວໄຟຟ້າຮ່ວມກັນປະເພດການຊົດເຊີຍກະແສໄຟຟ້າ.
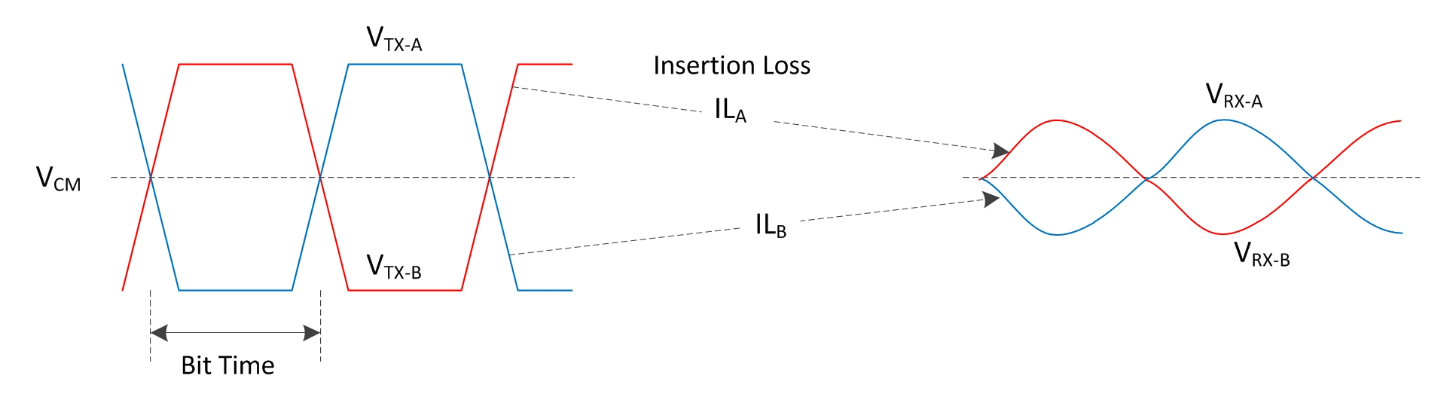
ດັ່ງທີ່ສະແດງໃນ ຮູບ.5, ສາຍສັນຍານຄວາມໄວສູງໂດຍທົ່ວໄປຈະໃຊ້ການສົ່ງຜ່ານສອງຂັ້ວເພື່ອສົ່ງສັນຍານ. ມີຕົວຕ້ານທານ, ຕົວເກັບໄຟຟ້າທີ່ບໍ່ຕັ້ງໃຈ (stray capacitors), ແລະ inductors ທີ່ແຜ່ກະຈາຍຢູ່ເທິງສາຍສັນຍານ. ສາຍຄູ່ບິດ (Twisted pair cables) ສາມາດຫຼຸດຕົວເກັບໄຟຟ້າທີ່ບໍ່ຕັ້ງໃຈໄດ້ຢ່າງມີປະສິດທິພາບ ແຕ່ບໍ່ສາມາດລຶບ inductors ທີ່ແຜ່ກະຈາຍໄດ້. ດັ່ງນັ້ນ, ຈຶ່ງມີ inductance ສອງຂັ້ວເຂົ້າຢູ່ທີ່ຕົ້ນຮັບ, ແລະ ປັດຈຸບັນທີ່ເຊື່ອມໂຍງກັນໃນສາຍຈະສ້າງສຽງລົບກວນຂຶ້ນໃນຮູບສັນຍານ. ສຽງລົບກວນເຫຼົ່ານີ້ຖືກແຈກຢາຍເກືອບເທົ່າກັນທັງສອງຂ້າງຂອງຕົ້ນຮັບໂດຍອີງໃສ່ຄວາມສົມດຸນຂອງສາຍສົ່ງ. ໃນປັດຈຸບັນທີ່ຕົວກັນສຽງລົບກວນຮູບແບບທົ່ວໄປ (common mode inductor) ຖືກຕິດຕັ້ງຢູ່ທີ່ຕຳແໜ່ງເຂົ້າຂອງຕົ້ນຮັບ, ສຽງລົບກວນທີ່ເກືອບເທົ່າກັນຈະຖືກຍົກເລີກຜ່ານການເຊື່ອມໂຍງຂອງຕົວກັນສຽງລົບກວນຮູບແບບທົ່ວໄປ, ຊຶ່ງສາມາດຫຼຸດສຽງລົບກວນການເຊື່ອມໂຍງລົງໄດ້ຢ່າງຫຼວງຫຼາຍ. ນັ້ນແມ່ນ, ຜົນກະທົບຂອງການຊົດເຊີຍປັດຈຸບັນຊ່ວຍຫຼຸດສຽງລົບກວນເຂົ້າທີ່ຕົ້ນຮັບ.
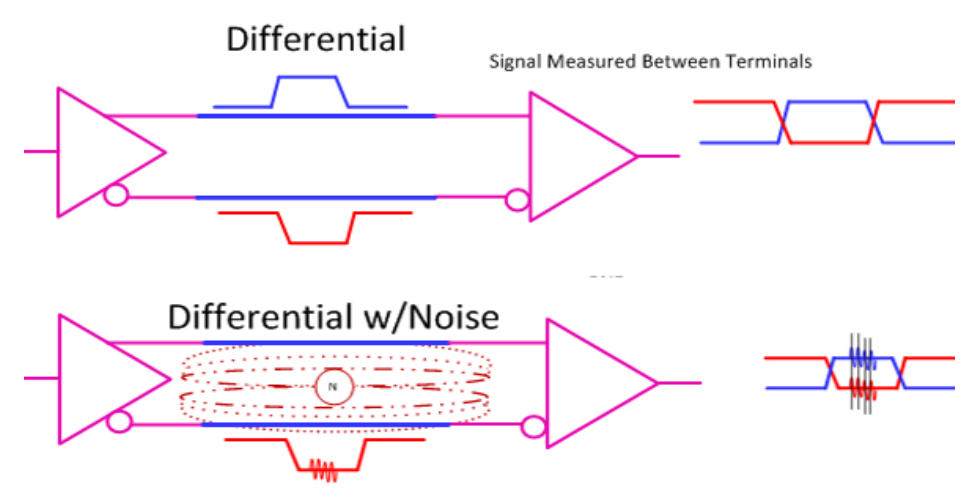
ຮູບທີ 6 ຂະບວນການສົ່ງຂອງສັນຍານດິຟເຟີເຣີນ (differential signals) ໄປຕາມເສັ້ນທາງການສົ່ງຈາກດ້ານສົ່ງໄປຫາດ້ານຮັບ (ຊ້າຍ) ແລະ ການປັບປຸງໂດຍການໃຊ້ຂດໄຟຟ້າຮູບແບບຄອມມໍ (common mode inductors) ທີ່ດ້ານຮັບ (ຂວາ)
ໃນແຜນ¿ຕາຂອງສັນຍານ, ດັ່ງທີ່ສະແດງໃນຮູບທີ 6, ໂດຍການຫຼຸດຜ່ອນການສູນເສຍທີ່ເກີດຈາກຄວາມອົດທົນຂອງສາຍ, ອັດຕາສ່ວນສັນຍານຕໍ່ສຽງລົບ (signal-to-noise ratio) ຈະດີຂື້ນ, ສິ່ງນີ້ມີຄວາມສຳຄັນຕໍ່ສາຍສົ່ງທີ່ຍາວກ່ວາຫຼືສາຍສັນຍານຄວາມໄວສູງ. ໂດຍທົ່ວໄປແລ້ວ, ສາຍສົ່ງທີ່ໃຊ້ສຳລັບຊ່ອງສັນຍານຂ້າງເທິງມັກຈະເປັນສາຍສົ່ງທີ່ມີຄວາມຕ້ານທານ 90~120 Ω. ຕາມຄວາມຕ້ອງການຂອງແຜ່ນຄວາມຖີ່ຂອງສັນຍານໂດຍສະເພາະ, ມັກຈະເລືອກອິນດັກແທຼນ (inductors) ທີ່ມີຄວາມຕ້ານທານຄືກັນໃນຂະນະທີ່ມີຄ່າຕັ້ງແຕ່ 1 ຫາ 10 ເທົ່າ ເພື່ອໃຫ້ການຄວບຄຸມຄວາມເສຍດສີ້ຍ (common mode suppression) ຢູ່ໃນຂອບເຂດ -6dB ຫາ -20dB. ສິ່ງນີ້ຄ້າຍຄືກັບການນຳໃຊ້ໃນໜ່ວຍຈ່າຍໄຟຟ້າທີ່ກ່າວມາກ່ອນ, ຂຶ້ນຢູ່ກັບຂະໜາດຄວາມຕ້ານທານຂອງວົງຈອນຄວາມເສຍດສີ້ຍ. ແນ່ນອນ, ເມື່ອຄວາມຖີ່ເພີ່ມຂື້ນ (ເນື່ອງຈາກຄວາມຕ້ອງການຂອງການສົ່ງສັນຍານຄວາມໄວສູງ), ຄວາມຕ້ານທານຄວາມເສຍດສີ້ຍຂອງລະບົບຈະຫຼຸດລົງ, ແລະການໃຫ້ອິນດັກແທຼນຫຼາຍເກີນໄປຈະເຮັດໃຫ້ແຜ່ນຄວາມຖີ່ຂອງຕົວກັ້ນ (filtering bandwidth) ຖືກລົງ. ສະນັ້ນ, ຈຳເປັນຕ້ອງກວດສອບວ່າອິນດັກແທຼນທີ່ເລືອກໄວ້ນັ້ນສອດຄ່ອງກັບຄວາມຕ້ອງການໃນການສົ່ງຂອງສັນຍານຄວາມໄວສູງບໍ່.
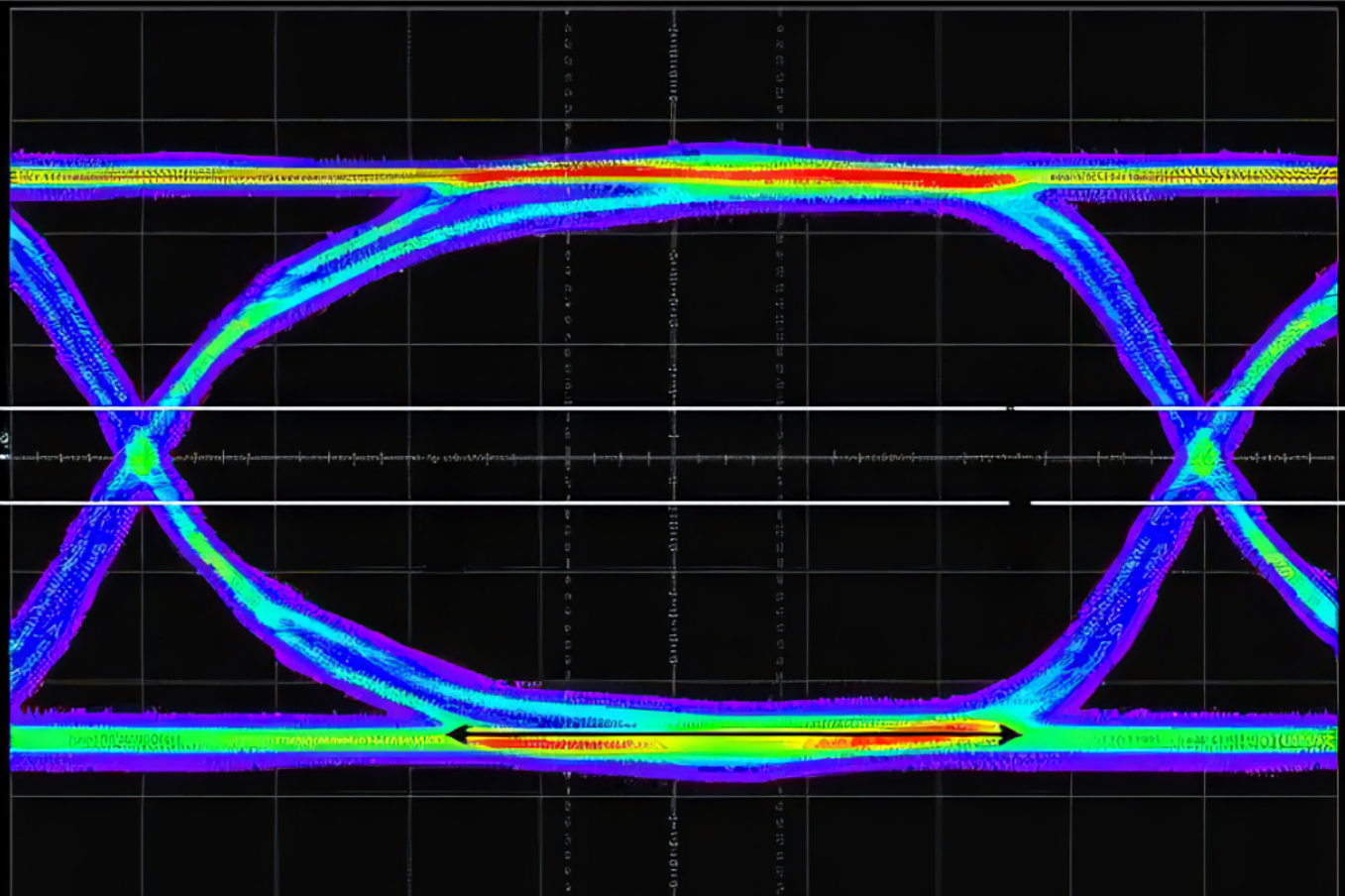
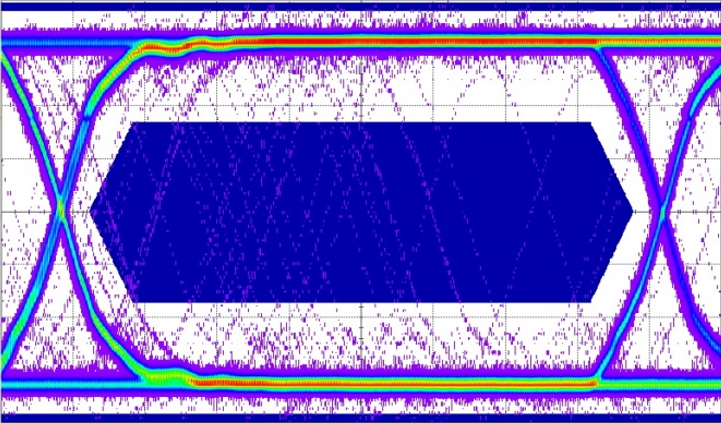
ຮູບທີ 6: ແຜນວາດສະແກນເນີກແຊມຂອງຄຸນນະພາບສັນຍານທີ່ຖືກປັບປຸງໂດຍການສູນເສຍສາຍໃນສາຍສົ່ງຄວບຄູ່
3- ອັນຕະລາຍຂອງສຽງສາກສົມທົບ
ດັ່ງນັ້ນ, ບັນຫາຂອງສຽງຮວມ (common mode noise) ແມ່ນຫຍັງ? ເປັນຫຍັງຈຶ່ງມັກຈະຕ້ອງໃຫ້ຄວາມສຳຄັນໃນການຄວບຄຸມສຽງຮວມ (common mode noise) ໃນວົງຈອນເວລາທົດສອບ EMC? ແນ່ນອນຢູ່ແລ້ວ, ເພື່ອໃຫ້ເຖິງມາດຕະຖານໃບຢັ້ງຢືນ EMC ຂອງແຕ່ລະປະເທດ, ມັນຈຳເປັນຕ້ອງຈຳກັດຄວາມແປປວນ (amplitude) ຂອງສັນຍານຮູບແບບຮວມ (common mode) ແລະ ຮູບແບບຄວາມແຕກຕ່າງ (differential mode), ປົກປ້ອງຄວາມປອດໄພຂອງຜະລິດຕະພັນ ແລະ ຫຼຸດຜ່ອນຜົນກະທົບທີ່ເປັນໄປໄດ້ຕໍ່ຕົວເຄື່ອງໃຊ້ໄຟຟ້າ ແລະ ລະບົບສາຍໄຟຟ້າ. ອີກປະການຫນຶ່ງ, ຈາກມຸມເບິ່ງຂອງຄວາມຖືກຕ້ອງຂອງພະລັງງານ ແລະ ສັນຍານ, ອຸປະກອນໄຟຟ້າ ແລະ ຕົວຄວບຄຸມເຄື່ອງໃຊ້ໄຟຟ້າສ່ວນຫຼາຍເຮັດວຽກທີ່ຄວາມດັນຕ່ຳ, ສຽງເສຍດທີ່ເພີ່ມເຂົ້າມາອາດຈະເຮັດໃຫ້ສັນຍານຄວບຄຸມ ຫຼື ຂໍ້ມູນທີ່ຖືກຖ່າຍໂອນຜິດພາດ, ແມ້ກະທັ້ງເຮັດໃຫ້ເກີດຂໍ້ຜິດພາດ ແລະ ການຢຸດເຊົາການເຮັດວຽກ. ສຽງລົບກວນເຫຼົ່ານີ້ອາດຈະມາຈາກທັງບອດວົງຈອນ ແລະ ສຽງ RF interference, ຕົວຢ່າງເຊັ່ນ: ການຕັດການເຊື່ອມຕໍ່ຂອງອຸປະກອນມືຖື ຫຼື ສຽງນົກນ້ຳເວລາຟັງວິທະຍຸ. ສຸດທ້າຍ, ສຽງຮວມ (common mode noise) ທີ່ຫຼາຍເກີນໄປອາດຈະຖືກປ່ອຍອອກໄປໃນອາກາດໃນຮູບແບບຂອງການປ່ອຍຄວາມຖີ່ສູງ, ເຊັ່ນ: ໃນວົງຈອນຮູບແບບຮວມຂະຫນາດໃຫຍ່ ຫຼື ໂຕນຳໄຟຟ້າທີ່ຄ້າຍຄືກັບແອນເທັນນາ, ເຊິ່ງອາດຈະເປັນອັນຕະລາຍຕໍ່ສຸຂະພາບໃນໄລຍະຍາວ ແລະ ຄົນເຮົາບໍ່ສາມາດຮັບຮູ້ໄດ້.
ເພື່ອໃຫ້ບັນຫາງ່າຍຂຶ້ນ, ພວກເຮົາທຽບເທົ່າກັບແຖວສົ່ງໄຟຟ້າເປັນຄູ່ສາຍ Hertz ແລະ ຮັບເອົາແບບຈຳລອງສຽງແບບ common mode ທີ່ສາມາດເບິ່ງໄດ້ໃນຮູບທີ 7. ໄລຍະຫ່າງລະຫວ່າງຈຸດທົດສອບກັບຕຳແໜ່ງກາງຂອງແຖວສາຍສົ່ງໄຟຟ້າແບບ common mode ແມ່ນ d, ໂດຍທົ່ວໄປແລ້ວມັນຈະໃຫຍ່ກ່ວາຂະໜາດວົງຈອນຫຼາຍ ສະນັ້ນມັນຈຶ່ງເປັນຈຸດທົດສອບໄລຍະໄກ. ດັ່ງນັ້ນ, ສຳລັບການປ່ອຍຄວາມເຂັ້ມຂອງແອັນເທັນນາໃນໄລຍະໄກ:
ໃນນັ້ນ,  ແມ່ນຄ່າคงທີ່ຂອງເວລາທີ່ກ່ຽວຂ້ອງກັບຄວາມຍາວຄື້ນທີ່ປ່ອຍອອກມາ,
ແມ່ນຄ່າคงທີ່ຂອງເວລາທີ່ກ່ຽວຂ້ອງກັບຄວາມຍາວຄື້ນທີ່ປ່ອຍອອກມາ,  ແມ່ນໄລຍະຫ່າງລະຫວ່າງຕຳແໜ່ງທົດສອບ,
ແມ່ນໄລຍະຫ່າງລະຫວ່າງຕຳແໜ່ງທົດສອບ,  ແມ່ນມຸມຂອງແຜ່ນທີ່ເບີກອອກໂດຍ θ ອົງສາຈາກຮູບແບບການປ່ອຍຂອງແອັນເທັນນາ, ແລະ ສຳລັບຄູ່ສາຍ Hertz
ແມ່ນມຸມຂອງແຜ່ນທີ່ເບີກອອກໂດຍ θ ອົງສາຈາກຮູບແບບການປ່ອຍຂອງແອັນເທັນນາ, ແລະ ສຳລັບຄູ່ສາຍ Hertz ![]() , ແລະ
, ແລະ  , ຂຶ້ນກັບປະເພດຂອງແອັນເທັນນາ. ເນື່ອງຈາກການປ່ອຍທີ່ໄດ້ຮັບໃນໄລຍະໄກແມ່ນການກະທຳພ້ອມກັນຂອງສອງສາຍແບບ common mode ໃນມຸມຂອງ
, ຂຶ້ນກັບປະເພດຂອງແອັນເທັນນາ. ເນື່ອງຈາກການປ່ອຍທີ່ໄດ້ຮັບໃນໄລຍະໄກແມ່ນການກະທຳພ້ອມກັນຂອງສອງສາຍແບບ common mode ໃນມຸມຂອງ  , ສະນັ້ນ:
, ສະນັ້ນ:

ສຳລັບສຽງແບບ common mode, ດັ່ງທີ່ສະແດງໃນຮູບທີ 7:  ແລະ
ແລະ  , ການປ່ອຍສູງສຸດໃນຈຸດທົດສອບແມ່ນໄດ້ມາດັ່ງນີ້:
, ການປ່ອຍສູງສຸດໃນຈຸດທົດສອບແມ່ນໄດ້ມາດັ່ງນີ້:

ເມື່ອໄລຍະຫ່າງຂອງສາຍ s ມີຂະໜາດນ້ອຍພຽງພໍ  ດັ່ງນັ້ນມັນສາມາດຖືກລວບລວມເປັນ:
ດັ່ງນັ້ນມັນສາມາດຖືກລວບລວມເປັນ:
ດັ່ງນັ້ນ, ຄວາມເຂັ້ມຂົ້ນຂອງການປ່ຽນແປງສາຍພັນທະບູລິມະສະເພາະ (Common Mode) ຈະແປຮອນຕາມຄວາມຍາວຂອງສາຍສົ່ງສັນຍານພັນທະບູລິມະແລະຫຼຸດລົງຕາມໄລຍະຫ່າງ. ສະແດງຕົວຢ່າງຂອງຂະໜາດຄວາມເຂັ້ມຂົ້ນນີ້: ຖ້າຄວາມຍາວຂອງສາຍສົ່ງສັນຍານພັນທະບູລິມະເທົ່າກັບ 1 ແມັດ ແລະ ຂະໜາດກະແສໄຟຟ້າພັນທະບູລິມະເທົ່າກັບ 7.96 µA, ນີ້ຈະເທົ່າກັບການທົດສອບໃນເຂດ 3 ແມັດຕາມມາດຕະຖານ FCC Class B ທີ່ຄວາມຖີ່ 30MHz, ຄວາມເຂັ້ມຂົ້ນຂອງການປ່ຽນແປງສາຍພັນທະບູລິມະຈະເປັນ:

ຄວາມເຂັ້ມຂົ້ນນີ້ແມ່ນເທົ່າກັບຂອບເຂດມາດຕະຖານພັດ. ຖ້າມີສາຍນຳໄຟຟ້າ ຫຼື ບຸກຄົນຍາວ 1 ແມັດຢູ່ຈຸດທົດສອບຫ່າງ 3 ແມັດ, ຈະຮູ້ສຶກເຖິງຄວາມແຕກຕ່າງຂອງໄຟຟ້າ 100 µV. ການສຳຜັດກັບສະພາບແວດລ້ອມແບບນີ້ໃນໄລຍະຍາວຈະມີຜົນກະທົບຢ່າງຮ້າຍແຮງຕໍ່ສຸຂະພາບຂອງມະນຸດ, ແລະ ການປ່ຽນແປງທີ່ສັ່ງເຄື່ອນອາດຈະເຮັດໃຫ້ເກີດພະຍາດເຮື້ອຮັງຫຼື ອາການບາດເຈັບຕ່າງໆ, ນີ້ກໍເປັນສິ່ງສຳຄັນໃນການຢັ້ງຢືນ EMC.
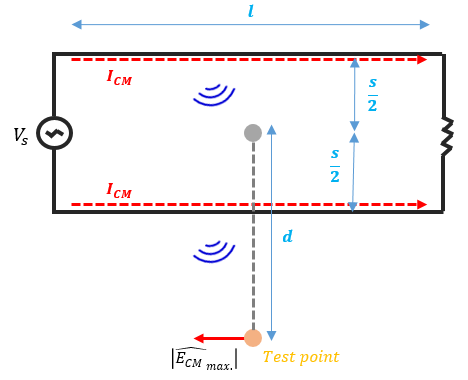
ຮູບທີ 7: ແຜນຜັງແບບຈຳລອງການປ່ຽນແປງ ແລະ ຈຸດທົດສອບຂອງສຽງສັນຍານພັນທະບູລິມະ
ໂຄງສ້າງຄື້ນສັນຍານໃນວົງຈອນປິດ-ເປີດສ່ວນຫຼາຍສາມາດຈັດປະເພດເປັນຄື້ນຮູບສີ່ເຫຼີຍ (trapezoidal wave), ແລະ ສະເກັດຄວາມຖີ່ຂອງມັນສະແດງໃຫ້ເຫັນເຖິງສອງຂັ້ນຕອນຂອງການຫຼຸດລົງ  ກັບ
ກັບ  ພ້ອມກັບການເພີ່ມຂື້ນຂອງລະດັບຄວາມຖີ່. ໂໜ້ຍແມ່ນຄວາມຖີ່ແບບມຸມສອງແຫ່ງທຳອິດ ແລະ ຄວາມຖີ່ແບບເວລາຂອງກະບອກ. ສະເປັກຕຼັມຄວາມເຂັ້ມຂອງການປ່ອຍຄືກ່າວຂ້າງເທິງຈະເພີ່ມຂື້ນຢ່າງຊັດເຈັນຕາມຄວາມຖີ່ໂດຍ
ພ້ອມກັບການເພີ່ມຂື້ນຂອງລະດັບຄວາມຖີ່. ໂໜ້ຍແມ່ນຄວາມຖີ່ແບບມຸມສອງແຫ່ງທຳອິດ ແລະ ຄວາມຖີ່ແບບເວລາຂອງກະບອກ. ສະເປັກຕຼັມຄວາມເຂັ້ມຂອງການປ່ອຍຄືກ່າວຂ້າງເທິງຈະເພີ່ມຂື້ນຢ່າງຊັດເຈັນຕາມຄວາມຖີ່ໂດຍ  . ດັ່ງນັ້ນ, ສຳລັບແຫຼ່ງຈ່າຍໄຟຟ້າທີ່ມີການສະວິດ (Switching power supplies) ແລະ ວົງຈອນສັນຍານຮູບສີ່ຫຼ່ຽມ, ສະເປັກຕຼັມການປ່ອຍຄວາມຖີ່ສາມັນຈະສະແດງໃຫ້ເຫັນລັກສະນະການແຈກຢາຍທີ່ເພີ່ມຂື້ນໃນຕອນທຳອິດ ແລ້ວຫຼັງຈາກນັ້ນກໍ້ຈະຫຼຸດລົງຄືກັບຮູບທີ່ສະແດງໃນຮູບທີ່ 8. ດັ່ງນັ້ນ, ພາກສ່ວນກາງແມ່ນພາກສ່ວນທີ່ຕ້ອງຄວບຄຸມ ຫຼື ປະກັນພິເສດ.
. ດັ່ງນັ້ນ, ສຳລັບແຫຼ່ງຈ່າຍໄຟຟ້າທີ່ມີການສະວິດ (Switching power supplies) ແລະ ວົງຈອນສັນຍານຮູບສີ່ຫຼ່ຽມ, ສະເປັກຕຼັມການປ່ອຍຄວາມຖີ່ສາມັນຈະສະແດງໃຫ້ເຫັນລັກສະນະການແຈກຢາຍທີ່ເພີ່ມຂື້ນໃນຕອນທຳອິດ ແລ້ວຫຼັງຈາກນັ້ນກໍ້ຈະຫຼຸດລົງຄືກັບຮູບທີ່ສະແດງໃນຮູບທີ່ 8. ດັ່ງນັ້ນ, ພາກສ່ວນກາງແມ່ນພາກສ່ວນທີ່ຕ້ອງຄວບຄຸມ ຫຼື ປະກັນພິເສດ.
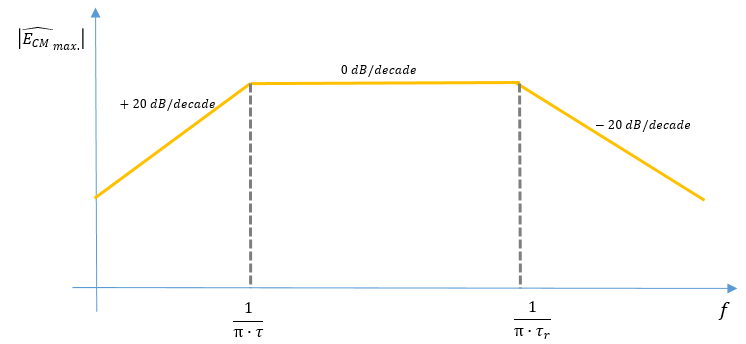
ຮູບທີ 8: ການແຈກຢາຍຄວາມເຂັ້ມຂອງສຽງຄວາມຖີ່ສາມັນທີ່ສອດຄ້ອງກັບຄວາມຖີ່ສີ່ຫຼ່ຽມຄາບປົກກະຕິ
4- ການເລືອກຕົວເຊື່ອມຕໍ່ສາກສົມທົບ
ສຳລັບແຜ່ນດິນໄຟຟ້າ, ແຫຼ່ງຂອງສຽງສະຖານທີ່ຄ້າງເຄີຍຈະຄ່ອນຂ້າງຊັດເຈນ, ແຕ່ປັດໃຈທີ່ກະຈາຍອອກໄປຍາກທີ່ຈະວັດແທກຜ່ານເຄື່ອງມື. ໃນຫຼາຍກໍລະນີ, ຜົນໄດ້ຮັບຈະຖືກປະມານຄ່າຢ່າງຊ້າໆໂດຍການວິເຄາະຫຼັງຈາກການທົດສອບ, ສະນັ້ນປະສົບການທີ່ສະສົມມາແມ່ນມີຄວາມສຳຄັນຫຼາຍ. ໃນເວລານຳສະເໜີການນຳໃຊ້ຂອງຕົວຕ້ານສະຖານທີ່ຄ້າງເຄີຍໃນພາກທີ 2 ຂອງບົດຄວາມນີ້, ມັນໄດ້ຖືກກ່າວເຖິງແລ້ວວ່າການຄາດຄະເນທາງທິດສະດີຂອງຄວາມກ້ວາງຂອງສຽງສະຖານທີ່ຄ້າງເຄີຍ ແລະ ຄວາມຕ້ອງການຕົວຕ້ານສະຖານທີ່ຄ້າງເຄີຍທີ່ສອດຄ້ອງກັນສາມາດເປັນຈຸດເລີ່ມຕົ້ນຂອງການທົດລອງໃນໄລຍະຕົ້ນ.
ໂດຍປົກກະຕິ, ຕົວເຊື່ອມສານຮູບແບບທົ່ວໄປທີ່ໃຊ້ໃນຂັ້ນຕອນການກັ້ນຕອງຂອງສາຍພະລັງງານ AC-DC ກິນເຂົ້າໃຊ້ວົງແຫວນເຫຼັກທີ່ມີວົງຈອນປິດເປັນໃຈກາງ. ຄວາມເປັນປະໂຫຍດຂອງສິ່ງນີ້ແມ່ນມັນສາມາດບັນລຸຄວາມອົດທົນຕໍ່ການຮົ່ວໄດ້ຕໍ່າຫຼາຍ ແລະ ສຳປະສິດການເຊື່ອມຕໍ່ສູງຫຼາຍ. ສຳລັບແຮງດັນເຂົ້າໃຊ້ສູງ ແລະ ຄວາມຖີ່ສະວິດຊິ້ງຕໍ່າ, ມັນສາມາດໃຫ້ຄວາມຕ້ານທານຮູບແບບທົ່ວໄປສູງເພື່ອປະຕິເສດຄວາມກົດດັນສຽງຮູບແບບທົ່ວໄປທີ່ມີຄວາມສູງ. ເນື່ອງຈາກຄວາມເປັນໄປໄດ້ຂອງວັດສະດຸເຫຼັກສາມາດແບ່ງອອກເປັນສ່ວນທີ່ເປັນຂະບວນການ ![]() ແລະ ສ່ວນທີ່ສູນເສຍ
ແລະ ສ່ວນທີ່ສູນເສຍ ![]() ເມື່ອໃຈກາງແມ່ເຫຼັກມາໃກ້ຫຼືເກີນຂີດສູງສຸດຂອງຄຸນສົມບັດຕ້ານຢູ່ນະຈຸດສູງສຸດ, ວາມເສຍຫາຍຈະເປັນສ່ວນໃຫຍ່ຂອງຄວາມຕ້ານ. ໃນເວລານີ້, ການຄວບຄຸມສຽງລົບກວນຈະບໍ່ໄດ້ຖືກບັນລຸໂດຍການຫຼຸດຜ່ອນຄວາມແຮງຂອງສຽງລົບກວນຜ່ານຄວາມຕ້ານທາງອິນດັກຕິບ, ແຕ່ຈະເຮັດໂດຍການດູດຊຶມພະລັງງານສຽງລົບກວນຜ່ານຄວາມຮ້ອນທີ່ເກີດຈາກການສູນເສຍ. ດັ່ງນັ້ນ, ລະດັບຄວາມອິ່ມຕົວທີ່ເໝາະສົມ (ການອິ່ມເກີນໄປຈະເຮັດໃຫ້ຄວາມຕ້ານຫຼຸດລົງ) ຈະບໍ່ສົ່ງຜົນກະທົບຕໍ່ປະສິດທິພາບໃນການຄວບຄຸມສຽງລົບກວນ, ສະນັ້ນພວກເຮົາບໍ່ຈຳເປັນຕ້ອງຊອກຫາຄ່າແປທາງດ້ານກຳລັງໄຟຟ້າຄືກັນກັບທີ່ມີຢູ່ໃນອິນດັກເຕີພະລັງງານ.
ເມື່ອໃຈກາງແມ່ເຫຼັກມາໃກ້ຫຼືເກີນຂີດສູງສຸດຂອງຄຸນສົມບັດຕ້ານຢູ່ນະຈຸດສູງສຸດ, ວາມເສຍຫາຍຈະເປັນສ່ວນໃຫຍ່ຂອງຄວາມຕ້ານ. ໃນເວລານີ້, ການຄວບຄຸມສຽງລົບກວນຈະບໍ່ໄດ້ຖືກບັນລຸໂດຍການຫຼຸດຜ່ອນຄວາມແຮງຂອງສຽງລົບກວນຜ່ານຄວາມຕ້ານທາງອິນດັກຕິບ, ແຕ່ຈະເຮັດໂດຍການດູດຊຶມພະລັງງານສຽງລົບກວນຜ່ານຄວາມຮ້ອນທີ່ເກີດຈາກການສູນເສຍ. ດັ່ງນັ້ນ, ລະດັບຄວາມອິ່ມຕົວທີ່ເໝາະສົມ (ການອິ່ມເກີນໄປຈະເຮັດໃຫ້ຄວາມຕ້ານຫຼຸດລົງ) ຈະບໍ່ສົ່ງຜົນກະທົບຕໍ່ປະສິດທິພາບໃນການຄວບຄຸມສຽງລົບກວນ, ສະນັ້ນພວກເຮົາບໍ່ຈຳເປັນຕ້ອງຊອກຫາຄ່າແປທາງດ້ານກຳລັງໄຟຟ້າຄືກັນກັບທີ່ມີຢູ່ໃນອິນດັກເຕີພະລັງງານ.
ໃນການເລືອກອິນດັກໂທຣ໌ຮູບແບບທົ່ວໄປ.ໃນຂະນະດຽວກັນ, ຖ້າສ່ວນຂອງອິນດັກແທນຄອບເຈັດ, ຕົວຢ່າງເຊັ່ນ: ອິນດັກແທັງ 1mH ມີສຳພັນການຄັບເຊື່ອມຕໍ່ 99%, ຈະມີອິນດັກແທັງຮົ້ວໄຟຟ້າ 10uH ຢູ່ໃນວົງຈອນຄວາມແຕກຕ່າງ.ເມື່ອພິຈາລະນາການກົດດັນສຽງລົບລ້າງຮູບແບບຄວາມແຕກຕ່າງ (ໂດຍທົ່ວໄປແມ່ນຕົວກັ້ນສຽງ LC), ສ່ວນຂອງອິນດັກແທັງຮົ້ວໄຟຟ້ານີ້ກໍ່ຕ້ອງໄດ້ຮັບການຄິດໄລ່ເຊັ່ນກັນ.ອິນດັກແທັງຮົ້ວໄຟຟ້າທີ່ເໝາະສົມຈະຊ່ວຍໃນການກົດດັນສຽງລົບລ້າງຄວາມຖີ່ສູງ, ແຕ່ເນື່ອງຈາກອິນດັກໂທຣ໌ຮູບແບບທົ່ວໄປສ່ວນຫຼາຍໃຊ້ຫຼັກຂອງແມັກເນດທີ່ປິດ, ມັນງ່າຍທີ່ຈະເຮັດໃຫ້ຫຼັກຂອງແມັກເນດບໍລິບູນໃນກະແສໄຟຟ້າທີ່ສູງ, ຊຶ່ງມີຜົນກະທົບຕໍ່ປະສິດທິພາບຂອງການປ່ຽນແປງພະລັງງານແລະຄວາມກ້ວາງຂອງຕົວກັ້ນສຽງ.ການປັບປຸງສ່ວນຂອງອິນດັກແທັງຮົ້ວໄຟຟ້າສາມາດບັນລຸໄດ້ໂດຍການໃຊ້ໂຄງສ້າງຫຼັກຂອງແມັກເນດຮູບສີ່ຫຼ່ຽມຫຼືຮູບແບບ (ຫຼັກຂອງແມັກເນດ UU ຫຼືຫຼັກຂອງແມັກເນດ PQ ແລະອື່ນໆ), ຫຼືໂດຍການໃຊ້ຂດລວງທີ່ບໍ່ສົມດຸນ ![]() ). ການເລືອກເອົາສະເພາະຕ້ອງໄດ້ຮັບການກໍານົດໂດຍຜູ້ໃຊ້ຜ່ານການທົດສອບແຍກສັນຍານຄວາມແຕກຕ່າງເພື່ອກໍານົດວ່າຈໍາເປັນຫຼືບໍ່.
). ການເລືອກເອົາສະເພາະຕ້ອງໄດ້ຮັບການກໍານົດໂດຍຜູ້ໃຊ້ຜ່ານການທົດສອບແຍກສັນຍານຄວາມແຕກຕ່າງເພື່ອກໍານົດວ່າຈໍາເປັນຫຼືບໍ່.
ສໍາລັບຄຸນລັກສະນະຂອງຄວາມຖີ່ຮ່ວມກັນ (common mode inductance), ມັນປະກອບມີຄ່າຄວາມເປັນໄປໄດ້ຂອງດ້ານດຽວ, Rdc, ປະຈຸບັນທີ່ໃຊ້ໃນການຈັດອັນດັບ, ແຮງດັນທີ່ໃຊ້ໃນການຈັດອັນດັບ, ແລະ Hi pot. ຄ່າຄວາມເປັນໄປໄດ້ຂອງແຕ່ລະດ້ານເປັນຕົ້ນຕໍທີ່ກໍານົດຂະໜາດຂອງຄວາມຕ້ານທາງດ້ານຄວາມຖີ່ຮ່ວມກັນ. Rdc ແມ່ນການສູນເສຍ DC ຂອງສາຍໄຟ, ແລະການເພີ່ມຂຶ້ນຂອງອຸນຫະພູມທີ່ເກີດຈາກການສູນເສຍນັ້ນເຮັດໃຫ້ມີຂອບເຂດປະຈຸບັນທີ່ໃຊ້ໃນການຈັດອັນດັບ. ສຸດທ້າຍ, ເນື່ອງຈາກມັນຖືກນໍາໃຊ້ກັບເສັ້ນທາງແຮງດັນສູງ, ຂອບເຂດແຮງດັນ ແລະ ຄວາມຕ້ອງການດ້ານຄວາມປອດໄພຈະຖືກກໍາກັບແຍກຕ່າງຫາກ. ເຖິງຢ່າງໃດກໍຕາມ, ຜູ້ໃຊ້ມັກປະເມີນຜົນກະທົບຂອງຕົວກັ້ນສຽງ, ດັ່ງນັ້ນໂດຍທົ່ວໄປແລ້ວ, ປື້ມລະບຸເອກະລັກສະເພາະຈະສະເໜີຮູບແບບຄົງເຫຼືອມຂອງຄວາມຕ້ານທາງສອງຮູບແບບ. ຮູບແບບໜຶ່ງແມ່ນຮູບແບບຄວາມຕ້ານທາງຄວາມຖີ່ຮ່ວມກັນ/ຄວາມຖີ່ແຕກຕ່າງກັນທີ່ສະແດງໃນຮູບ 9-a, ແລະ ອີກຮູບແບບໜຶ່ງແມ່ນຮູບແບບການສູນເສຍ dB ທີ່ສະແດງໃນຮູບ 9-b. ທັງສອງຮູບແບບນີ້ມີຄ່າເທົ່າກັນ, ແລະ ເສັ້ນສະແດງຮູບແບບການສູນເສຍ dB ຖືກສ້າງຂຶ້ນໂດຍການປ່ຽນຄວາມຕ້ານທາງຄວາມຖີ່ຮ່ວມກັນ/ຄວາມຖີ່ແຕກຕ່າງກັນໃນລະບົບທີ່ມີ 50 Ω+50 Ω.
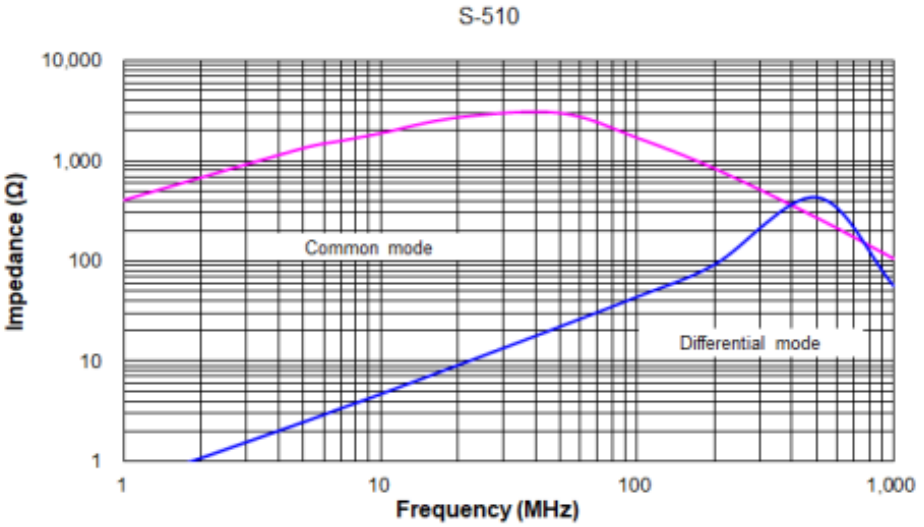
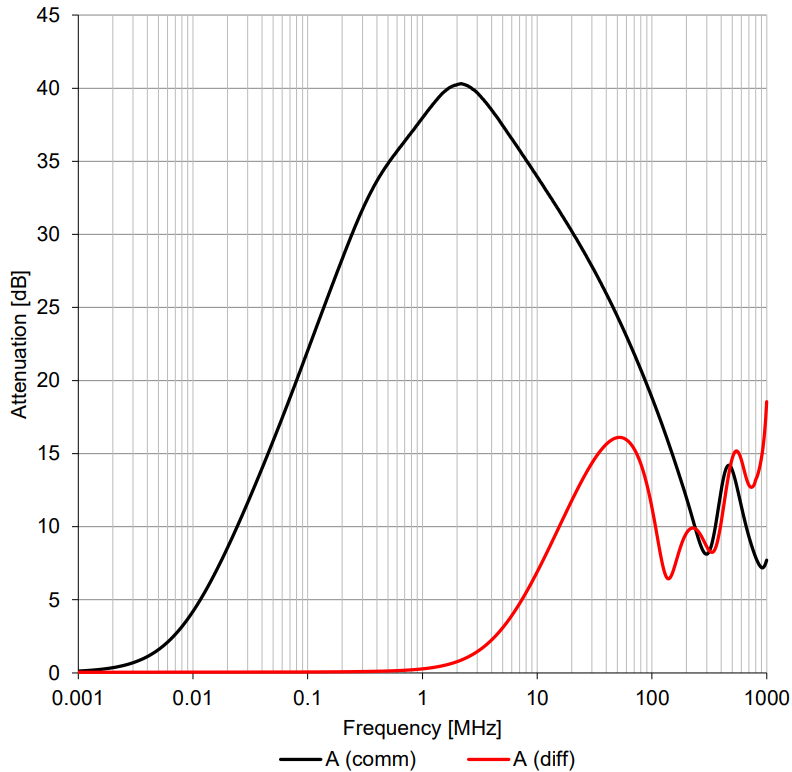
ຮູບ.9 (a) ຮູບແບບຄວາມຕ້ານທາງສາຍສຳພັນ/ຄວາມຕ້ານທາງສາຍຄວາມແຕກຕ່າງ (b) ຮູບແບບຄວາມເສຍຫາຍຕໍ່າ
ສຳລັບຊຸດຂອງຕົວກັນສຽງສາຍສຳພັນດຽວກັນ, ການຫຸ້ມຫໍ່ທີ່ມີຂະໜາດຕ່າງກັນເໝາະສຳລັບກະແສໄຟຟ້າທີ່ແຕກຕ່າງກັນ ແລະ ຂອບເຂດການກັ້ນສຽງ: ຂະໜາດໃຫຍ່ຂຶ້ນຈະເຮັດໃຫ້ຄວາມຕ້ານທາງຂອງຫຼັກເຫຼັກຕ່ຳລົງ, ສາມາດຫຼຸດຈຳນວນເທືອນລວງລົງໄດ້, ສະນັ້ນສາມາດໃຊ້ເສັ້ນລວດທອງແດງທີ່ມີຂະໜາດໃຫຍ່ຂຶ້ນ ແລະ ວົງຈອນກະແສໄຟຟ້າໃຫຍ່ຂຶ້ນ; ຄ່າຄວາມອຸດົມສົມບູນສູງຂຶ້ນ ຫຼື ຄວາມຖີ່ຕຳ່ ຂອງຄວາມອຸດົມສົມບູນຂອງວັດຖຸດິບຈະເຮັດໃຫ້ຂອບເຂດການກັ້ນສຽງແຄບລົງ, ແລະ ຕົວກັນສຽງສາຍສຳພັນດັ່ງກ່າວທີ່ຕິດຕັ້ງຢູ່ໃນວົງຈອນອາດບໍ່ສາມາດກັ້ນສຽງໃນຍະດຽວຄວາມຖີ່ສູງໄດ້.
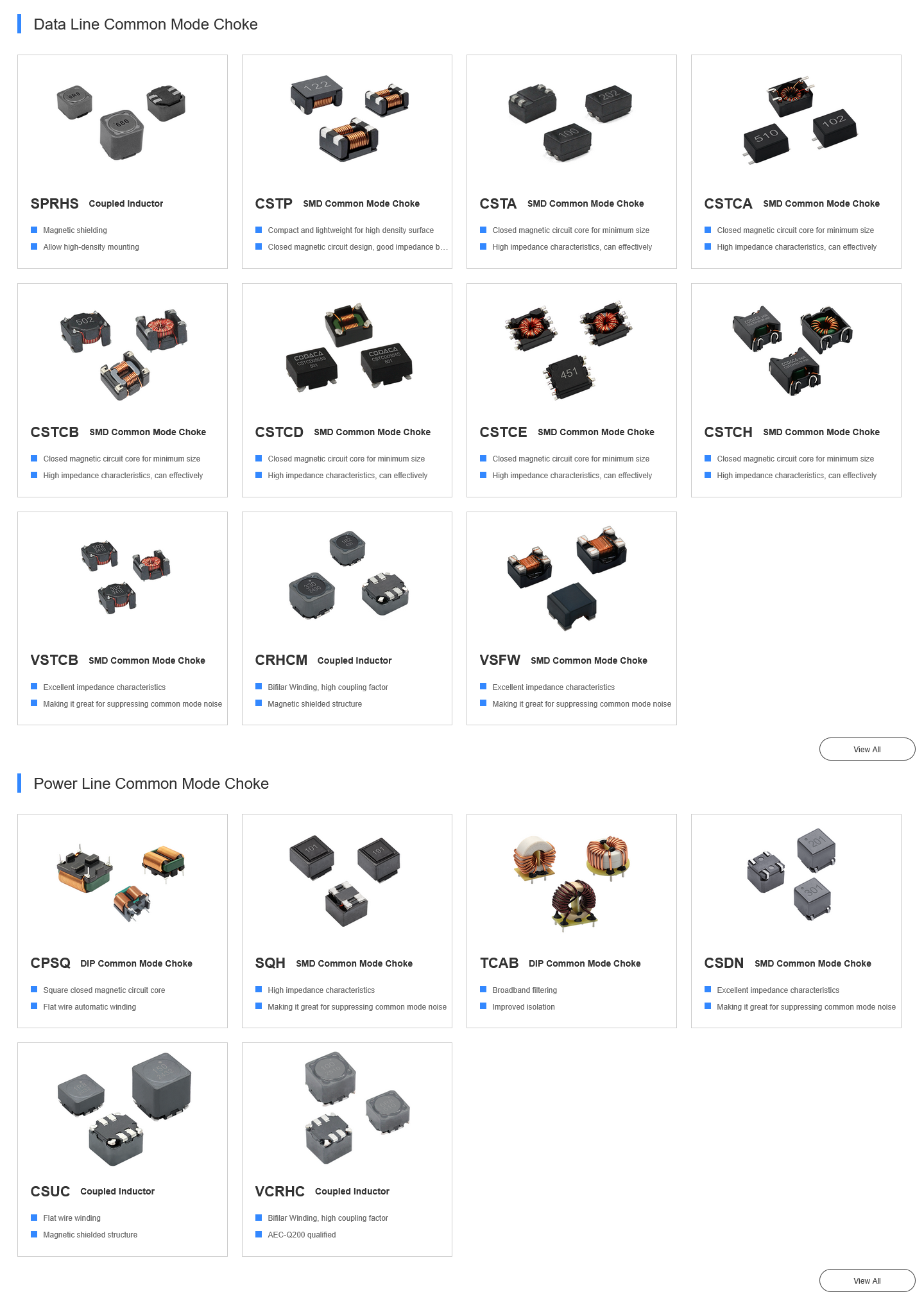
ໂຄດາກາ ອິນດັກຕໍຣະລອງສາມັນຂອງເອເລັກໂຕຣນິກໃນປັດຈຸບັນແບ່ງອອກເປັນສອງສ່ວນຫຼັກຄື: ແຖວສັນຍານ ແລະ ແຖວພະລັງງານ. ມີຊຸດຜະລິດຕະພັນຫຼາຍກວ່າ 10 ຊຸດ, 50 ຂະໜາດທີ່ແຕກຕ່າງກັນ, ແລະ ລະຫັດພາກສ່ວນມາດຕະຖານທີ່ແຕກຕ່າງກັນເກືອບ 300 ລະຫັດ. ພວກມັນຖືກນຳໃຊ້ຢ່າງກ້ວາງຂວາງໃນແຖວສັນຍານເຊັ່ນ CAN BUS, RS485, ແລະ ອຸປະກອນສະຫຼັບພະລັງງານຕັ້ງແຕ່ບໍ່ກີ່ວັດຈົນເຖິງຫຼາຍກິໂລວັດ. ທີມງານ R&D ຂອງພວກເຮົາຍັງສາມາດຊ່ວຍຜູ້ໃຊ້ງານໃນການທົດສອບຈົນເຖິງການວິເຄາະ, ຫຼື ກຳນົດຂະໜາດໃຫ້ເໝາະສົມຕາມຄວາມຕ້ອງການ, ເພື່ອໃຫ້ສຳເລັດການຢັ້ງຢືນ EMC ທີ່ກ່ຽວຂ້ອງ.
ແບບອ້າງ
[1] Infineon Technologies AG. Engineering_report_DEMO_5QSAG_60W1-AN-v01_00-EN.pdf. www.infineon.com
[2] CODACA ຂໍ້ມູນຜະລິດຕະພັນອິນດັກຕ໌ເຊີ: www.codaca.com
[3] Clayton R.Paul. ສະເໜີຄວາມເຂົ້າກັນໄດ້ຂອງແມ່ເຫຼັກໄຟຟ້າ. ສະບັບທີ 2. Wiley-interscience.
[4] Bhag Singh Guru ແລະ Huseyin R. Hiziroglu. ພື້ນຖານທິດສະດີຂອງສະຫະກັນລະຫວ່າງໄຟຟ້າກັບແມ່ເຫຼັກ. ສະບັບທີ 2. Cambridge University Press.
ຄຳອະທິບາຍກ່ຽວກັບການປົກປ້ອງຊັບສິນທາງປັນຍາ
CODACA "ຫຼື" Codaca "ເປັນເຄື່ອງໝາຍກາຄ້າທີ່ໄດ້ຈົດທະບຽນຂອງບໍລິສັດ Shenzhen Codaca Electronic Co., Ltd. ການນໍາໃຊ້ຫຼືການອ້າງອີງເຖິງຂໍ້ຄວາມ, ຂໍ້ມູນ, ຫຼືຂໍ້ມູນສາທາລະນະອື່ນໆທີ່ມີເນື້ອໃນດ້ານຊັບສິນທາງປັນຍາທີ່ໄດ້ເຜີຍແຜ່ ຫຼື ແຈກຢາຍໂດຍບໍລິສັດ Shenzhen Codaca Electronic Co., Ltd. ຢູ່ໃນຂອບເຂດການປົກປ້ອງຊັບສິນທາງປັນຍາຂອງບໍລິສັດ Shenzhen Codaca Electronic Co., Ltd. ບໍລິສັດ Shenzhen Codaca Electronic Co., Ltd. ສົກເກັບສິทธິໃນການປະກາດ, ການປົກປ້ອງສິດ, ແລະ ສິດອື່ນໆທີ່ກ່ຽວຂ້ອງ. ເພື່ອຄວາມຈະແຈ້ງວ່າທ່ານບໍ່ມີຂໍ້ຂັດແຍ່ງດ້ານຊັບສິນທາງປັນຍາໃນເລື່ອງທີ່ກ່ຽວຂ້ອງ, ກະລຸນາຕິດຕໍ່ບໍລິສັດ Shenzhen Kedajia Electronics Co., Ltd. ຖ້າຈໍາເປັນ.